
Rekabet etmek
Artık robotunuzu sürücü kontrolleriyle nasıl hareket ettireceğinizi öğrendiğinize ve farklı sürücü kontrol yapılandırmalarını test ettiğinize göre, Hız ve Puan Mücadelesi'ne hazırsınız.
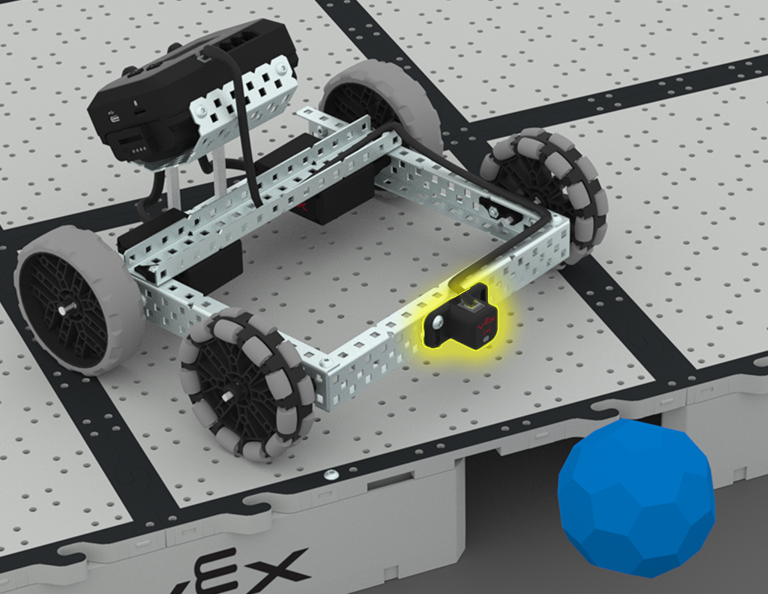
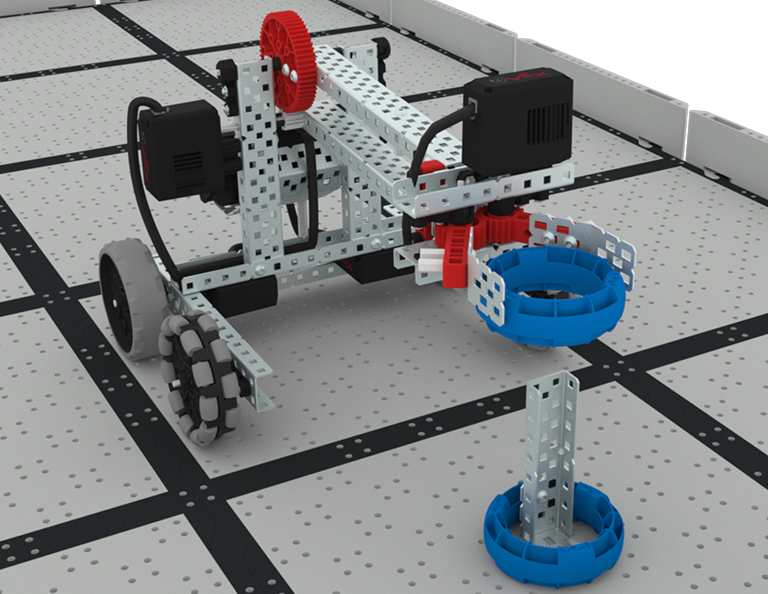
Bu mücadelenin amacı robotunuzu mümkün olan en kısa sürede Saha'daki küçük direkte bulunan iki halkayı da yakalayıp puanlamaya yönlendirmektir. Aşağıdaki animasyon, Saha'nın nasıl kurulması gerektiğini ve her iki yüzüğü de sürmenin ve puanlamanın olası bir yolunu gösteriyor. Her iki halkayı da en hızlı atan robot kazanır.
Hız ve Puan yarışmasını tamamlamak için bu belgedeki adımları izleyin. Google / .docx / .pdf
Hız ve Puan yarışmasını tamamladığınızda öğretmeninize danışın. Meydan okumanın sonuçlarını mühendislik not defterinize kaydettiğinizden emin olun.
Aşağıdaki videoda Clawbot sahanın sol tarafında yer alıyor. Sahada iki halka vardır: biri sahanın üst kısmına yakın, ikinci ve üçüncü taşlar arasında, diğeri ise sahanın alt kısmına yakın, yine ikinci ve üçüncü taşlar arasında yer alır. Sahanın ortasında, sağ tarafa doğru tek bir direk var. Video geri sayımla başlıyor: 3, 2, 1. Pençebot ikinci ve üçüncü karelere doğru ilerler ve ardından ilk halkaya doğru hareket ederek onu alır. Daha sonra pençesini kaldırır ve geri çekilir. Daha sonra direğe doğru ilerler ve pençeyi serbest bırakarak yüzüğün direğe düşmesini sağlar. Daha sonra Pençebot geri çekilir ve pençeyi indirir. Daha sonra sahanın alt tarafındaki ikinci halkaya doğru gidiyor, topu alıyor, dönüyor ve direğe doğru gidiyor. Pençe Robot pençeyi serbest bırakır ve yüzüğün direğe düşmesini sağlar. Bu noktada, meydan okumanın tamamlanmasıyla zamanlayıcı durur ve 21.22 saniyeyi gösterir.
Özet Yansıması
Artık bir strateji oluşturup Hız ve Puan Mücadelesinde yarıştığınıza göre, bu Derste öğrendiklerinizi ve yaptıklarınızı düşünmenin zamanı geldi. Mühendislik defterinizde yeni bir sayfa açarak düşüncelerinizi gözden geçirmeye başlayın.
Aşağıdaki kavramların her biri için mühendislik not defterinizde kendinizi acemi, çırak veya uzman olarak derecelendirin. Her kavram için kendinize neden bu puanı verdiğinizi kısaca açıklayın:
- Sürüş ihtiyaçlarımı ve becerilerimi en iyi şekilde karşılayacak şekilde Sürücü Kontrol programını nasıl özelleştirebilirim?
- Pençe ve kolumu yüzükleri puanlamak için verimli bir şekilde kullanmama olanak tanıyan bir sürücü kontrol yapılandırması seçmek
- Daha hızlı yüzük kazanmak için ekibimle birlikte bir sürüş stratejisi geliştiriyorum
Hangi kategoriye girdiğinizi belirlemenize yardımcı olması için bu tabloyu kullanın.
| Uzman | Kavramı tam olarak anladığımı ve bunu başkasına öğretebileceğimi düşünüyorum. |
| Çırak | Yarışmaya katılabilecek kadar konsepti anladığımı düşünüyorum. |
| Acemi | Konsepti anlamadığımı ve meydan okumayı nasıl tamamlayacağımı bilmediğimi hissediyorum. |
Sırada Ne Var?
Bu Derste, robotunuzun yüzükleri daha etkili bir şekilde alıp puanlayabilmesi için sürücü kontrollerini nasıl kullanacağınızı öğrendiniz. Daha sonra Hız ve Puan Yarışması'nda yarıştınız. Bir sonraki Derste şunları yapacaksınız:
- Otonom hareketleri kodlama hakkında bilgi edinin
- Bir yol planlayın ve robotunuzun otonom olarak hareket etmesini sağlayacak şekilde kodlayın
- Coding Crunch Challenge'a katılın!
Ders Genel Bakışına geri dönmek için < Ders Dön'ü seçin.
Sonraki Ders > seçerek Ders 3'e geçin ve otonom hareketleri kodlamayı öğrenin.