
Competere
Ora che hai imparato a muovere il tuo robot con i comandi del driver e hai testato diverse configurazioni dei comandi del driver, sei pronto per la sfida Velocità e Punteggio.
L'obiettivo di questa sfida è guidare il tuo robot affinché afferri e segni entrambi gli anelli sul piccolo palo sul campo nel minor tempo possibile. L'animazione sottostante mostra come dovrebbe essere impostato il campo e un possibile modo per guidare e segnare entrambi gli anelli. Vince il robot che totalizza più velocemente entrambi gli anelli.
Segui i passaggi in questo documento per completare la sfida Velocità e Punteggio. Google / .docx / .pdf
Una volta completata la sfida Velocità e Punteggio, consulta il tuo insegnante. Assicurati di aver documentato i risultati della sfida nel tuo quaderno di progettazione.
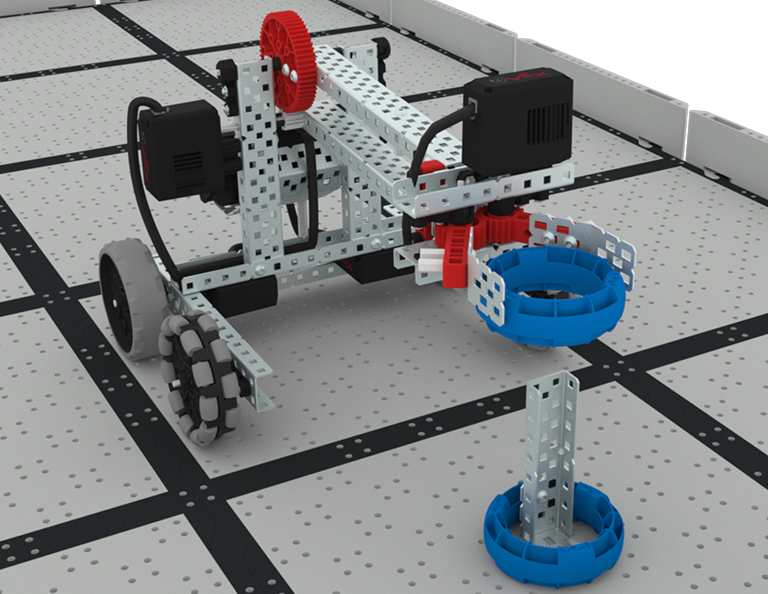
Nel video qui sotto, il Clawbot si trova sul lato sinistro del campo. Ci sono due anelli sul campo: uno situato nella parte superiore del campo, tra la seconda e la terza tessera, e un altro nella parte inferiore del campo, sempre tra la seconda e la terza tessera. C'è un singolo palo in mezzo al campo, verso il lato destro. Il video inizia con un conto alla rovescia: 3, 2, 1. Il Clawbot si sposta verso la seconda e la terza tessera, poi sale verso il primo anello e lo raccoglie. Poi alza l'artiglio e indietreggia. Poi si dirige verso il palo e rilascia l'artiglio, lasciando cadere l'anello sul palo. Dopodiché, il Clawbot indietreggia e abbassa l'artiglio. Poi si dirige verso il secondo anello in fondo al campo, lo raccoglie, gira e si dirige verso il palo. Il Clawbot rilascia l'artiglio, consentendo all'anello di cadere sul palo. A questo punto il timer si ferma, poiché la sfida è completata: sono trascorsi 21,22 secondi.
Conclusione Riflessione
Ora che hai creato una strategia e hai partecipato alla sfida Velocità e Punteggio, è il momento di riflettere su ciò che hai imparato e fatto in questa lezione. Inizia una nuova pagina del tuo quaderno di ingegneria per iniziare la tua riflessione.
Valuta te stesso come principiante, apprendista o esperto per ciascuno dei seguenti concetti nel tuo quaderno di ingegneria. Fornisci una breve spiegazione del motivo per cui hai assegnato quella valutazione a ciascun concetto:
- Come personalizzare il programma Driver Control per soddisfare al meglio le mie esigenze e capacità di guida
- Scelta di una configurazione di controllo del driver che mi consenta di utilizzare in modo efficiente l'artiglio e il braccio per segnare gli anelli
- Collaborare con il mio team per sviluppare una strategia di guida per segnare gli anelli più rapidamente
Utilizza questa tabella per aiutarti a determinare in quale categoria rientri.
| Esperto | Ritengo di aver compreso appieno il concetto e di poterlo insegnare a qualcun altro. |
| Apprendista | Ritengo di aver compreso il concetto a sufficienza per poter partecipare alla sfida. |
| Novizio | Ho la sensazione di non aver capito il concetto e di non sapere come portare a termine la sfida. |
Cosa succederà ora?
In questa lezione hai imparato a usare i comandi del conducente per muovere il tuo robot e raccogliere e segnare gli anelli in modo più efficace. Poi hai partecipato alla sfida Velocità e Punteggio. Nella prossima lezione:
- Scopri come codificare i movimenti autonomi
- Pianifica un percorso e codifica il tuo robot per muoversi in modo autonomo
- Partecipa alla Coding Crunch Challenge!
Seleziona < Ritorna alle Lezioni per tornare alla Panoramica della lezione.
Seleziona Lezione successiva > per continuare alla Lezione 3 e apprendere come codificare i movimenti autonomi.