
Lección 3: Convertir el robot de realidad virtual
Ahora que has derribado el primer castillo en el Castle Crasher Playground, necesitarás que el robot de realidad virtual gire para derribar a otro. Esta lección lo guiará a través de los pasos para girar el robot VR y derribar dos edificios en el patio de juegos Castle Crasher .
Resultados de aprendizaje
- Identifique cómo utilizar el comando turn_for para girar el robot VR hacia la derecha o hacia la izquierda.
- Identifique cómo utilizar el comando turn_to_heading para girar el robot VR a un rumbo determinado en el sentido de las agujas del reloj.
Cambiar el nombre del proyecto
- Si el código de la lección anterior aún no está cargado, cargue el proyecto Unit2Lesson2.
- Cambie el nombre del proyecto seleccionando el cuadro de nombre del proyecto.

- Introduzca el nuevo nombre del proyectoUnit2Lesson3 y seleccione "Guardar".

Girar a la derecha o a la izquierda
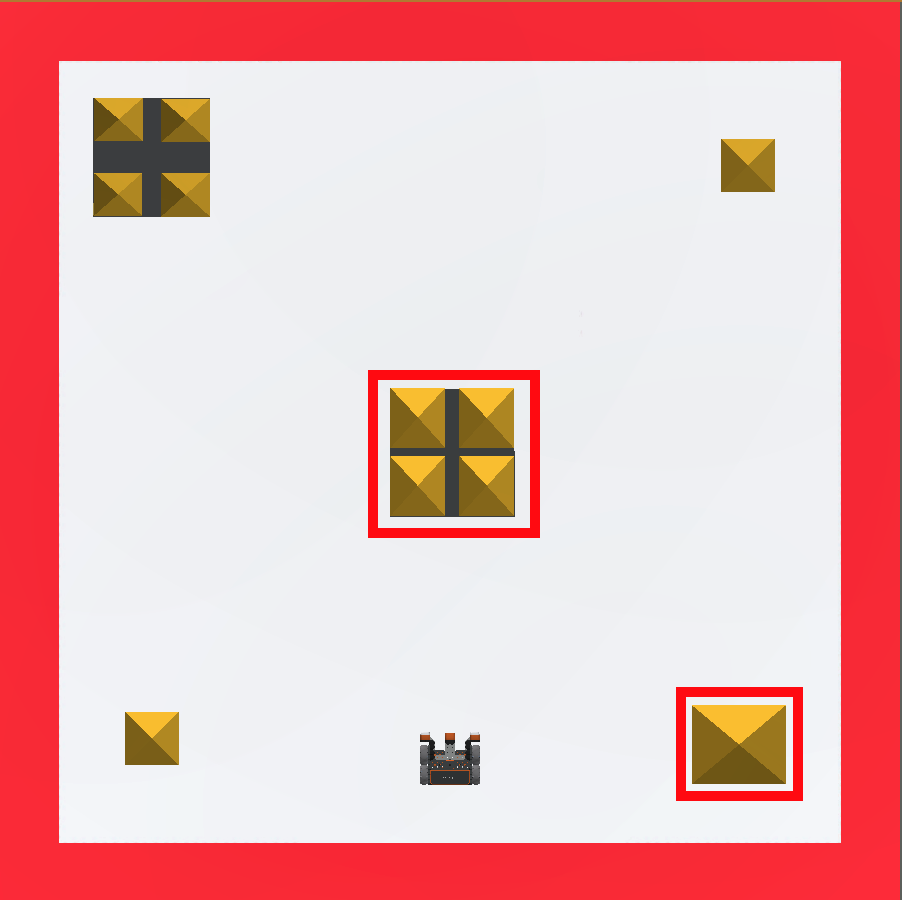
El comando turn_for gira el robot VR una cantidad determinada de grados. Este ejemplo hará que el robot VR avance para derribar el edificio central, retroceda al inicio y luego gire y golpee el edificio en la esquina inferior derecha en el Castle Crasher Playground.
Para su información
Para hacer que un robot VR gire a diferentes velocidades, la velocidad de giro se puede aumentar o disminuir usando el comando set_turn_velocity . El comando set_turn_velocity acepta un rango de 0 a 100 para el parámetro de velocidad. La velocidad predeterminada es del 50%. El cambio de velocidad se aplicará a cualquier comando posterior de la transmisión.
drivetrain.set_turn_velocity(50, POR CIENTO)-
Arrastre o escriba un comando turn_for debajo del comando drive_ for. Establezca los parámetros del comando turn_for para girar 90 grados a la derecha. Este proyecto tiene los comandos set_drive_velocity y set_turn_velocity agregados y configurados al 100%. Tu proyecto debería verse así:
# Add project code in "main" def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) -
Arrastre o escriba el comando drive_for debajo del comando turn_ for. Establezca los parámetros del comando drive_for para avanzar 700 milímetros (mm). Tu proyecto debería verse así:
# Add project code in "main" def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) - Selecciona el botón “Abrir patio de juegos” para iniciar el patio de juegos Castle Crasher si aún no está abierto.

- Seleccione el botón "Iniciar" para probar el proyecto.

-
Observa cómo el robot VR avanza y choca con el edificio central antes de volver al inicio. El robot VR girará a la derecha 90 grados y avanzará para chocar con el edificio en la esquina inferior derecha del Castle Crasher Playground.

Seleccione el botón Siguiente para continuar con el resto de esta lección.