
പാഠം 3: VR റോബോട്ട് തിരിക്കുക
ഇപ്പോൾ നിങ്ങൾ കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട്ലെ ആദ്യത്തെ കോട്ടയെ തകർത്തുകഴിഞ്ഞു, മറ്റൊന്നിനെ തകർക്കാൻ നിങ്ങൾക്ക് VR റോബോട്ട് തിരിയേണ്ടി വരും. കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട്ലെ VR റോബോട്ടിനെ എങ്ങനെ തിരിക്കാമെന്നും രണ്ട് കെട്ടിടങ്ങൾ എങ്ങനെ മറിച്ചിടാമെന്നും ഈ പാഠം നിങ്ങളെ പഠിപ്പിക്കും.
പഠന ഫലങ്ങൾ
- VR റോബോട്ടിനെ വലത്തോട്ടോ ഇടത്തോട്ടോ തിരിക്കാൻ turn_forകമാൻഡ് എങ്ങനെ ഉപയോഗിക്കാമെന്ന് തിരിച്ചറിയുക.
- VR റോബോട്ടിനെ ഘടികാരദിശയിൽ നൽകിയിരിക്കുന്ന ഒരു തലക്കെട്ടിലേക്ക് തിരിക്കാൻ turn_to_headingകമാൻഡ് എങ്ങനെ ഉപയോഗിക്കാമെന്ന് തിരിച്ചറിയുക.
പ്രോജക്റ്റിന്റെ പേര് മാറ്റുക
- മുൻ പാഠത്തിന്റെ കോഡ് ലോഡ് ചെയ്തിട്ടില്ലെങ്കിൽ, Unit2Lesson2 പ്രോജക്റ്റ് ലോഡ് ചെയ്യുക.
- പ്രോജക്റ്റ് നെയിം ബോക്സ് തിരഞ്ഞെടുത്ത് പ്രോജക്റ്റിന്റെ പേര് മാറ്റുക.

- പുതിയ പ്രോജക്റ്റ് നാമം Unit2Lesson3നൽകുക, തുടർന്ന് “സേവ്” തിരഞ്ഞെടുക്കുക.

വലത്തോട്ടോ ഇടത്തോട്ടോ തിരിയുക
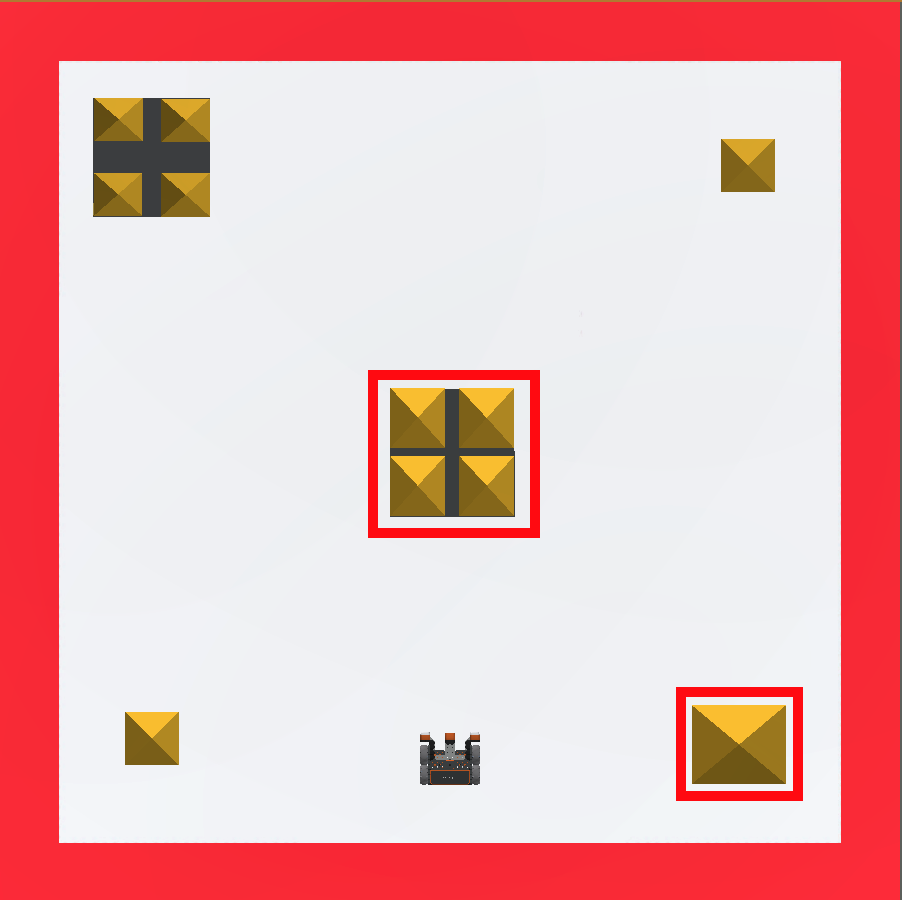
turn_for കമാൻഡ് VR റോബോട്ടിനെ ഒരു നിശ്ചിത എണ്ണം ഡിഗ്രി തിരിക്കുന്നു. ഈ ഉദാഹരണത്തിൽ കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട്ൽ, മധ്യഭാഗത്തെ കെട്ടിടം മറിഞ്ഞ് മുന്നോട്ട് നീങ്ങാനും, തുടക്കത്തിലേക്ക് തിരികെ റിവേഴ്സ് ചെയ്യാനും, തുടർന്ന് താഴെ വലത് കോണിലുള്ള കെട്ടിടം മറിഞ്ഞ് തിരിക്കാനും VR റോബോട്ട് സഹായിക്കും.
നിങ്ങളുടെ അറിവിലേക്കായി
ഒരു VR റോബോട്ടിനെ വ്യത്യസ്ത വേഗതയിൽ തിരിക്കാൻ,set_turn_velocityകമാൻഡ് ഉപയോഗിച്ച് ടേൺ പ്രവേഗം കൂട്ടുകയോ കുറയ്ക്കുകയോ ചെയ്യാം. set_turn_velocityകമാൻഡ് പ്രവേഗ പാരാമീറ്ററിനായി 0 മുതൽ 100 വരെയുള്ള ശ്രേണി സ്വീകരിക്കുന്നു. സ്ഥിരസ്ഥിതി വേഗത 50% ആണ്. വേഗത മാറ്റുന്നത് തുടർന്നുള്ള ഏതൊരു ഡ്രൈവ്ട്രെയിൻ കമാൻഡുകൾക്കും ബാധകമാകും.
ഡ്രൈവ്ട്രെയിൻ.സെറ്റ്_ടേൺ_വെലോസിറ്റി(50, ശതമാനം)-
drive_for കമാൻഡിന് താഴെയായിturn_for കമാൻഡ് ഡ്രാഗ് ചെയ്യുക അല്ലെങ്കിൽ ടൈപ്പ് ചെയ്യുക. turn_forകമാൻഡിന്റെ പാരാമീറ്ററുകൾ വലത്തേക്ക് 90 ഡിഗ്രി തിരിയാൻ സജ്ജമാക്കുക. ഈ പ്രോജക്റ്റിൽ set_drive_velocity ഉം set_turn_velocity കമാൻഡുകളും ചേർത്ത് 100% ആയി സജ്ജീകരിച്ചിരിക്കുന്നു. നിങ്ങളുടെ പ്രോജക്റ്റ് ഇതുപോലെ ആയിരിക്കണം:
# "main" എന്നതിൽ പ്രോജക്റ്റ് കോഡ് ചേർക്കുക def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) -
turn_for കമാൻഡിന് താഴെയായി drive_for കമാൻഡ് ഡ്രാഗ് ചെയ്യുക അല്ലെങ്കിൽ ടൈപ്പ് ചെയ്യുക. 700 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) മുന്നോട്ട് ഡ്രൈവ് ചെയ്യുന്നതിന് drive_forകമാൻഡിന്റെ പാരാമീറ്ററുകൾ സജ്ജമാക്കുക. നിങ്ങളുടെ പ്രോജക്റ്റ് ഇതുപോലെ ആയിരിക്കണം:
# "main" എന്നതിൽ പ്രോജക്റ്റ് കോഡ് ചേർക്കുക def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) - കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട് ഇതിനകം തുറന്നിട്ടില്ലെങ്കിൽ അത് സമാരംഭിക്കുന്നതിന് "ഓപ്പൺ പ്ലേഗ്രൗണ്ട്" ബട്ടൺ തിരഞ്ഞെടുക്കുക.

- പ്രോജക്റ്റ് പരീക്ഷിക്കാൻ "ആരംഭിക്കുക" ബട്ടൺ തിരഞ്ഞെടുക്കുക.

-
VR റോബോട്ട് മുന്നോട്ട് ഓടിച്ച് മധ്യഭാഗത്തെ കെട്ടിടത്തിൽ ഇടിക്കുന്നത് കണ്ട് തിരികെ തുടക്കത്തിലേക്ക് പോകുന്നത് കാണുക. തുടർന്ന് VR റോബോട്ട് 90 ഡിഗ്രി വലത്തേക്ക് തിരിഞ്ഞ് മുന്നോട്ട് നീങ്ങി Castle Crasher Playgroundന്റെ താഴെ വലത് കോണിലുള്ള കെട്ടിടത്തിൽ ഇടിക്കും.

ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.