
Pelajaran 3: Memutar Robot VR
Sekarang setelah Anda merobohkan kastil pertama di Castle Crasher Playground, Anda akan memerlukan Robot VR untuk berbalik dan merobohkan kastil berikutnya. Pelajaran ini akan memandu Anda melalui langkah-langkah untuk membalikkan Robot VR dan merobohkan dua bangunan di Castle Crasher Playground.
Hasil belajar
- Identifikasi cara menggunakan perintah turn_foruntuk memutar Robot VR ke kanan atau kiri.
- Identifikasi cara menggunakan perintah turn_to_headinguntuk memutar Robot VR ke arah searah jarum jam yang ditentukan.
Ganti Nama Proyek
- Jika kode pelajaran sebelumnya belum dimuat, muat proyek Unit2Lesson2.
- Ganti nama proyek dengan memilih kotak nama proyek.

- Masukkan nama proyek baru Unit2Lesson3, dan pilih “Simpan.”

Belok Kanan atau Kiri
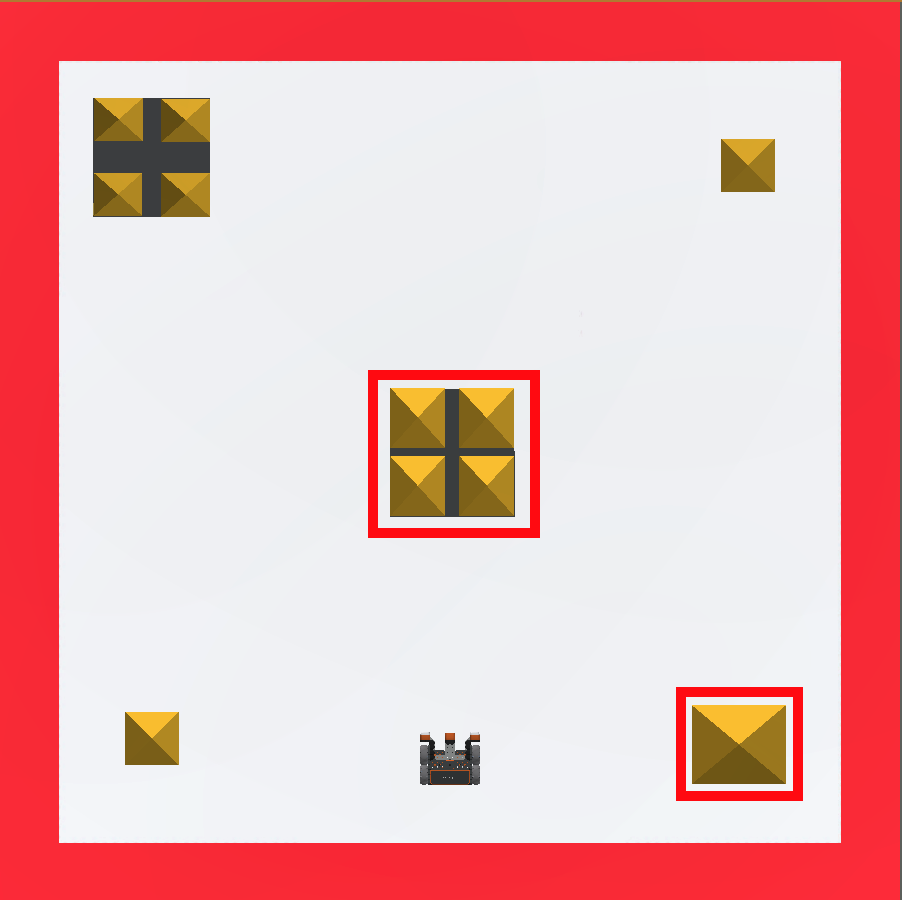
Perintah turn_for memutar Robot VR sejumlah derajat tertentu. Contoh ini akan membuat Robot VR melaju maju untuk merobohkan bangunan di tengah, mundur kembali ke awal, lalu berbalik dan merobohkan bangunan di sudut kanan bawah pada Castle Crasher Playground.
Untuk Informasi Anda
Untuk membuat Robot VR berputar pada kecepatan berbeda, kecepatan putaran dapat ditingkatkan atau dikurangi menggunakan perintahset_turn_velocity. Perintahset_turn_velocitymenerima rentang 0 - 100 untuk parameter kecepatan. Kecepatan default adalah 50%. Mengubah kecepatan akan berlaku pada perintah Drivetrain berikutnya.
drivetrain.set_turn_velocity(50, PERSEN)-
Seret atau ketik perintahturn_for di bawah perintah drive_for. Tetapkan parameter perintah turn_foruntuk berbelok ke kanan 90 derajat. Proyek ini memiliki perintah set_drive_velocity dan set_turn_velocity yang ditambahkan dan ditetapkan ke 100%. Proyek Anda akan terlihat seperti ini:
# Tambahkan kode proyek di "utama" def main(): drivetrain.set_drive_velocity(100, PERSEN) drivetrain.set_turn_velocity(100, PERSEN) drivetrain.drive_for(MAJU, 800, MM) drivetrain.drive_for(BALIK, 800, MM) drivetrain.turn_for(KANAN, 90, DERAJAT) -
Seret atau ketik perintah drive_for di bawah perintah turn_for. Tetapkan parameter perintah drive_foruntuk bergerak maju sejauh 700 milimeter (mm). Proyek Anda akan terlihat seperti ini:
# Tambahkan kode proyek di "utama" def main(): drivetrain.set_drive_velocity(100, PERSEN) drivetrain.set_turn_velocity(100, PERSEN) drivetrain.drive_for(MAJU, 800, MM) drivetrain.drive_for(MUNDUR, 800, MM) drivetrain.turn_for(KANAN, 90, DERAJAT) drivetrain.drive_for(MAJU, 700, MM) - Pilih tombol “Buka Playground” untuk meluncurkan Castle Crasher Playground jika belum terbuka.

- Pilih tombol “Mulai” untuk menguji proyek.

-
Saksikan Robot VR melaju ke depan dan bertabrakan dengan bangunan di tengah sebelum berbalik kembali ke titik awal. Robot VR kemudian akan berbelok ke kanan 90 derajat dan melaju ke depan untuk bertabrakan dengan bangunan di sudut kanan bawah Castle Crasher Playground.

Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.