
Leçon 3 : Tourner le robot VR
Maintenant que vous avez renversé le premier château du Castle Crasher Playground, vous aurez besoin que le robot VR se retourne pour en renverser un autre. Cette leçon vous guidera à travers les étapes à suivre pour faire tourner le robot VR et renverser deux bâtiments sur le Castle Crasher Playground.
Résultats d'apprentissage
- Identifiez comment utiliser la commande turn_for pour tourner le robot VR à droite ou à gauche.
- Identifiez comment utiliser la commande turn_to_heading pour faire tourner le robot VR vers un cap donné dans le sens des aiguilles d'une montre.
Renommer le projet
- Si le code de la leçon précédente n'est pas déjà chargé, chargez le projet Unit2Lesson2.
- Renommez le projet en sélectionnant la zone de nom de projet.

- Saisissez le nouveau nom du projet Unit2Lesson3, puis sélectionnez Enregistrer.

Tourner à droite ou à gauche
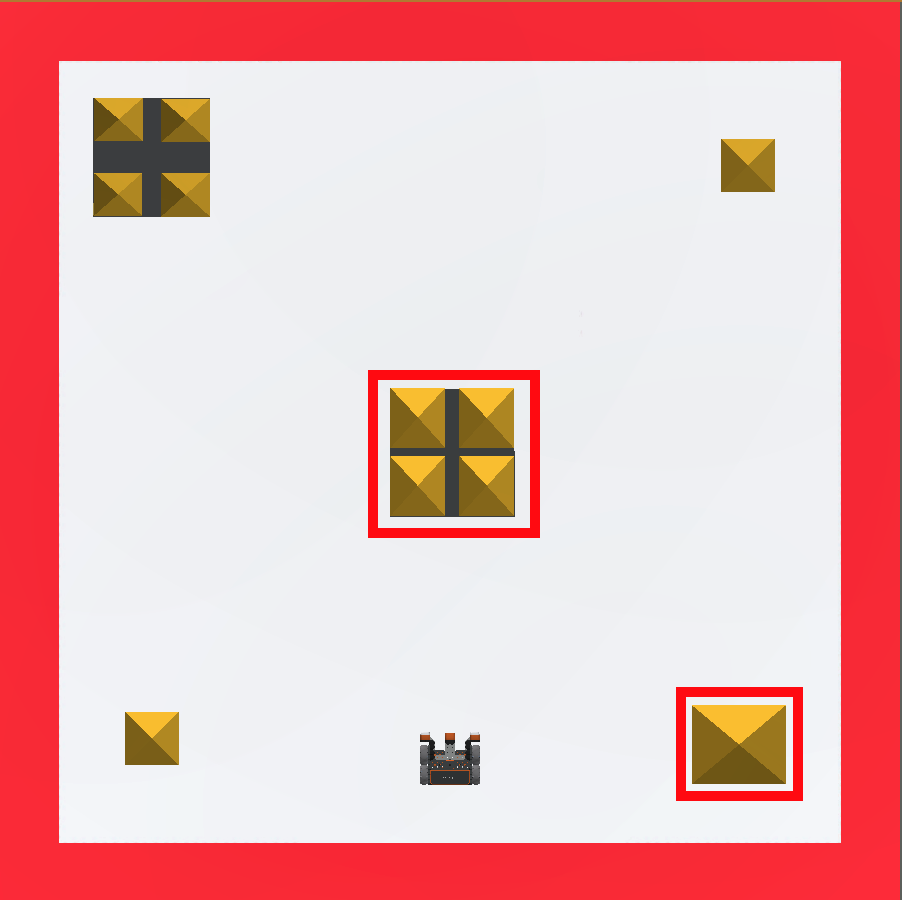
La commande turn_for fait pivoter le robot VR d'un nombre de degrés donné. Cet exemple fera avancer le robot VR pour renverser le bâtiment central, reculer jusqu'au départ, puis tourner et renverser le bâtiment dans le coin inférieur droit sur le Castle Crasher Playground.
Pour votre information
Pour faire tourner un robot VR à différentes vitesses, la vitesse de rotation peut être augmentée ou diminuée à l'aide de la commande set_turn_velocity . La commande set_turn_velocity accepte une plage de 0 à 100 pour le paramètre de vitesse. La vitesse par défaut est de 50 %. La modification de la vitesse s'appliquera à toutes les commandes ultérieures du groupe motopropulseur.
drivetrain.set_turn_velocity(50 %)-
Faites glisser ou tapez une commande turn_for sous la commande drive_for. Définissez les paramètres de la commande turn_for pour tourner à droite de 90 degrés. Ce projet a les commandes set_drive_velocity et set_turn_velocity ajoutées et définies à 100 %. Votre projet doit ressembler à ceci :
# Add project code in "main" def main() : drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) -
Faites glisser ou tapez la commande drive_for sous la commande turn_for. Définissez les paramètres de la commande drive_for pour avancer de 700 millimètres (mm). Votre projet doit ressembler à ceci :
# Add project code in "main" def main() : drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) - Sélectionnez le bouton « Open Playground » pour lancer le Castle Crasher Playground s'il n'est pas déjà ouvert.

- Sélectionnez le bouton « Démarrer » pour tester le projet.

-
Regardez le robot VR avancer et entrer en collision avec le bâtiment central avant de revenir au départ. Le robot VR tournera ensuite à droite de 90 degrés et avancera pour entrer en collision avec le bâtiment dans le coin inférieur droit du Castle Crasher Playground.

Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.