
Bài 3: Xoay Robot VR
Bây giờ bạn đã phá đổ lâu đài đầu tiên trong Castle Crasher Playground, bạn sẽ cần VR Robot quay lại để phá đổ một lâu đài khác. Bài học này sẽ hướng dẫn bạn các bước để xoay Robot VR và đánh đổ hai tòa nhà trên Castle Crasher Playground.
Kết quả học tập
- Xác định cách sử dụng lệnh turn_forđể quay Robot VR sang phải hoặc trái.
- Xác định cách sử dụng lệnh turn_to_headingđể điều khiển Robot VR theo hướng theo chiều kim đồng hồ cho trước.
Đổi tên dự án
- Nếu mã của bài học trước chưa được tải, hãy tải dự án Unit2Lesson2.
- Đổi tên dự án bằng cách chọn hộp tên dự án.

- Nhập tên dự án mới Unit2Lesson3và chọn “Lưu”.

Rẽ phải hoặc trái
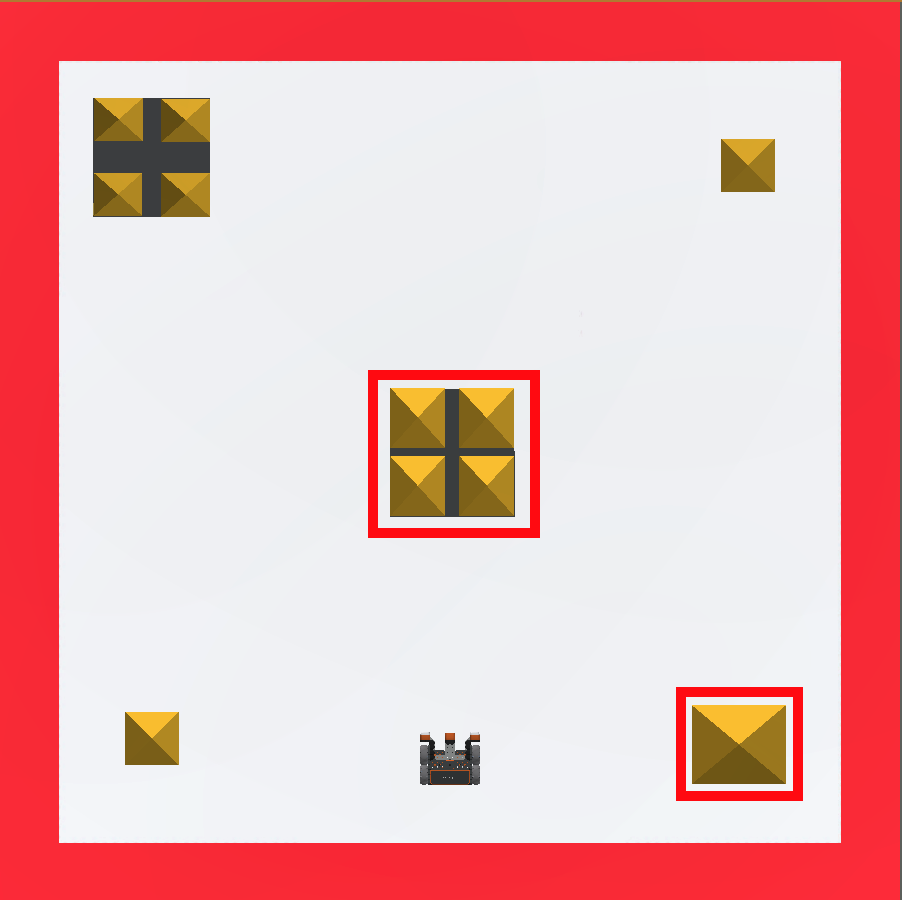
Lệnh turn_for sẽ xoay Robot VR một số độ nhất định. Ví dụ này sẽ cho VR Robot tiến về phía trước để húc đổ tòa nhà ở giữa, lùi lại về điểm bắt đầu, sau đó quay lại và húc đổ tòa nhà ở góc dưới bên phải trên Castle Crasher Playground.
Để bạn biết
Để khiến Robot VR quay ở nhiều tốc độ khác nhau, có thể tăng hoặc giảm tốc độ quay bằng lệnhset_turn_velocity. Lệnhset_turn_velocitychấp nhận phạm vi từ 0 - 100 cho tham số vận tốc. Tốc độ mặc định là 50%. Việc thay đổi vận tốc sẽ áp dụng cho bất kỳ lệnh Truyền động nào tiếp theo.
drivetrain.set_turn_velocity(50, PHẦN TRĂM)-
Kéo vào hoặc nhập lệnhturn_for bên dưới lệnh drive_for. Đặt tham số của lệnh turn_forđể rẽ phải 90 độ. Dự án này đã thêm các lệnh set_drive_velocity và set_turn_velocity và đặt thành 100%. Dự án của bạn sẽ trông như thế này:
# Thêm mã dự án vào "main" def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) -
Kéo vào hoặc nhập lệnh drive_for bên dưới lệnh turn_for. Đặt các tham số của lệnh drive_forđể di chuyển về phía trước 700 milimét (mm). Dự án của bạn sẽ trông như thế này:
# Thêm mã dự án vào "main" def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) - Chọn nút “Mở Sân chơi” để khởi chạy Castle Crasher Sân chơi nếu nó chưa mở.

- Chọn nút “Bắt đầu” để kiểm tra dự án.

-
Hãy xem Robot VR tiến về phía trước và va chạm với tòa nhà ở giữa trước khi quay trở lại điểm xuất phát. Sau đó, VR Robot sẽ rẽ phải 90 độ và tiến về phía trước để va chạm với tòa nhà ở góc dưới bên phải của Castle Crasher Playground.

Chọn nút Tiếp theo để tiếp tục phần còn lại của Bài học này.