
Lição 3: Ligar o robô de RV
Agora que você derrubou o primeiro castelo no Castle Crasher Playground, precisará que o Robô de RV se vire para derrubar outro. Esta lição o guiará pelas etapas para girar o robô de realidade virtual e derrubar dois edifícios no Castle Crasher Playground.
Resultados de Aprendizagem
- Identifique como utilizar o comando turn_for para virar o robô VR para a direita ou para a esquerda.
- Identifique como utilizar o comando turn_to_heading para rodar o robô VR para um determinado rumo no sentido dos ponteiros do relógio.
Mudar o nome do projeto
- Se o código da lição anterior ainda não estiver carregado, carregue o projeto Unit2Lesson2.
- Para mudar o nome do projeto, marque a caixa de nome do projeto.

- Introduza o novo nome do projetoUnit2Lesson3 e selecione "Guardar".

Vire à direita ou à esquerda
O comando turn_for roda o robô VR num determinado número de graus. Este exemplo fará com que o robô VR avance para derrubar o prédio central, reverta para o início e, em seguida, vire e derrube o prédio no canto inferior direito do Castle Crasher Playground.
Para sua informação
Para fazer um robô de RV girar a velocidades diferentes, a velocidade de rotação pode ser aumentada ou diminuída através do comando set_turn_velocity . O comando set_turn_velocity aceita um intervalo de 0 a 100 para o parâmetro de velocidade. A velocidade padrão é de 50%. A alteração da velocidade será aplicada a quaisquer comandos subsequentes do sistema de transmissão.
drivetrain.set_turn_velocity(50, POR CENTO)-
Arraste ou digite um comando turn_for abaixo do comando drive_ for. Defina os parâmetros do comando turn_for para virar 90 graus para a direita. Este projeto tem os comandos set_drive_velocity e set_turn_velocity adicionados e configurados para 100%. O seu projeto deve ter este aspeto:
# Adicione o código do projeto em "main" def main() : drivetrain.set_drive_velocity (100, PERCENT )drivetrain.set_turn_velocity (100, PERCENT )drivetrain.drive_for (FORWARD, 800, MM ) drivetrain.drive_for (REVERSE, 800, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) -
Arraste ou digite o comando drive_for abaixo do comando turn_ for. Defina os parâmetros do comando drive_for para avançar 700 milímetros (mm). O seu projeto deve ter este aspeto:
# Adicione o código do projeto em "main" def main() : drivetrain.set_drive_velocity (100, POR CENTO) drivetrain.set_turn_velocity (100, POR CENTO) drivetrain.drive_for (FORWARD, 800, MM) drivetrain.drive_for (REVERSE, 800, MM ) drivetrain.turn_for (RIGHT, 90, DEGREES ) drivetrain.drive_for (FORWARD, 700, MM) - Selecione o botão "Abrir Playground" para iniciar o Castle Crasher Playground, se ainda não estiver aberto.

- Seleccione o botão "Iniciar" para testar o projecto.

-
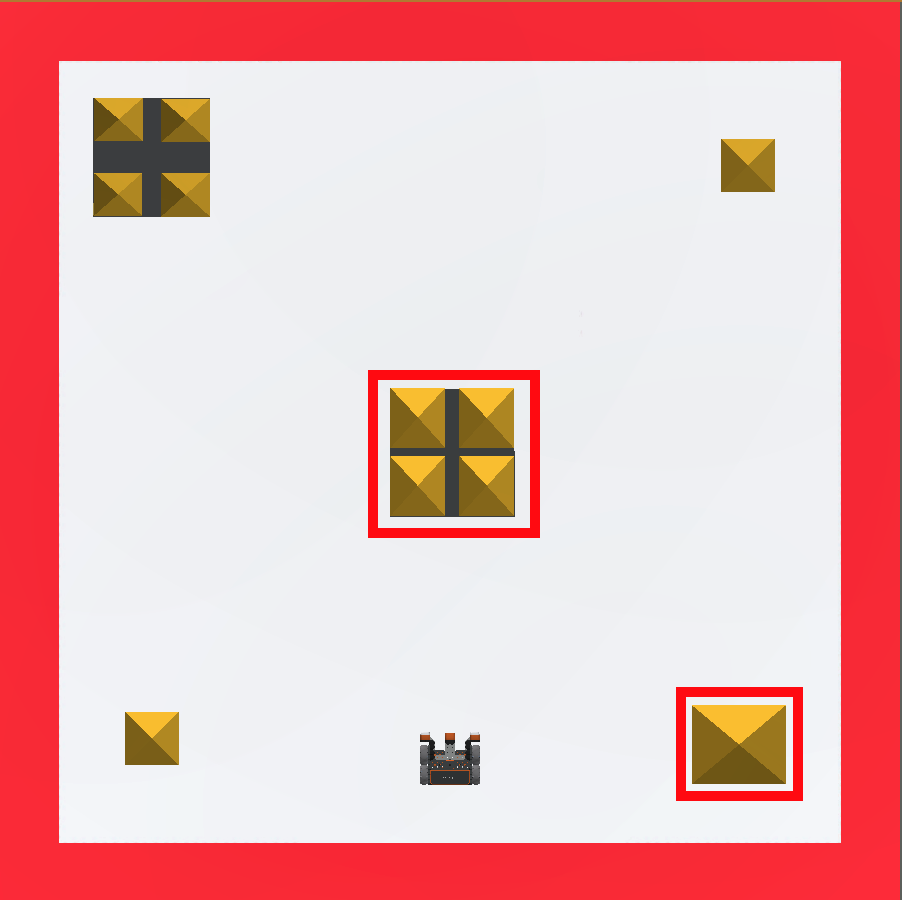
Observe o robô VR avançar e colidir com o edifício central antes de voltar ao início. O robô VR irá virar 90 graus para a direita e avançar para colidir com o edifício no canto inferior direito do Castle Crasher Playground.

Selecione o botão Seguinte para continuar com o resto desta lição.