
Lezione 3: Ruotare il robot VR
Ora che hai abbattuto il primo castello nel parco giochi Castle Crasher , avrai bisogno che il robot VR si giri per abbatterne un altro. Questa lezione ti guiderà attraverso i passaggi necessari per girare il robot VR e abbattere due edifici nel parco giochi Castle Crasher .
Risultati di apprendimento
- Scopri come utilizzare il comando turn_for per girare il robot VR a destra o a sinistra.
- Scopri come utilizzare il comando turn_to_heading per far girare il robot VR in una determinata direzione in senso orario.
Rinomina il progetto
- Se il codice della lezione precedente non è già stato caricato, caricare il progetto Unit2Lesson2.
- Rinominare il progetto selezionando la casella del nome del progetto.

- Inserisci il nuovo nome del progettoUnit2Lesson3 e seleziona "Salva".

Gira a destra o a sinistra
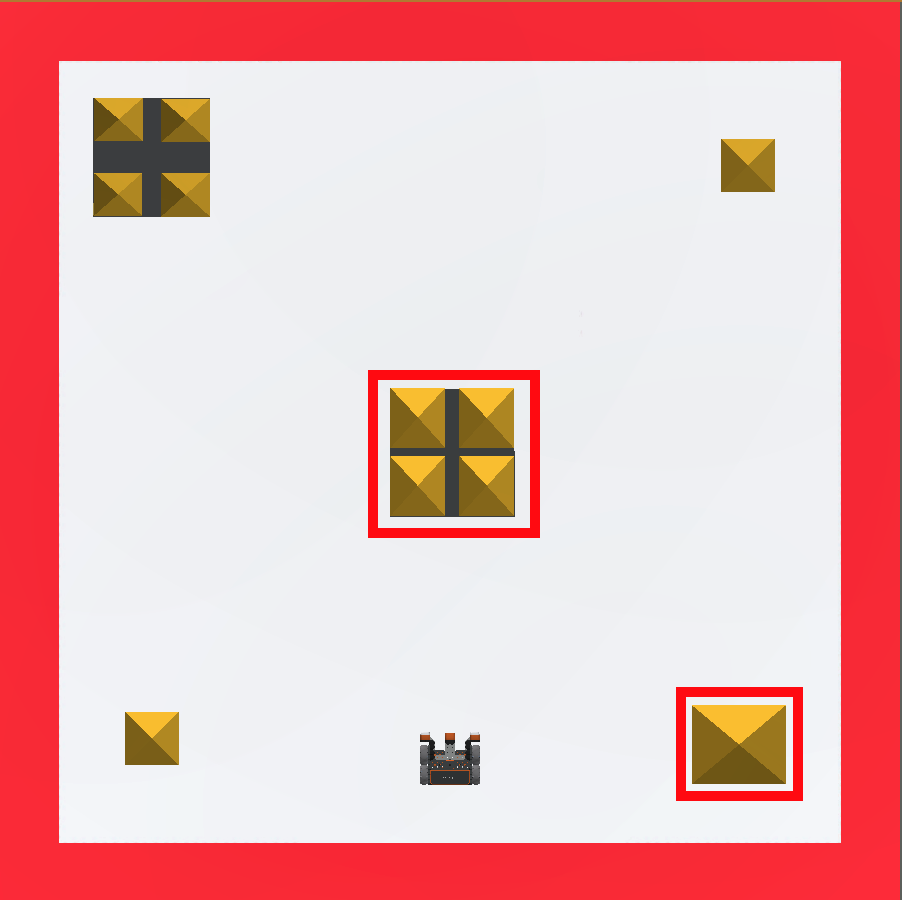
Il comando turn_for ruota il robot VR di un dato numero di gradi. In questo esempio il robot VR procederà in avanti per abbattere l'edificio centrale, tornerà indietro fino al punto di partenza, quindi girerà e abbatterà l'edificio nell'angolo in basso a destra del parco giochi Castle Crasher .
Per tua informazione
Per far girare un robot VR a velocità diverse, la velocità di rotazione può essere aumentata o diminuita utilizzando il comando set_turn_velocity . Il comando set_turn_velocity accetta un intervallo da 0 a 100 per il parametro velocità. La velocità predefinita è del 50%. La modifica della velocità si applicherà a tutti i successivi comandi Drivetrain.
drivetrain.set_turn_velocity(50, PERCENTO)-
Trascinare o digitare un comando turn_for sotto il comando drive_ for. Imposta i parametri del comando turn_for per girare a destra di 90 gradi. A questo progetto sono stati aggiunti i comandi set_drive_velocity e set_turn_velocity , impostati al 100%. Il tuo progetto dovrebbe essere simile a questo:
# Add project code in "main" def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) -
Trascinare o digitare il comando drive_for sotto il comando turn_ for. Impostare i parametri del comando drive_for per avanzare di 700 millimetri (mm). Il tuo progetto dovrebbe essere simile a questo:
# Add project code in "main" def main(): drivetrain.set_drive_velocity (100, PERCENT) drivetrain.set_turn_velocity (100, PERCENT) drivetrain.drive_for (FORWARD, 800, MM) drivetrain.drive_for (REVERSE, 800, MM) drivetrain.turn_for (RIGHT, 90, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) - Selezionare il pulsante "Apri Playground" per avviare Castle Crasher Playground se non è già aperto.

- Selezionare il pulsante "Start" per testare il progetto.

-
Guarda il robot VR avanzare e scontrarsi con l'edificio centrale prima di tornare alla partenza. Il robot VR girerà quindi di 90 gradi a destra e proseguirà in avanti per scontrarsi con l'edificio nell'angolo in basso a destra del parco giochi Castle Crasher .

Selezionare il pulsante Avanti per continuare con il resto della lezione.