
পাঠ ৩: ভিআর রোবট ঘুরিয়ে দেওয়া
এখন যেহেতু আপনি Castle Crasher Playgroundএ প্রথম দুর্গটি ভেঙে ফেলেছেন, তাই অন্য দুর্গটি ভেঙে ফেলার জন্য আপনার VR রোবটের প্রয়োজন হবে। এই পাঠটি আপনাকে Castle Crasher Playground-এ VR রোবটটি ঘুরিয়ে দুটি ভবনে আঘাত করার ধাপগুলি সম্পর্কে জানাবে।
শেখার ফলাফল
- VR রোবটকে ডানে বা বামে ঘুরাতে turn_forকমান্ডটি কীভাবে ব্যবহার করবেন তা শনাক্ত করুন।
- VR রোবটকে একটি নির্দিষ্ট ঘড়ির কাঁটার দিকে ঘুরিয়ে দেওয়ার জন্য turn_to_headingকমান্ডটি কীভাবে ব্যবহার করবেন তা শনাক্ত করুন।
প্রকল্পটির নাম পরিবর্তন করুন
- যদি পূর্ববর্তী পাঠের কোডটি ইতিমধ্যে লোড না করা থাকে, তাহলে Unit2Lesson2 প্রকল্পটি লোড করুন।
- প্রকল্পের নাম বাক্স নির্বাচন করে প্রকল্পটির নাম পরিবর্তন করুন।

- নতুন প্রকল্পের নাম Unit2Lesson3লিখুন এবং "সংরক্ষণ করুন" নির্বাচন করুন।

ডান বা বাম দিকে ঘুরুন
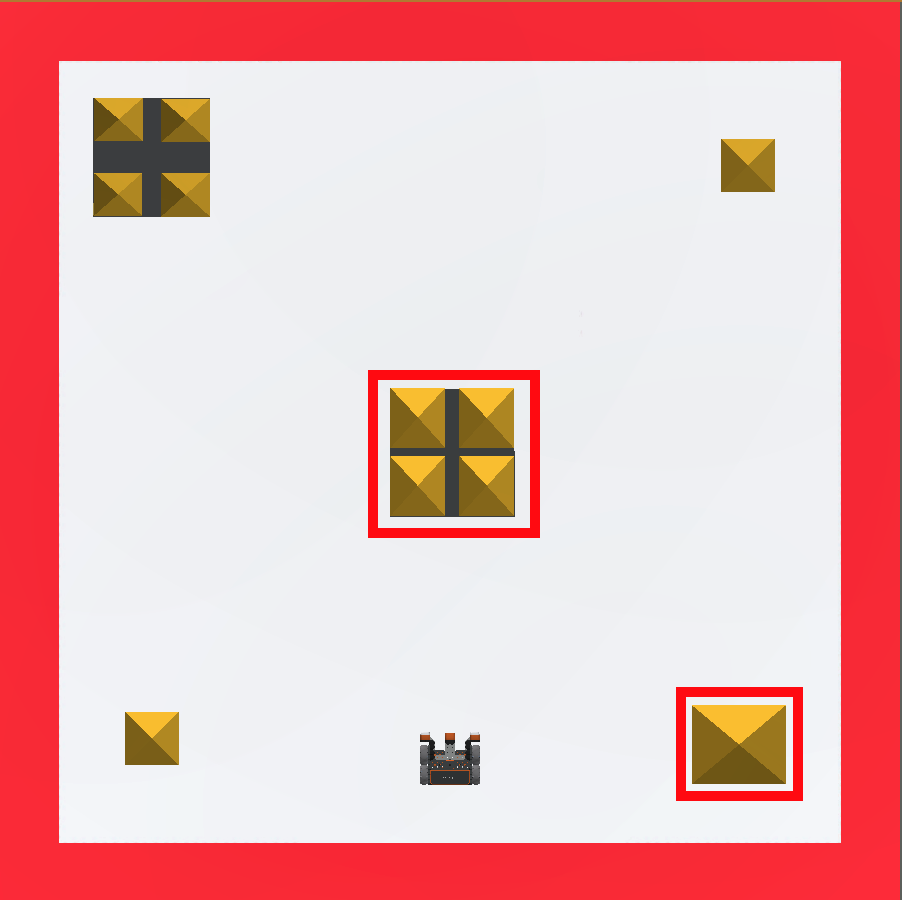
turn_for কমান্ডটি VR রোবটকে নির্দিষ্ট সংখ্যক ডিগ্রি ঘোরায়। এই উদাহরণে VR রোবট ড্রাইভকে কেন্দ্রের বিল্ডিং-এ নক করতে, শুরুতে ফিরে যেতে, তারপরে ক্যাসেল ক্র্যাশার প্লেগ্রাউন্ডতে নীচের ডানদিকে কোণায় বিল্ডিংটির উপর ঘুরতে হবে এবং নক করতে হবে।
আপনার তথ্যের জন্য
একটি VR রোবটকে বিভিন্ন গতিতে ঘুরিয়ে দেওয়ার জন্য,set_turn_velocityকমান্ড ব্যবহার করে ঘুরিয়ে দেওয়ার বেগ বাড়ানো বা কমানো যেতে পারে। set_turn_velocityকমান্ডটি বেগ প্যারামিটারের জন্য 0 - 100 পর্যন্ত একটি পরিসর গ্রহণ করে। ডিফল্ট বেগ 50%। পরিবর্তনের গতিবেগ পরবর্তী যেকোনো ড্রাইভট্রেন কমান্ডের ক্ষেত্রে প্রযোজ্য হবে।
ড্রাইভট্রেন.সেট_টার্ন_বেগ(৫০, শতাংশ)-
drive_for কমান্ডের নীচেturn_for কমান্ড টেনে আনুন অথবা টাইপ করুন। 90 ডিগ্রি ডানে ঘুরতে turn_forকমান্ডের প্যারামিটার সেট করুন। এই প্রকল্পে set_drive_velocity এবং set_turn_velocity কমান্ড যোগ করা হয়েছে এবং 100% এ সেট করা হয়েছে। আপনার প্রকল্পটি দেখতে এরকম হওয়া উচিত:
# "main" তে প্রোজেক্ট কোড যোগ করুন def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) -
turn_for কমান্ডের নিচে drive_for কমান্ডটি টেনে আনুন অথবা টাইপ করুন। ৭০০ মিলিমিটার (মিমি) এগিয়ে নিয়ে যাওয়ার জন্য drive_forকমান্ডের প্যারামিটার সেট করুন। আপনার প্রকল্পটি দেখতে এরকম হওয়া উচিত:
# "main" তে প্রোজেক্ট কোড যোগ করুন def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) - "Open Playground" বোতামটি নির্বাচন করে Castle Crasher Playground চালু করুন, যদি এটি ইতিমধ্যেই খোলা না থাকে।

- প্রকল্পটি পরীক্ষা করতে "স্টার্ট" বোতামটি নির্বাচন করুন।

-
শুরুতে ফিরে যাওয়ার আগে VR রোবটটিকে সামনের দিকে ড্রাইভ করুন এবং কেন্দ্রের বিল্ডিংয়ের সাথে সংঘর্ষ দেখুন। VR রোবটটি তখন ডানদিকে 90 ডিগ্রি ঘুরবে এবং ক্যাসেল ক্র্যাশার প্লেগ্রাউন্ডএর নীচে ডানদিকে বিল্ডিংয়ের সাথে সংঘর্ষের জন্য এগিয়ে যাবে।

এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।