
บทที่ 3: การหมุนหุ่นยนต์ VR
ตอนนี้คุณได้ล้มปราสาทแรกใน Castle Crasher Playgroundแล้ว คุณจะต้องใช้ VR Robot หันไปล้มปราสาทอีกแห่ง บทเรียนนี้จะแนะนำคุณเกี่ยวกับขั้นตอนในการหมุนหุ่นยนต์ VR และล้มอาคาร 2 หลังใน Castle Crasher Playground
ผลการเรียนรู้
- ระบุวิธีใช้คำสั่ง turn_for เพื่อหมุนหุ่นยนต์ VR ไปทางขวาหรือซ้าย
- ระบุวิธีใช้คำสั่ง turn_to_heading เพื่อหมุนหุ่นยนต์ VR ไปยังทิศทางตามเข็มนาฬิกาที่กำหนด
เปลี่ยนชื่อโปรเจกต์
- หากยังไม่ได้โหลดโค้ดบทเรียนก่อนหน้า ให้โหลดโปรเจ็กต์ Unit2Lesson2
- เปลี่ยนชื่อโปรเจกต์โดยเลือกกล่องชื่อโปรเจกต์

- ป้อนชื่อโปรเจ กต์ใหม่Unit2Lesson3 และเลือก "บันทึก"

เลี้ยวขวาหรือซ้าย
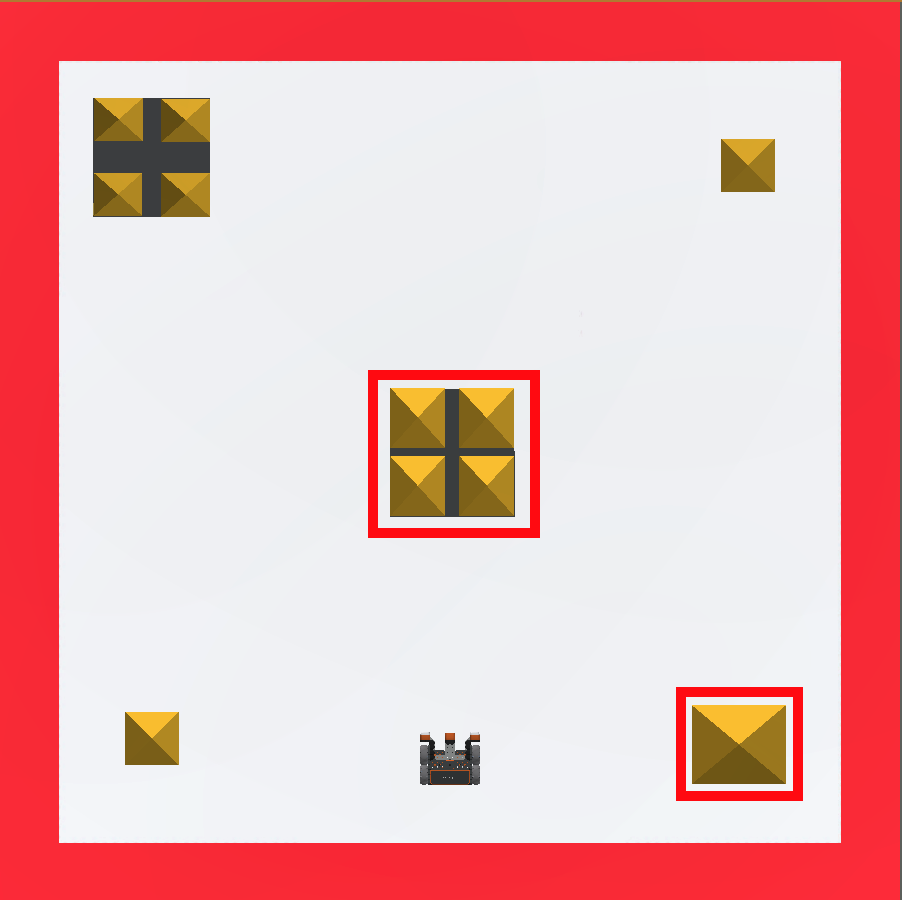
คำสั่ง turn_for จะหมุนหุ่นยนต์ VR ตามจำนวนองศาที่กำหนด ตัวอย่างนี้จะให้หุ่นยนต์ VR ขับไปข้างหน้าเพื่อล้มอาคารตรงกลาง จากนั้นถอยหลังกลับไปที่จุดเริ่มต้น จากนั้นเลี้ยวและล้มอาคารที่มุมล่างขวาบน Castle Crasher Playground
สำหรับข้อมูลของคุณ
หากต้องการให้หุ่นยนต์ VR หมุนด้วยความเร็วที่แตกต่างกัน สามารถเพิ่มหรือลดความเร็วในการหมุนได้โดยใช้คำสั่ง set_turn_velocity คำสั่ง set_turn_velocity ยอมรับช่วงตั้งแต่ 0 ถึง 100 สำหรับพารามิเตอร์ความเร็ว ความเร็วเริ่มต้นคือ 50% การเปลี่ยนความเร็วจะนำไปใช้กับคำสั่ง Drivetrain ที่ตามมา
drivetrain.set_turn_velocity (50, เปอร์เซ็นต์)-
ลากหรือพิมพ์คำสั่ง turn_for ใต้ คำสั่ง drive_ for ตั้งค่าพารามิเตอร์ของคำสั่ง turn_for เพื่อเลี้ยวขวา 90 องศา โปรเจ็กต์นี้มีคำสั่ง set_drive_velocity และ set_turn_velocity เพิ่มและตั้งค่าเป็น 100% โปรเจกต์ของคุณควรมีลักษณะดังนี้:
# เพิ่มรหัสโครงการใน "main" def main (): drivetrain.set_drive_velocity (100, PERCENT) drivetrain.set_turn_velocity (100, PERCENT) drivetrain.drive_for (FORWARD, 800, MM) drivetrain.drive_for (REVERSE, 800, MM) drivetrain.turn_for (RIGHT, 90, DEGREES) -
ลากเข้าหรือพิมพ์คำสั่ง drive_for ใต้คำสั่ง turn_for ตั้งค่าพารามิเตอร์ของคำสั่ง drive_for เพื่อขับไปข้างหน้า 700 มิลลิเมตร (มม.) โปรเจกต์ของคุณควรมีลักษณะดังนี้:
# เพิ่มรหัสโครงการใน "main" def main (): drivetrain.set_drive_velocity ( 100, PERCENT) drivetrain.set_turn_velocity (100, PERCENT) drivetrain.drive_for (FORWARD, 800, MM) drivetrain.drive_for (REVERSE, 800, MM) drivetrain.turn_for (RIGHT, 90, DEGREES) drivetrain.drive_for (FORWARD, 700, MM) - เลือกปุ่ม “เปิดสนามเด็กเล่น” เพื่อเปิด Castle Crasher Playground หากยังไม่ได้เปิดอยู่

- เลือกปุ่ม "เริ่ม" เพื่อทดสอบโปรเจกต์

-
ดูหุ่นยนต์ VR ขับไปข้างหน้าและชนกับอาคารตรงกลางก่อนที่จะย้อนกลับไปที่จุดเริ่มต้น จากนั้นหุ่นยนต์ VR จะเลี้ยวขวา 90 องศาและขับไปข้างหน้าเพื่อชนกับอาคารที่มุมขวาล่างของ Castle Crasher Playground

เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป