
Práctica
En la última sección, aprendiste a usar el sensor de distancia para medir la distancia, detectar objetos y su tamaño relativo, e informar la velocidad del objeto. Ha aprendido cómo funciona el sensor de distancia y cómo codificarlo con VEXcode EXP. En esta actividad, aplicarás lo que has aprendido para codificar tu robot para localizar una Buckyball y empujarla fuera del campo.
En la actividad de práctica, crearás un proyecto VEXCODE EXP para localizar una Buckyball y empujarla fuera del campo, asegurándote de que el robot en sí no se caiga del borde. Iterará en su proyecto para asegurarse de que el robot pueda completar esta tarea incluso si se cambia la posición inicial de la Buckyball. Mire el video a continuación para ver cómo puede aplicar lo que ha aprendido para completar la actividad de práctica Push it Off.
¡Ahora es tu turno de completar la actividad de práctica Push it Off!
En esta animación, el robot gira en la dirección de la Buckyball, se dirige hacia ella y la empuja fuera del campo. Luego, el robot y Buckyball se reinician, con Buckyball en una posición diferente esta vez. El robot gira hacia la Buckyball y la empuja fuera del campo. Esta animación muestra un ejemplo de cómo se puede crear un proyecto para completar la actividad Push it Off.
Utilice este documento como referencia para completar la actividad de práctica.
A medida que complete la actividad Push it Off, documente sus proyectos y pruebas en su cuaderno de ingeniería.
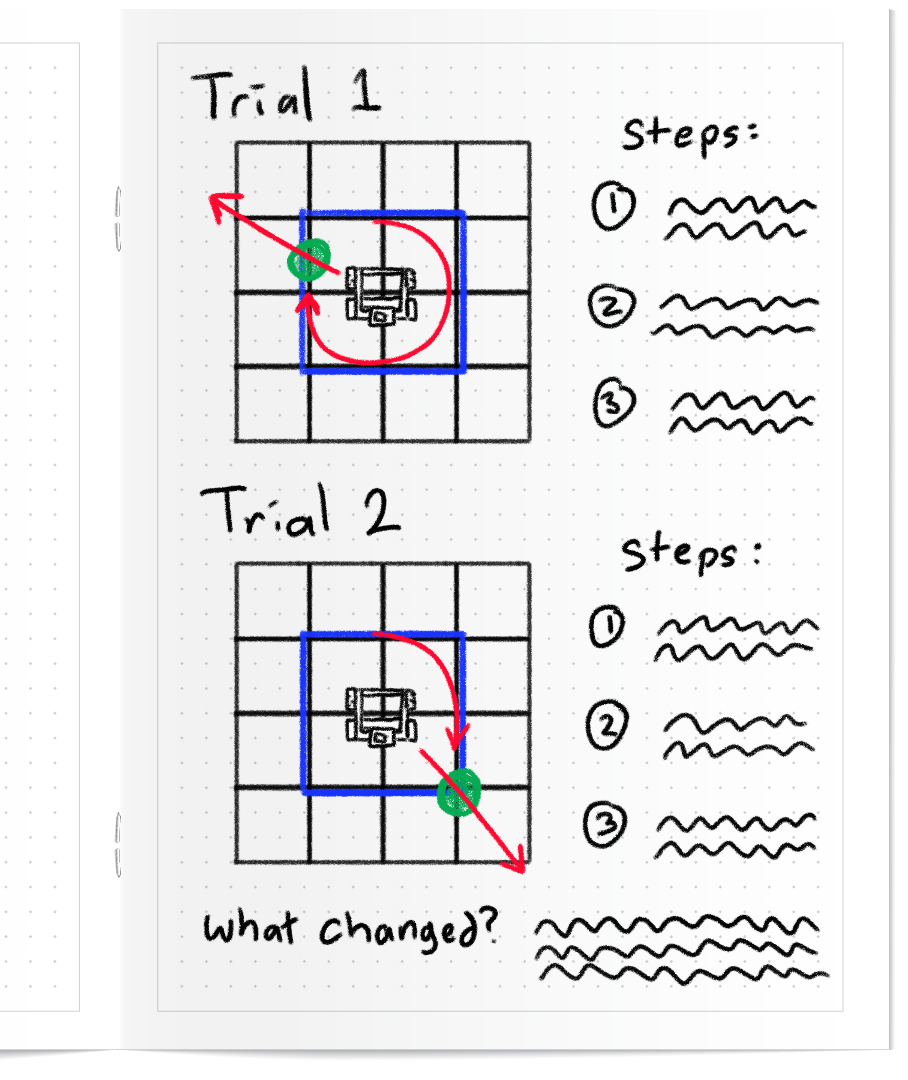
- Haz un dibujo para mostrar cómo debe moverse tu robot para completar la actividad
- Enumera los pasos necesarios para crear un proyecto basado en tu imagen
- Documente los cambios que realiza después de cada iteración
Vea la imagen de la izquierda para ver un ejemplo de cómo puede registrar las ideas y pruebas de su proyecto.
En Competir (en la página siguiente), codificarás tu robot para derribar cuatro Buckyballs del campo lo más rápido posible en el Sense and Sweep Challenge. Aprende a completar el desafío, comprueba tu comprensión y luego practica para el desafío.
El objetivo de este desafío es que tu robot empuje las cuatro Buckyballs fuera del campo lo más rápido posible, sin caerse del campo.
Mira esta animación para ver un ejemplo de cómo podría moverse tu robot para completar el desafío Sense and Sweep.
Sigue los pasos de este documento para obtener más información sobre cómo completar este desafío.
Compruebe su comprensión
Antes de comenzar el desafío, asegúrese de comprender las reglas y la configuración del desafío respondiendo las preguntas del siguiente documento en su cuaderno de ingeniería.
Comprueba tus preguntas de comprensión >
Después de completar las preguntas, intente practicar el desafío.
Selecciona Siguiente > para competir en el desafío Sense and Sweep.