
Praxis
Im letzten Abschnitt haben Sie gelernt, wie Sie den Abstandssensor verwenden, um die Entfernung zu messen, Objekte und ihre relative Größe zu erkennen und die Objektgeschwindigkeit zu melden. Sie haben gelernt, wie der Abstandssensor funktioniert und wie man ihn mit VEXcode EXP codiert. In dieser Aktivität wendest du an, was du gelernt hast, um deinen Roboter zu codieren, um einen Buckyball zu finden und ihn vom Feld zu schieben.
In der Übungsaktivität erstellen Sie ein VEXcode EXP-Projekt, um einen Buckyball zu lokalisieren und ihn vom Feld zu schieben, um sicherzustellen, dass der Roboter selbst nicht vom Rand fällt. Sie werden Ihr Projekt wiederholen, um sicherzustellen, dass der Roboter diese Aufgabe erfüllen kann, auch wenn die Ausgangsposition des Buckyballs geändert wird. Sehen Sie sich das Video unten an, um zu sehen, wie Sie das Gelernte anwenden können, um die Übung Push it Off abzuschließen.
Jetzt bist du an der Reihe, die Push it Off-Übungsaktivität abzuschließen!
In dieser Animation dreht sich der Roboter in Richtung Buckyball, fährt auf ihn zu und schiebt ihn vom Feld. Dann werden der Roboter und Buckyball zurückgesetzt, wobei sich der Buckyball diesmal in einer anderen Position befindet. Der Roboter dreht sich in Richtung Buckyball und schiebt ihn vom Feld. Diese Animation zeigt ein Beispiel dafür, wie ein Projekt erstellt werden kann, um die Push it Off-Aktivität abzuschließen.
Verwenden Sie dieses Dokument als Referenz, um die Übungsaktivität abzuschließen.
Wenn Sie die Push it Off-Aktivität abschließen, dokumentieren Sie Ihre Projekte und Tests in Ihrem technischen Notizbuch.
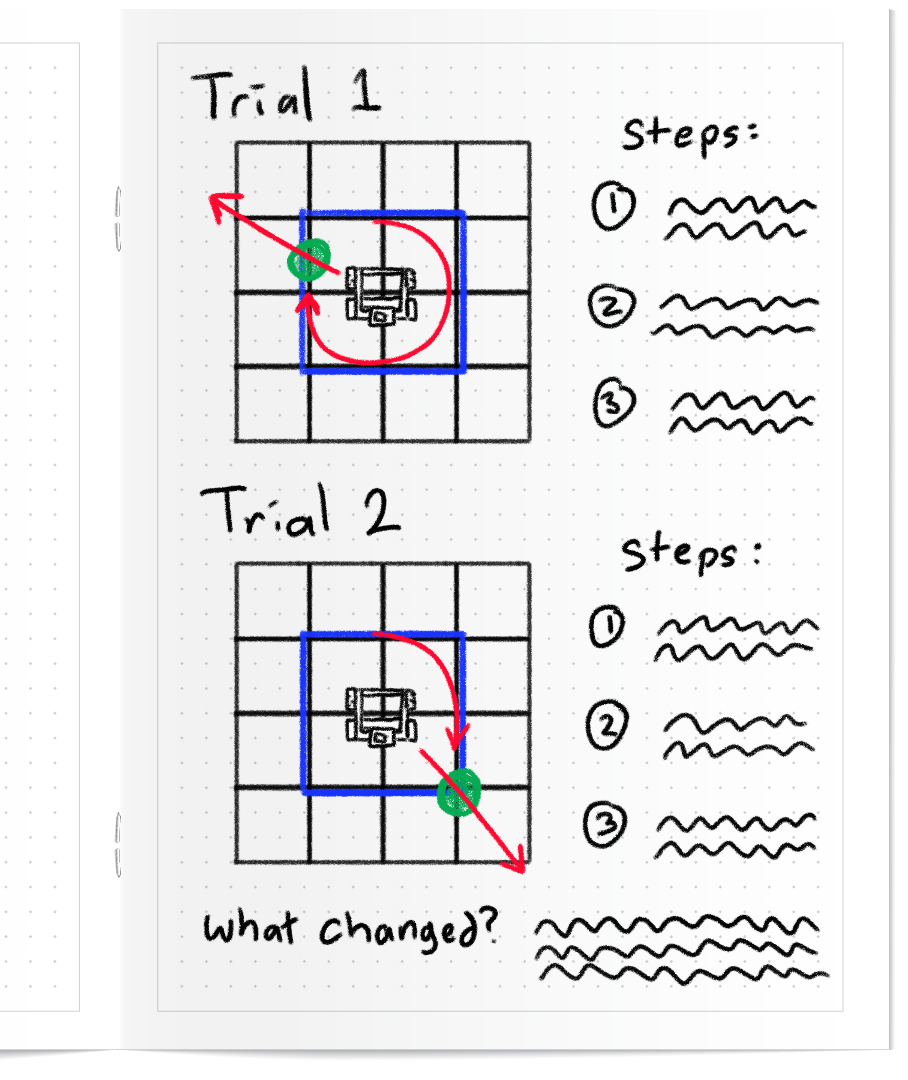
- Zeichnen Sie ein Bild, um zu zeigen, wie sich Ihr Roboter bewegen sollte, um die Aktivität abzuschließen
- Listen Sie die Schritte auf, die erforderlich sind, um ein Projekt basierend auf Ihrem Bild zu erstellen
- Dokumentieren Sie die Änderungen, die Sie nach jeder Iteration vornehmen
Sehen Sie sich das Bild auf der linken Seite an, um ein Beispiel dafür zu erhalten, wie Sie Ihre Projektideen und Tests aufzeichnen können.
In Compete (auf der nächsten Seite) kodierst du deinen Roboter, um in der Sense and Sweep-Herausforderung so schnell wie möglich vier Buckyballs vom Feld zu werfen. Lerne, wie du die Herausforderung meisterst, überprüfe dein Verständnis und übe dann für die Herausforderung.
Das Ziel dieser Herausforderung ist es, dass dein Roboter alle vier Buckyballs so schnell wie möglich vom Feld schiebt, ohne vom Feld zu fallen.
Sehen Sie sich diese Animation an, um ein Beispiel dafür zu sehen, wie sich Ihr Roboter bewegen könnte, um die Sense and Sweep-Herausforderung zu meistern.
Überprüfe dein Verständnis
Bevor Sie mit der Herausforderung beginnen, stellen Sie sicher, dass Sie die Regeln und den Aufbau der Herausforderung verstehen, indem Sie die Fragen im folgenden Dokument in Ihrem technischen Notizbuch beantworten.
Fragen zu deinem Verständnis prüfen >
Versuchen Sie nach Abschluss der Fragen, die Herausforderung zu üben.
Wähle Weiter aus > , um an der Sense and Sweep-Herausforderung teilzunehmen.