
Oefening
In het vorige gedeelte hebt u geleerd hoe u de afstandssensor kunt gebruiken om afstand te meten, objecten en hun relatieve grootte te detecteren en de snelheid van objecten te rapporteren. Je hebt geleerd hoe de afstandssensor werkt en hoe je deze kunt coderen met VEXcode EXP. In deze activiteit ga je toepassen wat je hebt geleerd om je robot te programmeren, zodat hij een Buckyball kan lokaliseren en deze van het veld kan duwen.
In de oefenactiviteit ga je een VEXcode EXP-project maken om een Buckyball te vinden en deze van het veld te duwen. Zorg er hierbij voor dat de robot zelf niet van de rand valt. U gaat uw project herhalen om ervoor te zorgen dat de robot deze taak kan voltooien, zelfs als de startpositie van de Buckyball wordt gewijzigd. Bekijk de onderstaande video om te zien hoe u kunt toepassen wat u hebt geleerd om de Push it Off-oefenactiviteit te voltooien.
Nu is het jouw beurt om de 'Duw het eraf'-oefenactiviteit te voltooien!
In deze animatie draait de robot in de richting van de Buckyball, rijdt ernaartoe en duwt hem van het veld. Vervolgens worden de robot en de Buckyball gereset, waarbij de Buckyball deze keer in een andere positie staat. De robot draait zich naar de Buckyball toe en duwt deze van het veld. Deze animatie toont een voorbeeld van hoe een project kan worden gemaakt om de Push it Off-activiteit te voltooien.
Gebruik dit document als referentie om de oefenactiviteit te voltooien.
Terwijl u de Push it Off-activiteit voltooit, documenteert u uw projecten en tests in uw technisch notitieboekje.
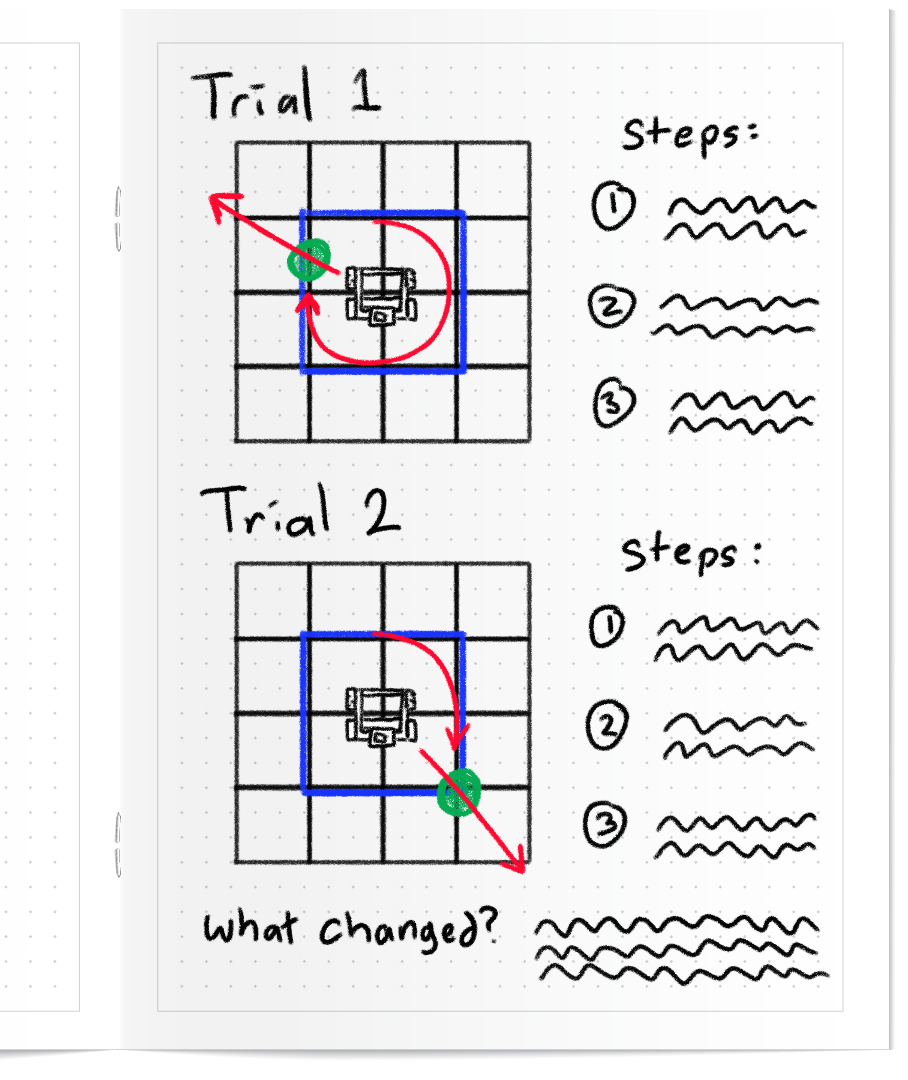
- Teken een plaatje om te laten zien hoe je robot moet bewegen om de activiteit te voltooien
- Maak een lijst van de stappen die nodig zijn om een project te maken op basis van uw foto
- Documenteer de wijzigingen die u na elke iteratie aanbrengt
Zie de afbeelding links voor een voorbeeld van hoe u uw projectideeën en tests kunt vastleggen.
In Compete (op de volgende pagina) programmeer je je robot om zo snel mogelijk vier Buckyballs van het veld te slaan in de Sense and Sweep Challenge. Ontdek hoe je de uitdaging voltooit, controleer je begrip en oefen vervolgens voor de uitdaging.
Het doel van deze uitdaging is om met je robot alle vier de Buckyballs zo snel mogelijk van het veld te duwen, zonder dat hij eraf valt.
Bekijk deze animatie om een voorbeeld te zien van hoe jouw robot kan bewegen om de Sense and Sweep Challenge te voltooien.
Volg de stappen in dit document om meer te weten te komen over hoe u deze uitdaging kunt voltooien.
Controleer uw begrip
Voordat u aan de uitdaging begint, moet u ervoor zorgen dat u de regels en de opzet van de uitdaging begrijpt door de vragen in het onderstaande document in uw technische notitieboekje te beantwoorden.
Nadat u de vragen hebt beantwoord, kunt u de uitdaging oefenen.
Selecteer Volgende > om mee te doen aan de Sense and Sweep Challenge.