
Pratique
Dans la dernière section, vous avez appris à utiliser le capteur de distance pour mesurer la distance, détecter les objets et leur taille relative et signaler la vitesse des objets. Vous avez appris comment fonctionne le capteur de distance et comment le coder à l'aide de VEXcode EXP. Dans cette activité, vous appliquerez ce que vous avez appris pour coder votre robot afin de localiser un Buckyball et le pousser hors du terrain.
Dans l'activité pratique, vous créerez un projet VEXcode EXP pour localiser un Buckyball et le pousser hors du terrain, en vous assurant que le robot lui-même ne tombe pas du bord. Vous allez itérer sur votre projet pour vous assurer que le robot peut terminer cette tâche même si la position de départ du Buckyball est modifiée. Regardez la vidéo ci-dessous pour voir comment vous pouvez appliquer ce que vous avez appris pour terminer l'activité pratique Push it Off.
C'est maintenant votre tour de terminer l'activité d'entraînement Push it Off !
Dans cette animation, le robot se tourne dans la direction du Buckyball, se dirige vers lui et le pousse hors du terrain. Ensuite, le robot et le Buckyball sont réinitialisés, avec le Buckyball dans une position différente cette fois. Le robot tourne vers le Buckyball et le pousse hors du terrain. Cette animation montre un exemple de la manière dont un projet peut être créé pour compléter l'activité Push it Off .
Utilisez ce document comme référence pour compléter l’activité pratique.
Au fur et à mesure que vous terminez l’activité Push it Off, documentez vos projets et tests dans votre carnet d’ingénierie.
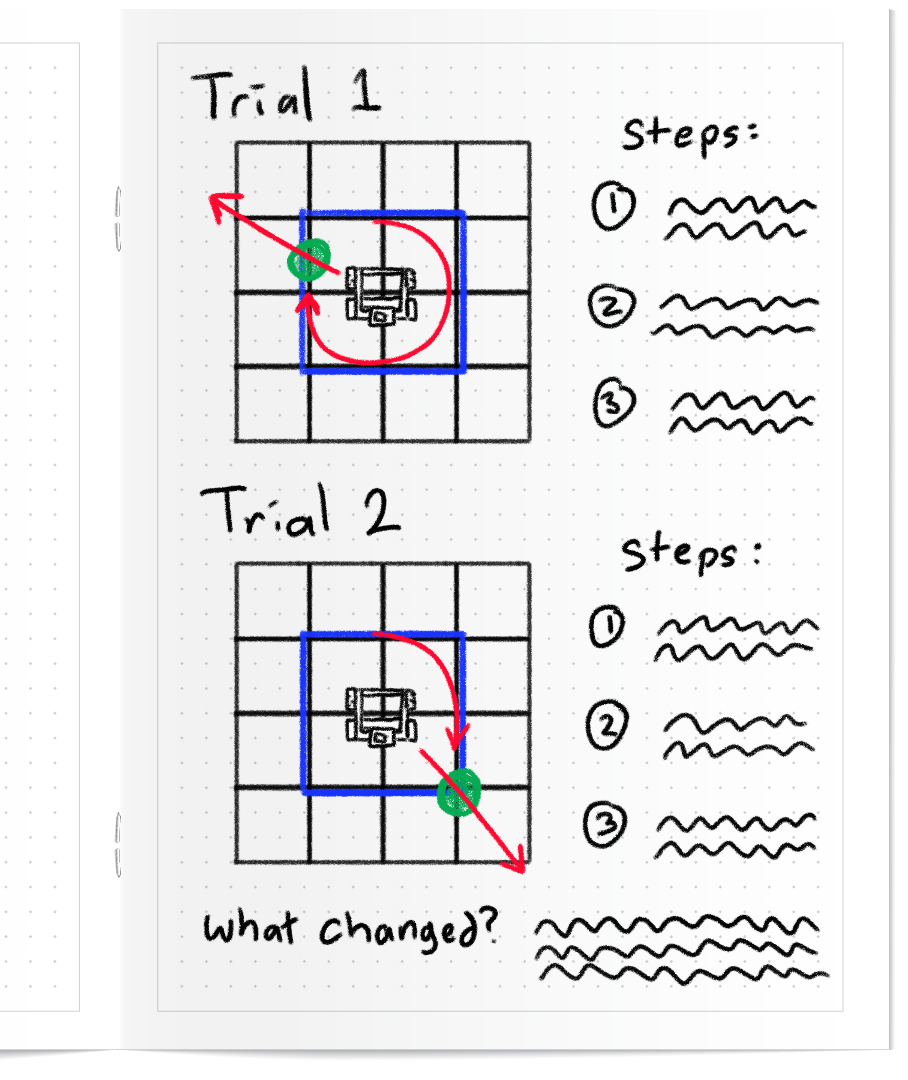
- Dessinez une image pour montrer comment votre robot doit se déplacer pour terminer l'activité
- Énumérez les étapes nécessaires pour créer un projet basé sur votre image
- Documentez les modifications que vous apportez après chaque itération
Consultez l’image sur la gauche pour un exemple de la manière dont vous pouvez enregistrer vos idées de projet et vos tests.
Dans Compete (sur la page suivante), vous coderez votre robot pour faire sortir quatre Buckyballs du terrain le plus rapidement possible dans le défi Sense and Sweep. Apprenez à relever le défi , vérifiez votre compréhension, puis entraînez-vous pour le défi.
Le but de ce défi est de faire en que votre robot pousse les quatre Buckyballs hors du terrain le plus rapidement possible, sans tomber du terrain.
Regardez cette animation pour voir un exemple de la façon dont votre robot pourrait se déplacer pour relever le défi Sense and Sweep.
Suivez les étapes de ce document pour en savoir plus sur la façon de relever ce défi.
Vérifiez votre compréhension
Avant de commencer le défi, assurez-vous de bien comprendre les règles et la configuration du défi en répondant aux questions du document ci-dessous dans votre cahier d'ingénierie.
Vérifiez vos questions de compréhension >
Après avoir répondu aux questions, essayez de pratiquer le défi.
Sélectionnez Suivant > pour participer au défi Sense and Sweep.