
Prática
Na última seção, aprendemos a usar o Sensor de Distância para medir a distância, detectar objetos e seu tamanho relativo e relatar a velocidade do objeto. Você aprendeu como o Sensor de Distância funciona e como codificá-lo usando o VEXcode EXP. Nesta atividade, você aplicará o que aprendeu para codificar seu robô para localizar um Buckyball e empurrá-lo para fora do campo.
Na atividade prática, você criará um projeto VEXcode EXP para localizar uma Buckyball e empurrá-la para fora do campo, certificando-se de que o próprio robô não caia da borda. Irá iterar o seu projeto para garantir que o robô pode concluir esta tarefa, mesmo que a posição inicial do Buckyball seja alterada. Assista ao vídeo abaixo para ver como pode aplicar o que aprendeu para concluir a atividade prática Push it Off.
Agora é a sua vez de concluir a Atividade de Prática Push it Off!
Nesta animação, o robô gira na direção do Buckyball, dirige em direção a ele e o empurra para fora do Campo. Em seguida, o robô e o Buckyball são reiniciados, com o Buckyball em uma posição diferente desta vez. O robô gira em direção ao Buckyball e o empurra para fora do Campo. Esta animação mostra um exemplo de como um projeto pode ser criado para concluir a atividade Push it Off.
Use este documento como referência para concluir a atividade prática.
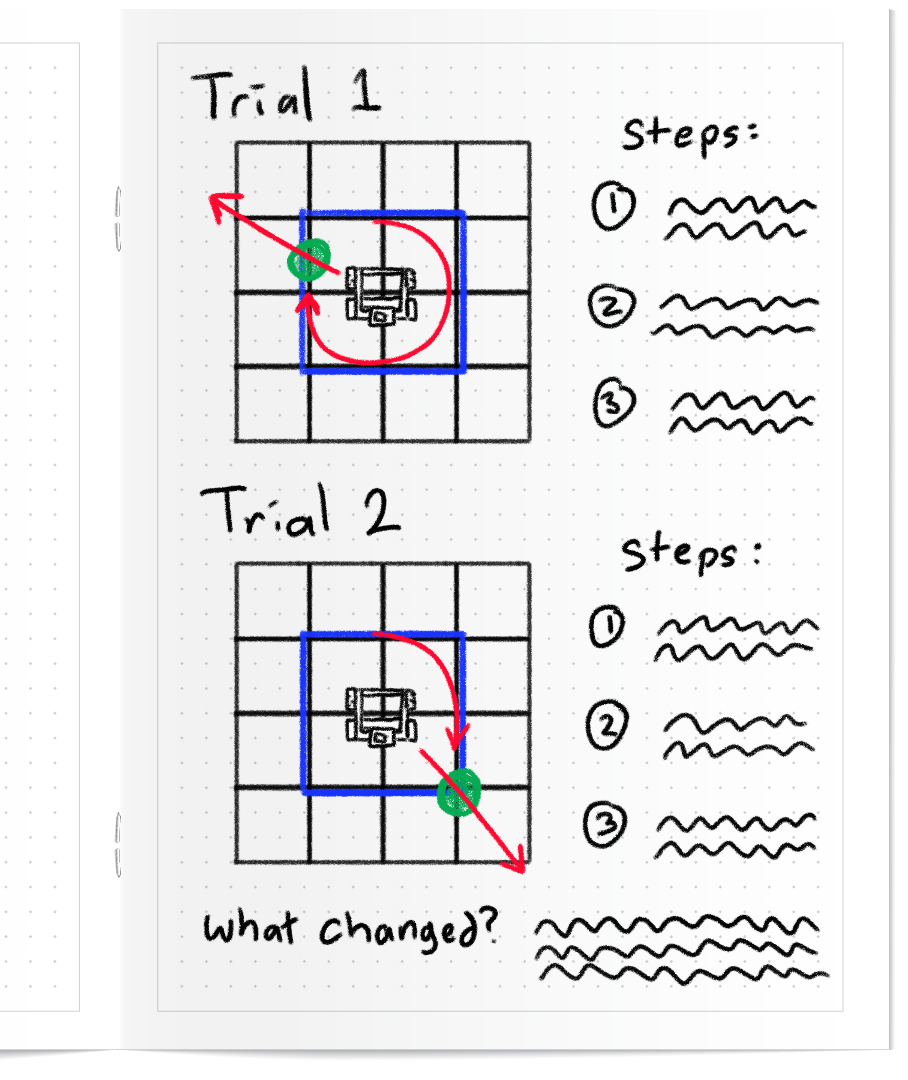
Ao concluir a atividade Push it Off, documente os seus projetos e testes no seu caderno de engenharia.
- Desenhe uma imagem para mostrar como o seu robot deve mover-se para concluir a atividade
- Liste as etapas necessárias para criar um projeto com base na sua imagem
- Documente as alterações feitas após cada iteração
Veja a imagem à esquerda para um exemplo de como você pode gravar as ideias e testes do seu projeto.
Em Competir (na próxima página), você codificará seu robô para tirar quatro Buckyballs do campo o mais rápido possível no Desafio Sentir e Varrer. Aprenda a completar o desafio, verifique a sua compreensão e, em seguida, pratique para o desafio.
O objetivo deste desafio é fazer com que seu robô empurre todas as quatro Buckyballs para fora do Campo o mais rápido possível, sem cair do Campo.
Assista a esta animação para ver um exemplo de como seu robô pode se mover para concluir o Desafio de Sentir e Varrer.
Siga as etapas deste documento para saber mais sobre como concluir este desafio.
Verifique a sua compreensão
Antes de iniciar o desafio, certifique-se de entender as regras e a configuração do desafio respondendo às perguntas do documento abaixo em seu caderno de engenharia.
Verifique as suas perguntas de compreensão >
Depois de concluir as perguntas, tente praticar o desafio.
Selecione Next > para competir no Sense and Sweep Challenge.