
El desafío de los datos de visión - Python
![]() Caja de herramientas para maestros
: el propósito del desafío de datos de visión
Caja de herramientas para maestros
: el propósito del desafío de datos de visión
El propósito del Desafío de datos de visión es garantizar que los estudiantes comprendan los datos recopilados de la instantánea del sensor de visión y cómo se calculan los valores de X e Y del centro. Sus estudiantes también deben terminar esta práctica con una comprensión de cómo se pueden interpretar esos datos (por ejemplo, el valor de la X central se puede usar para determinar dónde está el objeto en relación con el punto central del robot) y las mejores prácticas para nombrar objetos al configurar.

Complete el Desafío de datos de visión respondiendo las preguntas y completando los datos que faltan en su cuaderno de ingeniería.
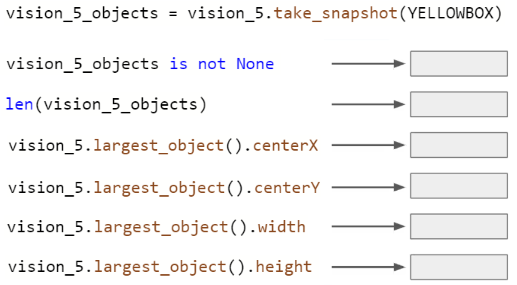
- ¿Cuál de estas instrucciones se utilizó para tomar la instantánea anterior?
-
vision_5.take_snapshot(REDBOX) -
vision_5.take_snapshot(YELLOWBOX)
-
-
Complete estos valores:
- ¿YELLOWBOX está a la izquierda o a la derecha del punto central del robot?
- ¿YELLOWBOX está por encima o por debajo del punto central del robot?
- YELLOWBOX NO es el mejor nombre para dar a este objeto si desea reconocer fácilmente qué firma de color es cuál. ¿Cuál de estos es un mejor nombre? ¿Por qué?
- YELLOWGEAR
- YELLOWCUBE
![]() Caja de herramientas para maestros
-
Respuestas
Caja de herramientas para maestros
-
Respuestas
Las respuestas de los estudiantes se pueden discutir en clase y/o puede revisar sus cuadernos de ingeniería para asegurarse de que completaron la actividad con éxito.
-
vision_5.take_snapshot(YELLOWBOX) 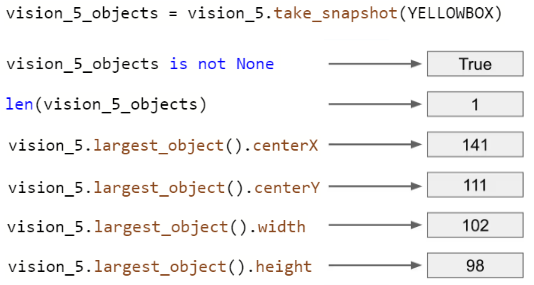
- YELLOWBOX está ligeramente a la izquierda del punto central del robot, pero solo con una diferencia de 16,5 píxeles (centro 157,5 - 141).
- YELLOWBOX es ligeramente inferior al punto central del robot, pero solo por una diferencia de 5,5 píxeles (111 - centro 105,5).
-
A. YELLOWGEAR
Este es un mejor nombre porque describe no solo el color del objeto sino también el tipo de objeto. Es un engranaje, no una caja o cubo.
![]() Amplíe su aprendizaje
:
use las instrucciones de detección dentro de un proyecto
Amplíe su aprendizaje
:
use las instrucciones de detección dentro de un proyecto
Ahora que algunos de los datos informados por el sensor de visión se entienden mejor, es posible que los estudiantes quieran usar estas instrucciones de detección dentro de un proyecto. Permíteles explorar la posibilidad de hacerlo.
def check_red_callback():
brain.screen.set_font(FontType.MONO40)
brain.screen.clear_row(3)
brain.screen.set_cursor(3, 1)
vision_5_objects = vision_5.take_snapshot(REDBOX)
if (vision_5_objects):
brain.screen.print("Red Object Found")
brain.screen.next_row()
brain.screen.print("Number of Objects Detected:", len(vision_5_objects))
brain.screen.next_row()
brain.screen.print("Center X:", vision_5.largest_object().centerX)
brain.screen.next_row()
brain.screen.print("Center Y:", vision_5.largest_object().centerY)
brain.screen.next_row()
brain.screen.print("Width:", vision_5.largest_object().width)
brain.screen.next_row()
brain.screen.print("Height:", vision_5.largest_object().height)
brain.screen.next_row()
else:
brain.screen.print("No Red Object")Los estudiantes más avanzados podrían usar estas instrucciones dentro de un proyecto para tomar decisiones.
while True:
drivetrain.drive(FORWARD)
vision_5_objects = vision_5.take_snapshot(REDBOX)
if (vision_5_objects) and (vision_5.largest_object().centerX < 157.5):
drivetrain.turn_for(LEFT, 90, DEGREES)
else:
drivetrain.turn_for(RIGHT, 90, DEGREES)
wait(5, MSEC)