
![]() Opettajan työkalupakki
-
Tämän toiminnon tarkoitus
Opettajan työkalupakki
-
Tämän toiminnon tarkoitus
Edellisellä sivulla opiskelija ohjelmoi kättä pyörimään ylös käyttämällä Brain Up -painiketta. Tämä sivu perustuu edelliseen projektiin ohjelmoidakseen myös käsivarren pyörimään alas Brain Down -painikkeella.
Tämä aktiviteetti tutustuttaa opiskelijat ohjelmointiin [If then else] lohkolla sekä anturi- ja operaattorilohkojen avulla robotin tarkistamiseksi, onko aivot ylös- tai alas-painikkeita painettu. Jos Brain Up -painiketta painetaan, Clawbotin käsi nousee ylös. Jos Brain Down -painiketta painetaan, Clawbotin käsi laskeutuu. Tämä perustuu edelliseen toimintaan ja luo pohjan myös Uudelleenajattelua-osiossa olevalle User Interface Challenge -haasteelle.
Käyttöliittymähaastetta varten oppilaiden tulee ohjelmoida Clawbot nostamaan käsivartta, laskemaan käsivartta, avaamaan kynsi ja sulkemaan kynsi käyttämällä IQ Robot Brainin painikkeita.
Lisätietoja [If then], [If then else], <Brain-painikkeen painamisesta>, tai [Spin] -lohkoista on VEXcode IQ:n ohjetiedoissa. Saat lisätietoja tästä sisäänrakennetusta ohjetyökalusta napsauttamalla tästä.
Seuraavassa on pääpiirteet siitä, mitä oppilaasi tekevät tässä toiminnassa:
-
Käytä olemassa olevaa ArmUp2:ta ArmUpDown -projektin rakentamiseen ja ennusta, mitä projekti tekee.
-
Katso vuokaavio, joka auttaa selittämään lohkojen kulkua projektissa.
-
Tarkenna heidän selityksiään siitä, mitä ArmUpDown -projekti tekee.
-
Katso If Then Else Blocks -opetusvideo.
-
Muokkaa heidän projektiaan käyttämällä [Jos sitten muuten] lohkoa.
-
Pysähdy ja keskustele: Oppilaat pohtivat ennusteitaan siitä, mitä Clawbot tekee projektissa verrattuna heidän todellisiin havaintoihinsa.
-
Ohjelmoi kynsi käyttämällä samoja projektin ääriviivoja kuin käsivarren ohjelmoinnissa.
| Määrä | Tarvittavat materiaalit |
|---|---|
| 1 |
VEX IQ Super Kit |
| 1 |
VEXcode IQ |
| 1 |
Tekninen muistikirja |
| 1 |
Clawbot (voimansiirto) -malli |
Clawbot-käsivarsi on valmis liikkumaan ylös ja alas!
Tämä toiminta antaa sinulle työkalut ohjelmoidaksesi robottisi ehdolliseen käyttäytymiseen.
[Jos sitten else] -lohko on toiminnan pääpainopiste, mutta myös muita Tunnistus-, Ohjaus- ja Käyttäjä-lohkoja käytetään.

Voit käyttää VEXcode IQ:n ohjetietoja saadaksesi lisätietoja lohkoista. Katso ohjeita Help -ominaisuuden käyttämiseen Ohjeen käyttö -oppaasta.

![]() Opettajan vinkkejä
Opettajan vinkkejä
Jos tämä on ensimmäinen kerta, kun opiskelija käyttää VEXcode IQ:ta, hän näkee myös työkalupalkin opetusohjelmat muiden perustaitojen oppimiseksi.

Vaihe 1: Ohjelmointi liikuttamaan kättä alas.
Edellisellä sivulla ohjelmoit Clawbotin käsivarren pyörimään ylös, kun Brain Up -painiketta painettiin. Mutta entä myös käsivarren laskeminen? Käydään ensin uudelleen läpi aikaisempi ArmUp2-projekti.
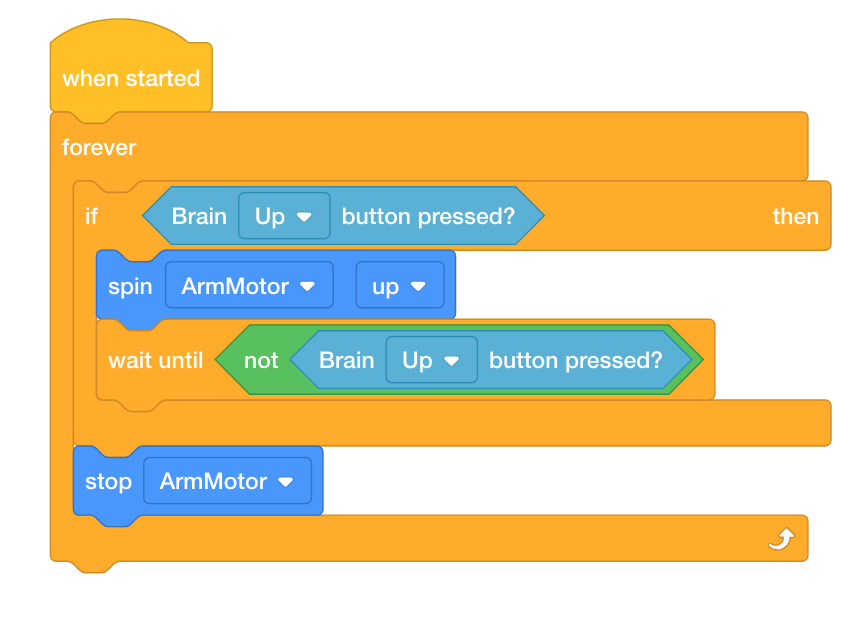
Olisiko mahdollista käyttää samaa [Jos sitten] -lohkoa käden pyörittämiseen ylös myös käsivarren pyörittämiseen alaspäin? Kokeillaan! Rakenna alla oleva projekti muokkaamalla jo olemassa olevaa ArmUp2-projektiasi.
-
Tallenna projekti nimellä ArmUpDown. Jos opiskelijat tarvitsevat apua projektin tallentamisessa, katso Nimeäminen ja tallennus -opas.

-
Tarkista, että projektin nimi ArmUpDown on nyt työkalupalkin keskellä olevassa ikkunassa.
-
Ennusta, mitä projekti saa Clawbotin tekemään suunnittelumuistikirjassasi. Selitä sekä käyttäjän että Clawbotin käyttäytyminen.
-
Testaa, pitääkö ennustuksesi siitä, mitä Clawbot tekee projektissa oikein.
-
Lataa projekti -paikkaan 3 Clawbotissa ja suorita se sitten.
-
Jos tarvitset apua projektin lataamisessa ja suorittamisessa, katso VEXcode IQ:n opetusohjelma, joka selittää kuinka projekti ladataan ja suoritetaan.

-
-
Tarkista projektin selitykset ja korjaa ne tarvittaessa.
![]() Opettajan työkalupakki
Opettajan työkalupakki
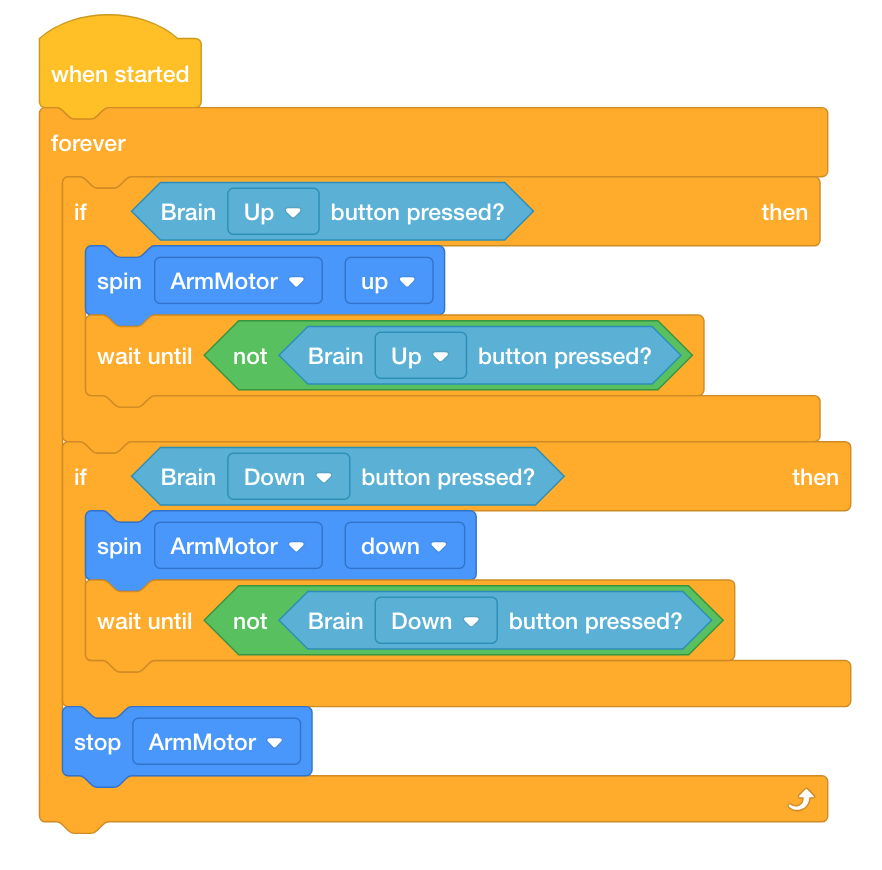
Projekti, jonka opiskelijat rakentavat yllä, toimii. Kun Brain Up -painiketta painetaan, käsi kääntyy ylös ja kun Brain Down -painiketta painetaan, käsi pyörii alas. Vaikka projekti toimii sellaisenaan, sitä ei ole kirjoitettu optimaalisesti. Saattaa olla tapaus, jossa molemmat ehdot voivat olla tosia samanaikaisesti. Huomaa myös, että koska Brain Up -painiketta painetaan ensin, jos Brain Up -painiketta pidetään painettuna ja sitten myös Brain Down -painiketta painetaan, käsi jatkaa pyörimistä ylöspäin. Tämä toiminta ei lopu ennen kuin Brain Up -painike vapautetaan. Siten projekti kirjoitetaan uudelleen seuraavassa vaiheessa sisältämään [If then else] -lohko näiden mahdollisten ongelmien välttämiseksi.
![]() Opettajan työkalupakki
-
Pysähdy ja keskustele
Opettajan työkalupakki
-
Pysähdy ja keskustele
Nyt kun opiskelijat ovat testanneet projektia, kysy heiltä, kuinka heidän ennusteensa verrattuna heidän havaintoihinsa. Helpota keskustelua esittämällä seuraavat kysymykset:
-
Oliko ennustuksesi sama kuin havaintosi?
-
Mitä projektissa näyttää tapahtuvan?
-
Tarkistetaanko Ylös- ja Alas-painikkeiden olosuhteet vain kerran?
-
Voisiko projekti mielestäsi järjestää uudelleen tehokkaammaksi?
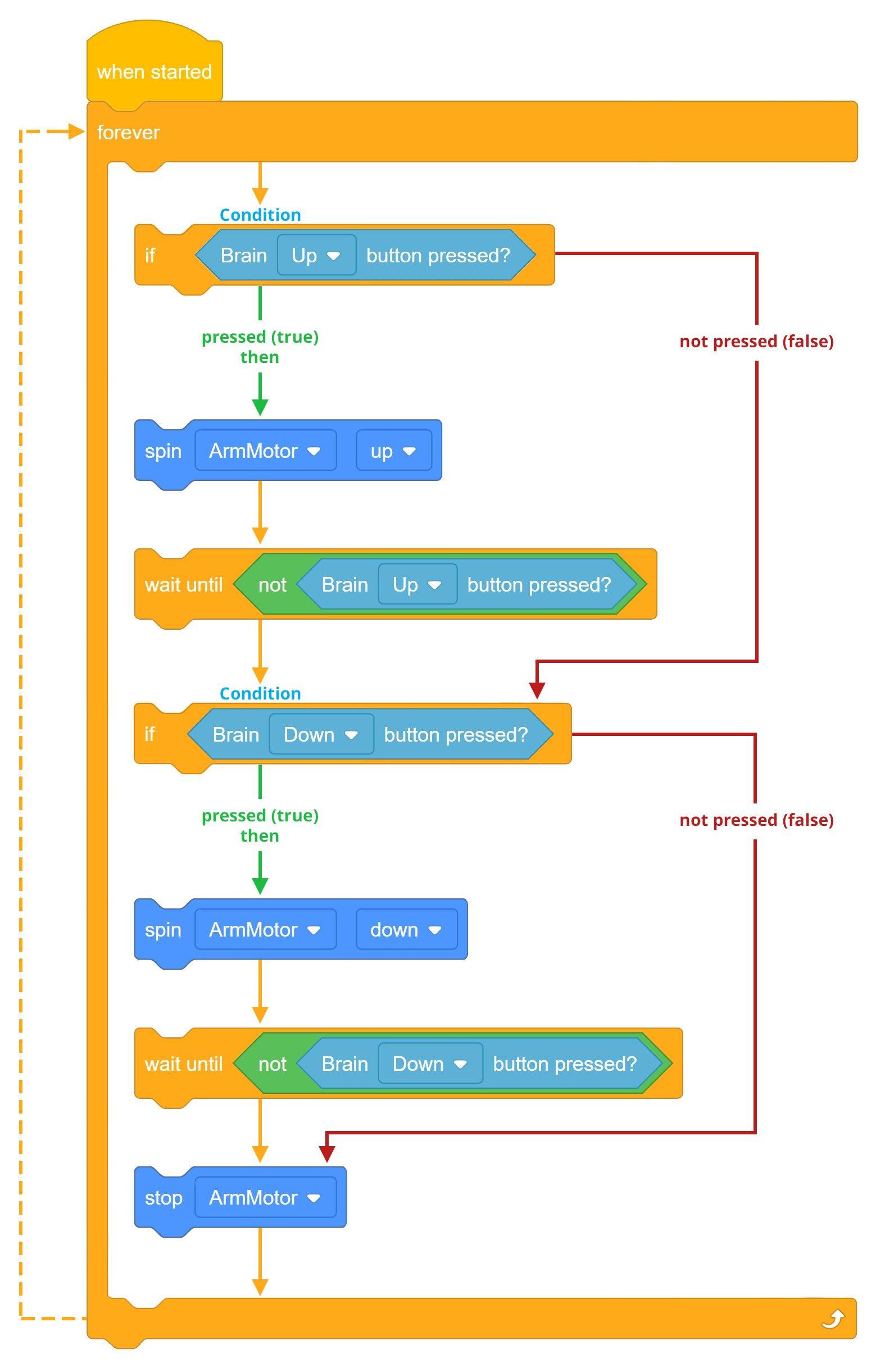
Vaihe 2: Projektin kulun ymmärtäminen.
Edellisessä vaiheessa projekti nosti ja laski käsivartta. Kuitenkin, koska Brain Up -painiketta painetaan ensin, jos Brain Up -painiketta pidetään painettuna ja sitten myös Brain Down -painiketta painetaan, käsi jatkaa pyörimistä ylös, koska tämä toiminta ei pysähdy ennen kuin aivot ylös -painiketta. on ilmestynyt. Katso seuraava vuokaavio, joka selittää projektin kulun.
Siten projekti voi korvata [If then] -lohkot [If then else] -lohkoilla, jolloin vain yksi ilmentymä voi olla tosi kerrallaan.
Katso seuraava opetusvideo [If then else] -lohkoista:
Aloita katsomalla If-Then-Else opetusvideo VEXcode IQ:ssa.
[Jos sitten muuten] -lohkojen käyttäminen poistaa myös [Odota, kunnes]-lohkojen tarpeen, koska käsivarsi jatkaa pyörimistä, kunnes Brain Up -painike vapautetaan. Tämä johtuu siitä, että [If then else] n "else"-osaa ei saavuteta koskaan ennen kuin Brain Up -painikkeen ehto on epätosi (vapautettu).
[Forever] -lohko mahdollistaa ensimmäisen ehdon jatkuvan tarkistamisen.
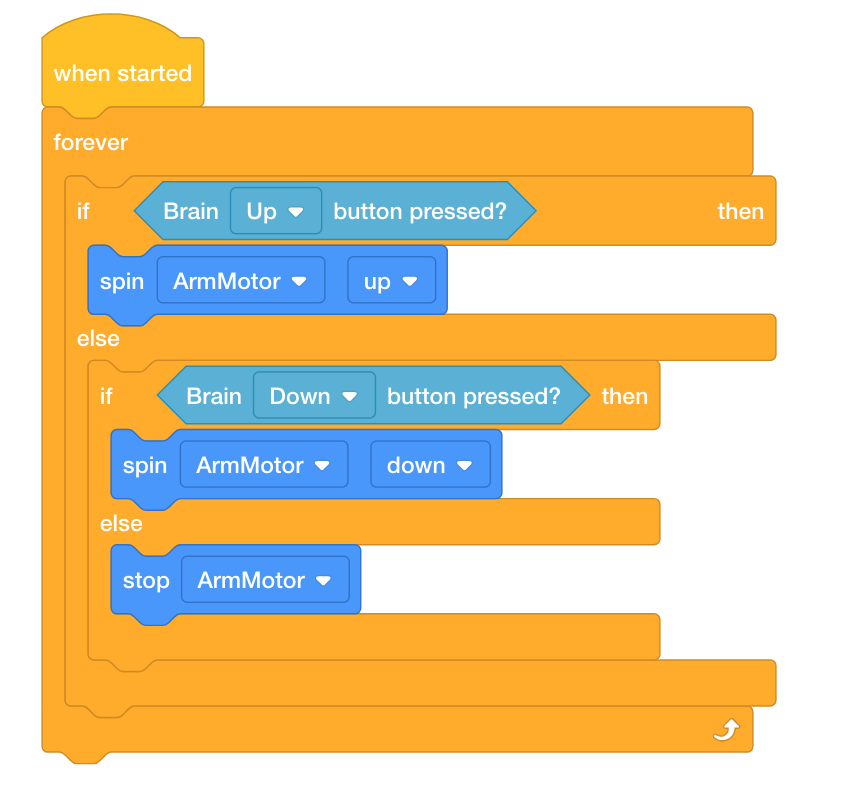
Tutkitaan projektin muuttamista lisäämällä [If then else] lohkoa. Arm Motor jatkaa nyt pyörimistä, kunnes Brain Up -painiketta ei enää paineta (vapautetaan). [Forever] -lohkon vuoksi tämän ehdon tarkistamista jatketaan, kunnes se on epätosi.
Kun Brain Up -painikkeen ehto on epätosi, projekti jatkaa seuraavaan lohkoon, joka on tilan tarkistaminen, jos Brain Down -painiketta painetaan. Jos Brain Down -painikkeen painamisen tila on totta, käsi nousee ylös. Jälleen [Forever] -lohkon vuoksi tämän ehdon tarkistamista jatketaan, kunnes se on epätosi.
Kun Brain Up -painikkeen ehto on epätosi, projekti jatkuu seuraavaan lohkoon, joka on [Stop motor] -lohko. Siten varsimoottori pysähtyy vain, kun molemmat ehdot ovat vääriä (kumpaakaan painiketta ei paineta).

![]() Motivoi keskustelua
Motivoi keskustelua
K: Mikä on projektikulun eteneminen, jos Brain Up -painikkeen tila on EPÄTOSI (vapautettu)?
A: Jos ehto on epätosi, projektikulku jatkaa painettavan Brain Down -painikkeen tilan tarkistamista.
K: Mikä on [Jos sitten muuten] lohkon tarkoitus yllä olevassa projektissa?
A: [Jos sitten else]-lohkojen käyttö sallii vain yhden esiintymän olevan tosi kerrallaan. Siten Brain Up -painike ja Brain Down -painikkeet eivät voi olla tosia samanaikaisesti [If then else] -lohkoja käytettäessä, koska Brain Down -painikkeen painamisen toinen ehto ei olisi edes vaihtoehto, ellei toiminnon ensimmäinen ehto ole. Brain Up -painikkeen painaminen oli väärä. Toinen tarkoitus on parantaa ohjelmoinnin tehokkuutta.
K: Mikä on projektin kulku, jos molemmat Ylös- ja Alas-painikkeiden ehdot ovat vääriä?
A: Jos molemmat ehdot ovat vääriä, projektin kulku jatkuu [Stop motor] -lohkoon ennen kuin palaa pinon yläosaan toistaen ikuisesti.
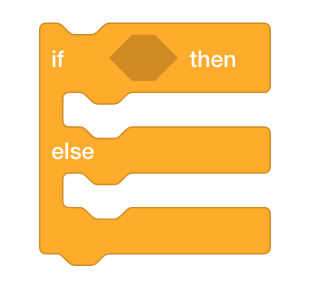
Vaihe 3: Ohjelmointi [If then else] lohkolla.
Käytetään [Jos sitten else] -lohkoja:
-
Lisää [If then else] -lohkot ArmUpDown-projektiisi, jotta projektisi näyttää seuraavalta:
-
Tallenna projekti nimellä ArmUpDown2. Jos opiskelijat tarvitsevat apua projektin tallentamisessa, katso Nimeäminen ja tallennus -opas.

-
Lataa projekti paikkaan 4 Clawbotissa ja suorita se sitten.
-
Jos tarvitset apua projektin lataamisessa ja suorittamisessa, katso VEXcode IQ:n opetusohjelma, joka selittää projekti ladataan ja suoritetaan.
-
Testaa, pyöriikö käsi nyt ylös, kun Brain Up -painiketta painetaan, ja alaspäin, kun Brain Down -painiketta painetaan.
-
Varmista, että kun Brain Up- ja Down -painikkeita ei paineta (vapautetaan), että Arm Motor pysähtyy.
-
Kirjoita havainnot siitä, kuinka Clawbot käyttäytyi ennen ja jälkeen jos sitten else -lohkojen lisäämisen projektiisi suunnittelumuistikirjaasi.
![]() Opettajan työkalupakki
-
Pysähdy ja keskustele
Opettajan työkalupakki
-
Pysähdy ja keskustele
Kun oppilaat ovat testanneet projektia ennen [If then else] -lohkon lisäämistä ja sen jälkeen, keskustele opiskelijoiden kanssa, kuinka tämä antaa käsivarren jatkaa pyörimistä, kunnes Brain Up -painike vapautetaan. Pyydä oppilaita kertomaan havainnoistaan suunnittelumuistikirjoistaan. Helpota keskustelua esittämällä seuraavat kysymykset:
-
Näetkö Clawbotin käyttäytyvän eri tavalla [If then else] -lohkojen käytön välillä verrattuna vain [If then] -lohkoihin?
-
Miksi ohjelman tehokkuus on mielestäsi tärkeää?
-
Tarkistetaanko Brain Up -painikkeen kunto vain kerran projektissa?
Opiskelijoiden tekniikan muistikirjoja voidaan ylläpitää ja pisteyttää yksittäin (Google / .docx / .pdf) tai tiiminä (Google / .docx / .pdf). Edellisissä linkeissä on erilainen rubriikki jokaiselle lähestymistavalle. Aina kun rubriikki sisällytetään koulutussuunnitteluun, on hyvä käytäntö selittää rubriikki tai ainakin antaa kopiot opiskelijoille ennen toiminnan alkamista.
![]() Opettajan työkalupakki
Opettajan työkalupakki
Opiskelijat eivät välttämättä näe suurta eroa Clawbotin käyttäytymisessä [If then else] -lohkojen ja [If then] -lohkojen välillä. Jos opiskelijat eivät fyysisesti näe suurta eroa, keskustele ohjelmoinnin tehokkuudesta ja siitä, kuinka projektin yksinkertaistaminen voi johtaa lohkojen vähentämiseen. Vähemmän lohkojen käyttö projektissa voi vähentää mahdollisten virheiden määrää.
Vaihe 4: Kynnen ohjelmointi.
Edellisessä vaiheessa projekti optimoitiin toimimaan tehokkaammin käyttämällä [If then else] -lohkoa. Edellisessä esimerkissä käsivartta käsiteltiin Brain Up- ja Down -painikkeilla.
Käyttämällä täsmälleen samaa projektin ääriviivaa, kynsiä voidaan myös manipuloida.
-
Tarkista ArmUpDown2-projekti ja muuta [Spin] -lohkot ClawMotoriksi ArmMotorin sijaan käyttämällä pudotusvalikkoa.
Varmista, että Brain Up -painike pyörittää Claw "avoin" ja että Brain Down -painike pyörittää Claw "sulkea" käyttämällä pudotusvalikoita.

-
Tallenna projekti nimellä ClawUpDown. Jos opiskelijat tarvitsevat apua projektin tallentamisessa, katso Nimeäminen ja tallennus -opas.

-
Lataa projekti -paikkaan 1 Clawbotissa ja suorita se sitten.
-
Jos tarvitset apua projektin lataamisessa ja suorittamisessa, katso VEXcode IQ:n opetusohjelma, joka selittää projekti ladataan ja suoritetaan.
-
Testaa, pyöriikö kynsi nyt auki, kun Brain Up -painiketta painetaan, ja pyöriikö kiinni, kun Brain Down -painiketta painetaan.
-
Varmista, että kynsimoottori pysähtyy, kun Brain Up- ja Down -painikkeita ei paineta (vapauta).
-
Kirjoita havainnot siitä, kuinka Clawbot käyttäytyi ennen ja jälkeen jos sitten else -lohkojen lisäämisen projektiisi suunnittelumuistikirjaasi.
![]() Opettajan työkalupakki
Opettajan työkalupakki
Nyt kun oppilailla on taidot käsitellä käsivartta ja kynsiä painikkeilla, pyydä oppilaita miettimään, kuinka he voivat suorittaa kaikki neljä toimintoa samassa projektissa (käsi ylös, käsi alas, kynsi auki ja kynsi kiinni).
Oppilaat käyttävät toista [jos sitten muuten] -lohkoa uudelleenarviointiosiossa, jotta heidän robottinsa voi suorittaa kaikki neljä toimintoa.
![]() Laajenna oppimistasi
-
Aseta moottorin pysäytyskappale
Laajenna oppimistasi
-
Aseta moottorin pysäytyskappale
Jos opiskelijat ohjelmoivat robottinsa nostamaan ja laskemaan käsivartta, kynnen paino voi saada käden ajautumaan alas.
Tässä tapauksessa [Set motor stopping] -lohkoa voidaan käyttää, jotta varsi ei putoa painovoiman ja kynnen painon vaikutuksesta. Tätä lohkoa voidaan käyttää projektin alussa ja sitä sovelletaan kaikkiin tuleviin moottorilohkoihin koko projektin ajan.

Asetetussa moottorin pysäytyslohkossa on kolme asetusta:
-
Jarru saa moottorin pysähtymään välittömästi.
-
Coast antaa moottorin pyöriä vähitellen pysähtymiseen.
-
Hold saa moottorin pysähtymään välittömästi ja palauttaa sen pysäytysasentoon, jos sitä liikutetaan.