
रोबोट व्यवहार - C++
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
जैसा कि पहले बताया गया है, व्यवहार रोबोट की क्रियाओं के बारे में बात करने का एक तरीका है। छात्रों को व्यवहार के बारे में सोचने और क्रियाओं को एक क्रम में व्यवस्थित करने का एक तरीका यह है कि छात्रों कोटिप्पणियाँउपयोग करके अपने प्रोजेक्ट के विभिन्न भागों को लेबल करने के लिए कहा जाए। छात्र पूरे प्रोजेक्ट में चुनौतियों से अलग-अलग व्यवहारों को लेबल कर सकते हैं।
टैग खेलने की एक सरल उदाहरण चुनौती पर विचार करें। छात्रों से कहा गया कि वे रोबोट को इस प्रकार प्रोग्राम करें कि वह टैग होने से बचने के लिए तेजी से घूमे, किसी को टैग करने के लिए धीरे-धीरे चले, तथा फिर भागने के लिए तेजी से घूमे। व्यवहार के अनुक्रम का वर्णन करने के लिएटिप्पणियाँका उपयोग करने का नीचे दिया गया उदाहरण देखें:
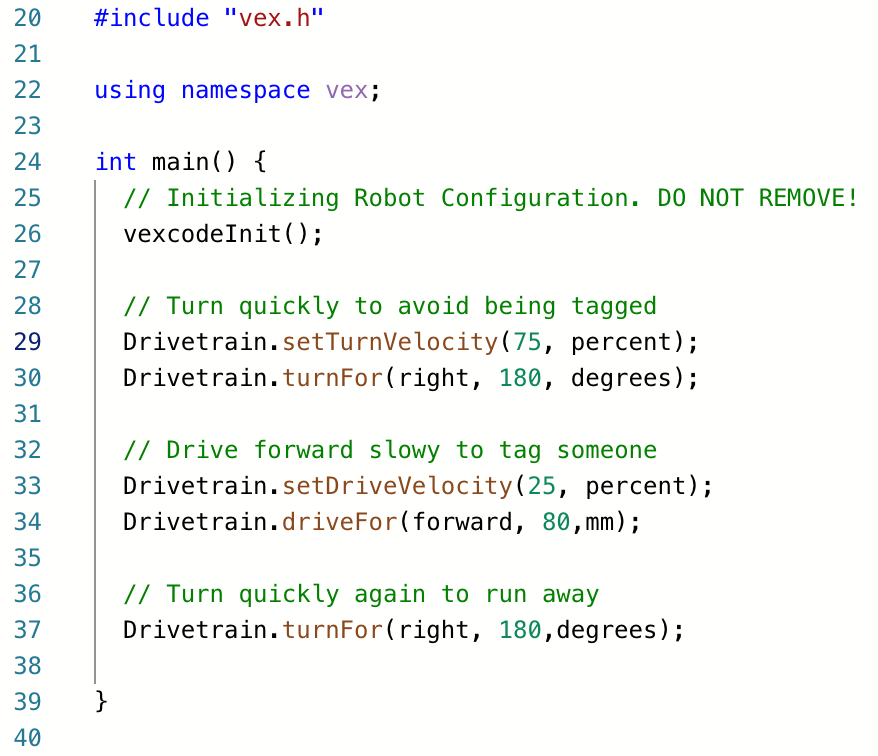
ध्यान दें कि व्यवहार का वर्णन सरल भाषा में है और टिप्पणियाँ बड़े व्यवहार (टैग खेलना) के एकल घटकों (जैसे, तेज़ी से मुड़ना, धीरे-धीरे आगे बढ़ना, और धीरे-धीरे मुड़ना) को पकड़ती हैं।
छात्रों से यह समझाने के लिए कहना अच्छा अभ्यास है कि वे इन चुनौतियों के लिए कैसे योजना बनाएंगे, इस संदर्भ में कि वे रोबोट से कैसा व्यवहार चाहते हैं और कैसे उम्मीद करते हैं।