
로봇 동작 - C++
![]() 교사 팁
교사 팁
앞서 언급했듯이, 행동은 로봇의 행동을 설명하는 방법입니다. 학생들이 행동에 대해 생각하고 활동을 순서대로 정리하도록 하는 한 가지 방법은 학생들이 프로젝트의 각 부분에comments사용하여 레이블을 붙이는 것입니다. 학생들은 프로젝트 전반에 걸쳐 과제에서 나타나는 다양한 행동에 이름을 붙일 수 있습니다.
술래잡기 놀이라는 간단한 과제의 예를 생각해 보세요. 학생들은 로봇이 태그를 피하기 위해 빠르게 방향을 바꾸고, 천천히 운전해서 누군가를 태그한 후, 다시 빠르게 방향을 바꿔 도망가도록 프로그래밍해야 합니다. 아래 예시에서댓글사용하여 동작 순서를 설명해보세요.
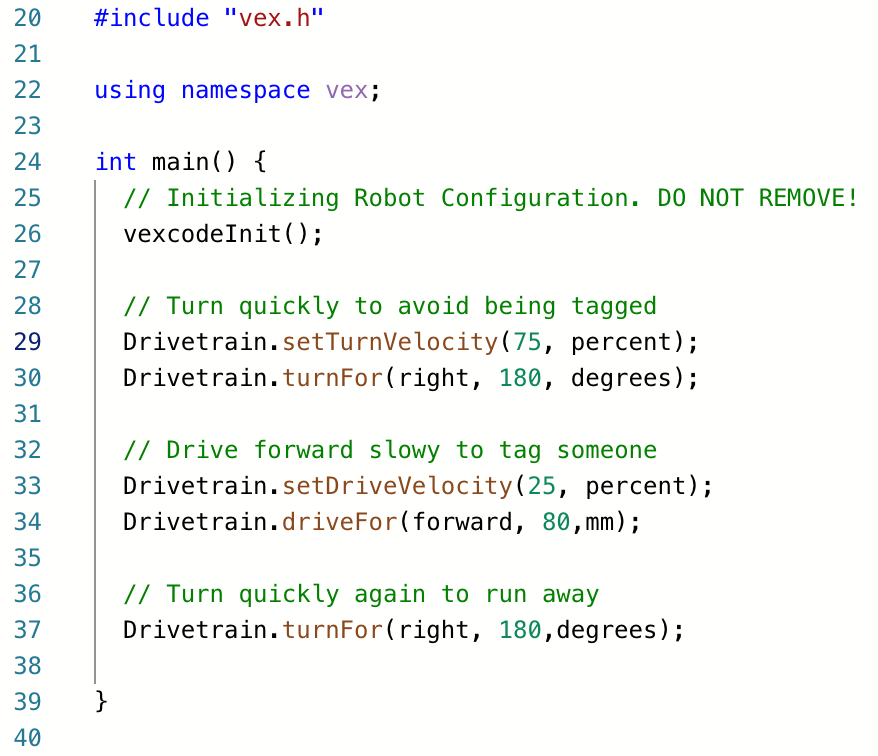
동작에 대한 설명이 간단한 언어로 작성되었고, 주석은 더 큰 동작(꼬리표 놀이)의 개별 구성 요소(즉, 빠르게 회전, 천천히 전진, 천천히 회전)를 포착하고 있다는 점에 유의하세요.
학생들에게 로봇이 어떻게 동작하기를 원하고 기대하는지에 관해 이러한 과제를 어떻게 계획할 것인지 설명해 달라고 요청하는 것이 좋습니다.