
競争する
さあ、キューブ コレクター コンテストに参加しましょう! Cube Collector は、1 分間の自律走行と 90 秒のドライバー制御走行で 1 回プレイされます。 キューブを収集し、フィールド上の対応する得点ゾーンに配置することで、最も多くのポイントを獲得します。 以下のビデオを見て、これまでに学んだすべてのことを Cube Collector コンテストに適用するプロセスを学びましょう。
ルールを理解する
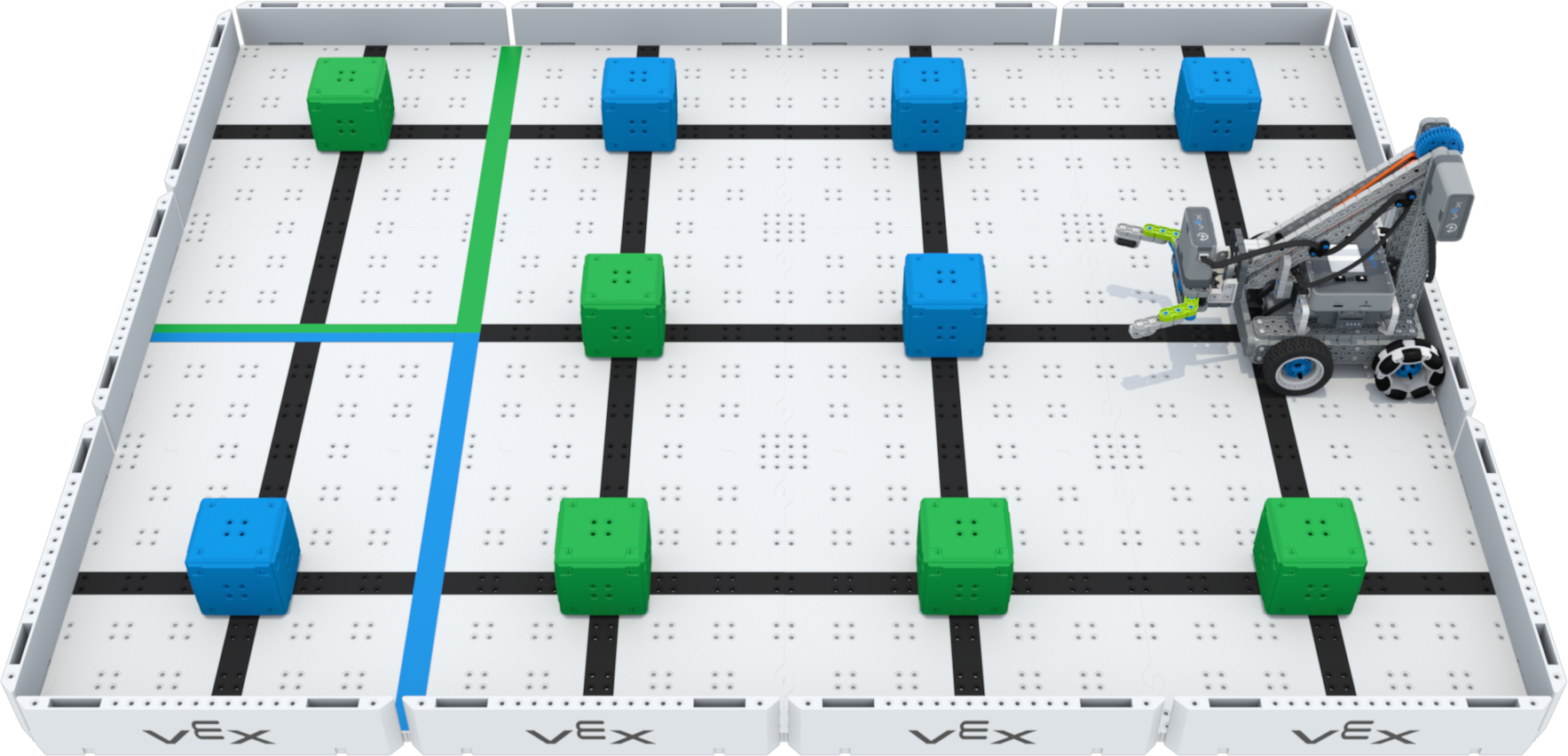
Cube Collector は 2 部構成のチャレンジで、1 つは自律走行で、もう 1 つはドライバーの制御を使用してプレイされます。 ゲームの目的は、キューブを収集し、フィールド上の一致する得点ゾーンに配置して得点することです。 両方の実行のスコアを組み合わせて、合計スコアを決定します。
あなたとあなたのチームは、エンジニアリング設計プロセスをロボット、コード、ドライバー制御戦略に適用して、スコアを最大化できます。
Cube Collector コンテストで成功するために使用できる戦略は数多くあります。 このアニメーションを見て、実際の Cube Collector ゲームプレイの一例をご覧ください。
競技のルールを分析および解釈するには、この文書をお読みください。 Google ドキュメント / .docx / .pdf
ルールを読みながら、自律走行およびドライバー制御走行のためのゲーム戦略を開発するためにルールをどのように使用できるかを考えてください。 戦略の策定に役立つように、レッスン 4 の実践と課題アクティビティからのデータを使用することを忘れないでください。
理解を確認してください
次のビデオに進む前に、エンジニアリング ノートブックにある以下の文書の質問に答えて、コンテストのルールを必ず理解してください。
理解度を確認するための質問 Google ドキュメント / .docx / .pdf
エンジニアリング設計プロセスの適用
エンジニアリング設計プロセスに関するこのビデオを見て、Cube Collector コンテストに向けてゲーム戦略、コード、またはロボット設計の開発と反復を続ける手順を確認してください。
協調的な意思決定
エンジニアリング設計プロセスを進める際には、チーム メンバーとコミュニケーションをとる必要があります。 このビデオを見て、チームで意思決定を行う際に使用できる適切なコミュニケーションの例をご覧ください。
< レッスンに戻る を選択して、レッスンの概要に戻ります。
次へ > を選択して、このレッスンを通じて学んだことと行ったことを振り返ります。