
요약
필요한 재료
다음은 VEX 123 Lab을 완료하는 데 필요한 모든 자료 및 교육 리소스의 목록입니다. 먼저 123 로봇을 포함하여 실험실 전체에 필요한 재료가 나열됩니다. 특정 랩에서는 슬라이드쇼 형식의 교육 자료 링크가 포함되어 있습니다. 모든 실험실에 슬라이드쇼가 포함되지는 않습니다. 이 슬라이드는 학생들에게 배경 정보와 영감을 제공하는 데 도움이 될 수 있다. 모든 슬라이드는 편집할 수 있으며 학생을 위해 투영하거나 교사 자료로 사용할 수 있습니다.
| 재료 | 목적 | 권장 사항 |
|---|---|---|
|
123 로봇 |
화성 탐사선의 역할을 수행하고 프로젝트를 수행합니다. |
그룹당 1개 |
|
123 필드 |
화성 착륙 지역 및 프로젝트의 테스트 표면으로 사용. |
2개 그룹당 1개의 필드 |
|
태블릿 또는 컴퓨터 |
VEXcode 123에 액세스하려면. |
그룹당 1개 |
|
VEXcode 123 |
123 로봇을 위한 프로젝트를 구축합니다. |
그룹당 1개 |
|
가르치는 동안 시각 보조용. |
1 클래스가 볼 수 있도록 | |
|
흰색 폐지 |
123 필드에서 볼을 올려 장애물로 사용합니다. |
필드당 3 ~ 4개 |
|
건조 지우기 마커 |
123 필드의 시작 및 장애물 위치를 표시합니다. |
수강생이 사용할 수 있는 1 |
환경 설정
- 학생들이 VEXcode 123에 액세스하는 방법에 대해 생각해보십시오. 학생들이 사용할 컴퓨터 또는 태블릿이 VEXcode 123에 액세스할 수 있는지 확인하십시오. VEXcode 123 설정에 대한 자세한 내용은 이 VEX 라이브러리 문서를 참조하십시오.
- 수업 전에 각 그룹에 필요한 자료를 수집한다. 이 랩의 경우, 두 명의 학생으로 구성된 각 그룹은 123 로봇, VEXcode 123에 액세스하기 위한 컴퓨터 또는 태블릿, 장애물을 생성하기 위한 스크랩 페이퍼 시트 (필드당 3-4개), 테스트를 위한 123 필드에 대한 액세스가 필요합니다.
-
아래 이미지와 같이 123개의 필드를 미리 설정하여 123 로봇의 테스트 공간으로 활용할 수 있습니다. 건조 지우기 마커를 사용하여 시작을 표시하십시오. 아래 예와 같이 필드에 장애물을 추가하거나 학생들의 요구를 가장 잘 충족시킬 수 있다. 흰색 고철 종이를 구겨 기본적인 장애물을 만듭니다.
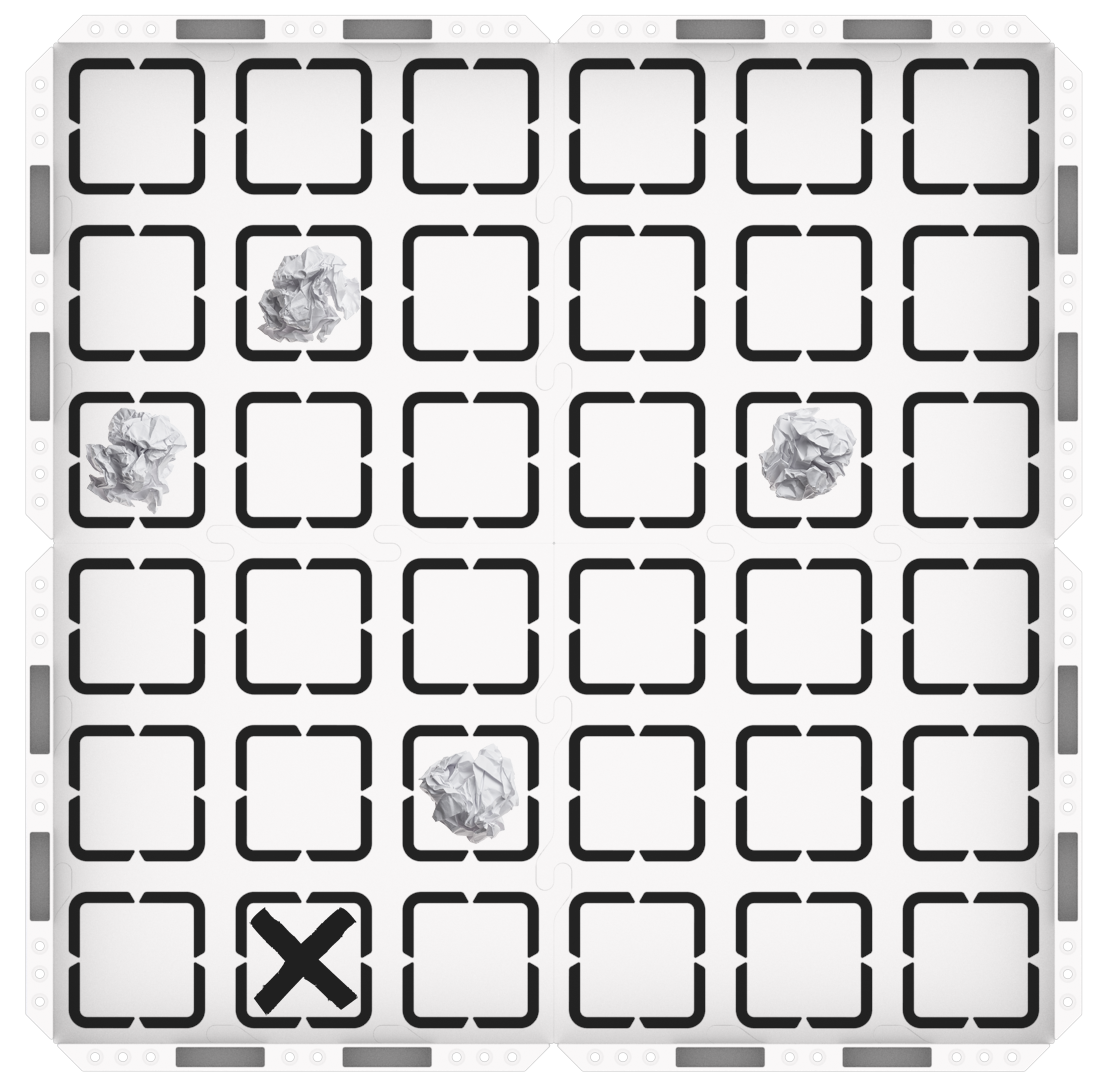
123 필드 설정 - 학생들이 자신의 프로젝트를 테스트할 수 있는 충분한 공간을 확보하기 위해 필드가 교실 주위에 펼쳐지도록 합니다.
-
- 참여 섹션의 퍼실리테이션 전략을 검토하여 학생들이 랩 중에 책임을 공유하는 데 도움이 되는 아이디어를 얻으십시오. 권장된 두 학생보다 큰 그룹의 경우, 학생들에게 더 세분화된 역할을 제공한다. 이 랩에서 학생들의 책임의 예는 다음과 같습니다.
- 123 로봇을 켜고 컴퓨터나 태블릿에 연결합니다.
- 필드에 123 로봇을 시작 위치에 놓고 프로젝트를 시작합니다.
- 테스트 후 필드의 장애물 재설정.
- Play Part 1의 VEXcode 123에서 프로젝트를 빌드합니다.
- Play Part 1의 VEXcode 123에서 프로젝트 편집.
- Play Part 2의 VEXcode 123에서 프로젝트를 빌드합니다.
-
Play Part 2의 VEXcode 123에서 프로젝트 편집.
참여
학생들과 함께 참여하여 실습을 시작하십시오.
-
 후크
후크
실험실 1에서 123 로봇은 화성 탐사선이 안전하게 착륙할 수 있도록 착륙 지점에서 하나의 장애물을 운전하고 감지했습니다. 착륙장에 여러 장애물이 있다면 어떨까요?
-
 시연하기
시연하기
학생들은 123대의 로봇을 깨우고 VEXcode 123에 연결하여 Play 활동을 준비합니다.
-
 리딩 질문
리딩 질문
착륙지에서 여러 장애물을 감지하기 위해 프로젝트에서 루프를 어떻게 사용할 수 있습니까?
재생
학생들에게 도입된 개념을 살펴볼 수 있도록 한다.
1부
학생들은 123 로봇이 착륙 지점 전체를 주행하고 화성 탐사선이 착륙하는 동안 마주칠 수 있는 모든 장애물을 감지하는 프로젝트를 만들어야 합니다. 그들은 실험실 1의 프로젝트를 시작점으로 사용하여 문제를 해결하는 데 도움을 줄 것입니다. 이 랩은 학생들이 이전에 배운 것을 사용하여 문제를 해결하도록 요청하는 개방형 탐구입니다.
미드플레이 브레이크
이는 학생들의 진행 상황을 확인하고 문제를 해결할 수 있는 기회가 될 것이다. 학생들은 자신의 프로젝트를 보여주고 123 로봇이 무엇을 하고 있는지 설명합니다. 착륙 구역 (VEX 123 필드) 의 모든 장애물을 운전하고 감지합니까? 장애물의 위치가 변경되면 프로젝트가 작동할 것이라고 생각합니까? 그 이유는 무엇인가요?
2부
착륙 지점에서 장애물의 위치가 변경되었습니다! 학생들은 프로젝트를 편집하여 123 로봇이 장소가 변경되었을 때 착륙장의 모든 장애물로 운전하도록 해야 합니다.
대체 코딩 방법
이 랩은 VEXcode 123과 함께 사용하도록 작성되었지만 Coder를 사용하여 완료할 수도 있습니다. 각 그룹에 태블릿이나 컴퓨터를 제공하는 대신 학생들에게 Coder 및 Coder 카드를 배포하여 반복적으로 개체를 구동하고 감지하는 프로젝트를 구축하십시오. 코더에 대한 자세한 내용은 VEX 코더 VEX 라이브러리 사용 문서를 참조하십시오.
공유
학생들이 자신의 학습 내용을 토론하고 게시할 수 있도록 한다.
활성 공유
학생들이 자신의 프로젝트를 서로 공유하게 한다. 그룹별로 프로젝트가 어떻게 다른지 비교하고 대조할 수 있습니다.

토론 프롬프트
- 프로젝트에서 루프가 무엇을 하는지 어떻게 설명하시겠습니까?
- VEXcode 123 프로젝트를 만들고 테스트하는 동안 그룹이 직면한 한 가지 어려움은 무엇이었습니까? 어떻게 대처하셨나요?