
Destruidores de Castelos
6 Lições
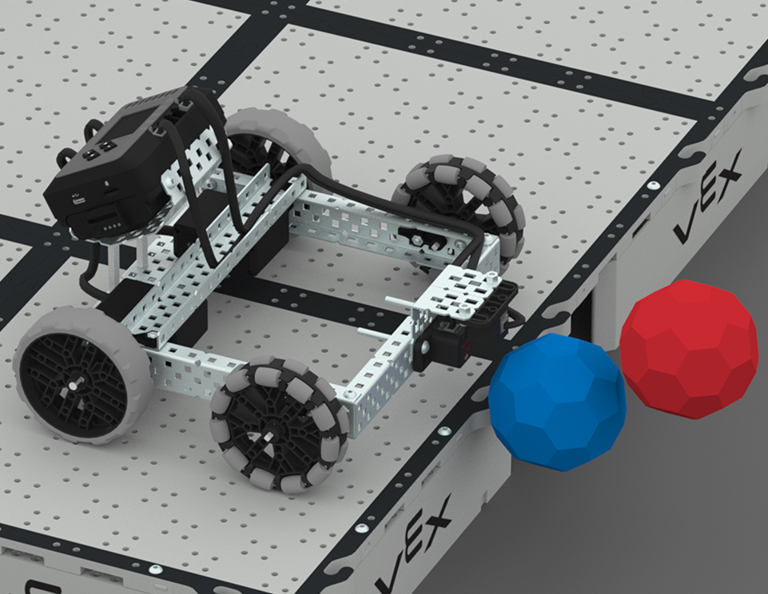
Nesta unidade, irá explorar como utilizar os sensores óticos e de distância para procurar, colidir e limpar ‘castelos’ de Buckyball para marcar pontos na competição Castle Crasher!
Visite o Portal do Professor para materiais de apoio ao professor e vídeos sobre o conteúdo e facilitação das Lições do Castle Crasher.
Lição 1: Introdução
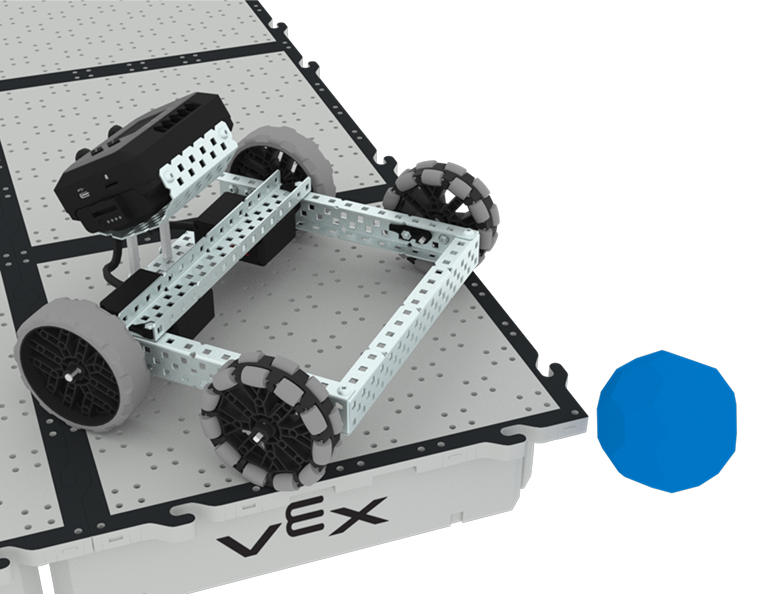
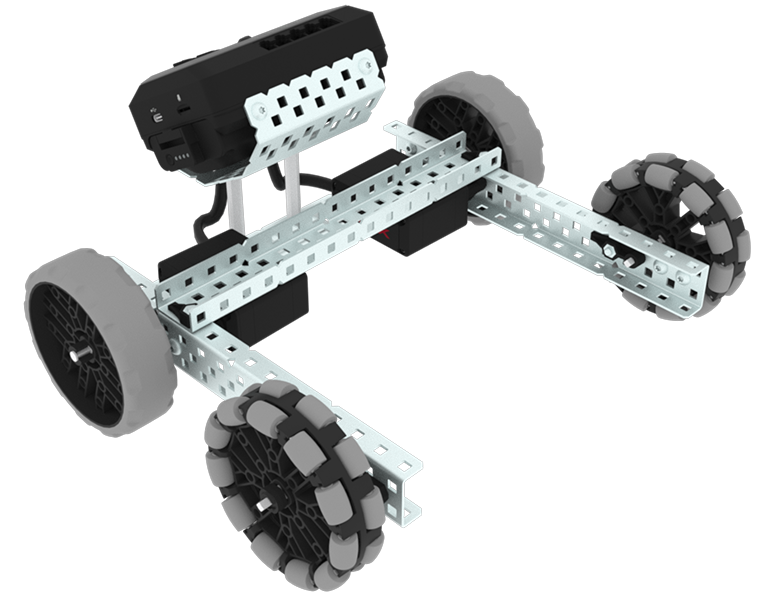
Nesta Lição, você será apresentado à Competição Castle Crasher, construirá o BaseBot e se preparará para programar.
Lição 2: Castle Crasher Sem Sensores
Nesta lição, você aprenderá a calcular ângulos e alterar a velocidade do seu robô para poder competir no Buckyball Blitz Challenge.
Lição 3: Castle Crasher + Sensor de Distância
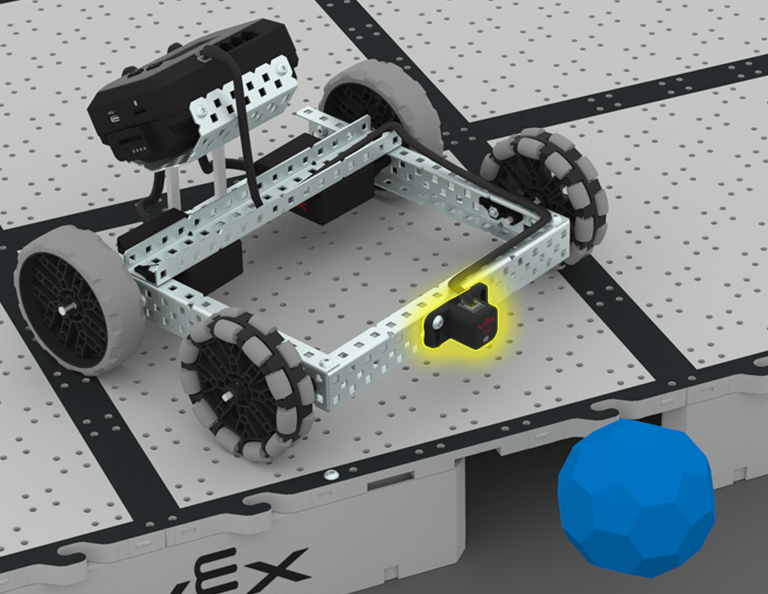
Nesta lição, você aprenderá sobre o que é o sensor de distância e como ele pode ser usado no seu robô. Você também aprenderá sobre o bloco [Wait until] e como ele pode ser usado em um projeto VEXCODE EXP. Então você aplicará o que aprendeu para competir no Sense and Sweep Challenge!
Lição 4: Criando Algoritmos
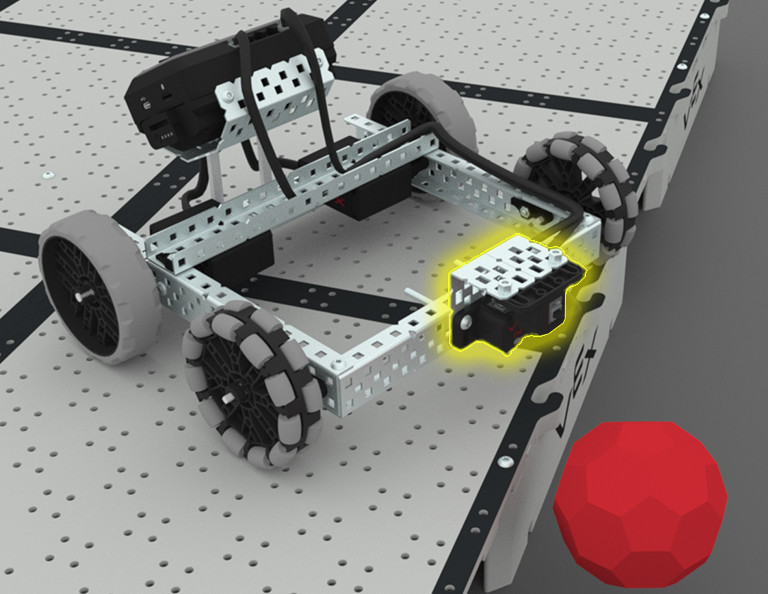
Nesta lição, você aprenderá sobre o sensor óptico e sobre como criar um algoritmo que usa o feedback do sensor. Em seguida, você codificará seu robô para encontrar Buckyballs de forma autônoma e empurrá-los para fora do Campo no Desafio Varrer o Campo.
Lição 5: Competição Castle Crasher
Nesta Lição, você aplicará o seu aprendizado das Lições anteriores para competir numa competição Castle Crasher!

Lesson 6: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a STEM career.