
Brincadeira
Parte 1 - Passo a Passo
- InstruaInstrua os alunos que irão criar um projeto onde o Braço Robô irá mover um disco
com base na sua cor.
O braço robótico irá esperar até que um disco seja detetado, verificará a cor do disco e tomará uma decisão com base nessa cor. Se o disco corresponder à cor do projeto, braço do robô levantará o disco e movê-lo-á para outra parte do bloco, largará o disco e regressará ao local inicial. Veja o vídeo abaixo para ver como o braço robótico poderia mover o disco com sucesso, primeiro sentindo o disco e depois levantando-o para o mover para outro local com base na sua cor.
Arquivo de vídeo - ModeloModele como adicionar o bloco [If then] e o bloco [Forever] ao projeto com os
alunos. Explique que, neste exemplo, o Braço Robô irá procurar a cor verde
-
Peça aos alunos que abram o seu projeto Laboratório 4 Parte 2 e o renomeiem como Laboratório 5 Parte 1.

Dê um nome ao projeto - Se houver algum aluno que não esteve presente no Laboratório 4 ou não conseguir encontrar o seu projeto, peça-lhes que recriem a solução do Laboratório 4 Parte 2 da apresentação de diapositivos de imagens do Laboratório 5.

Laboratório 4 Parte 2 Solução - Antes de começar, certifique-se de que os alunos ligaram o dispositivo ao braço do robô Code (2 eixos) e que a configuração do projeto está definida para o braço do robô. Se necessário, revise as etapas para Configurar um braço robótico e Conectar um cérebro VEX GO, em seguida, modele essas etapas para que os alunos conectem e configurem seu braço robótico.
Nota: Quando liga pela primeira vez o braço robótico ao dispositivo, o giroscópio incorporado no cérebro pode ser calibrado, fazendo com que o braço robótico se mova sozinho por um momento. Este é um comportamento esperado, não toque no braço do robô durante a calibração.
- Arraste o bloco [If then] para o espaço de trabalho.
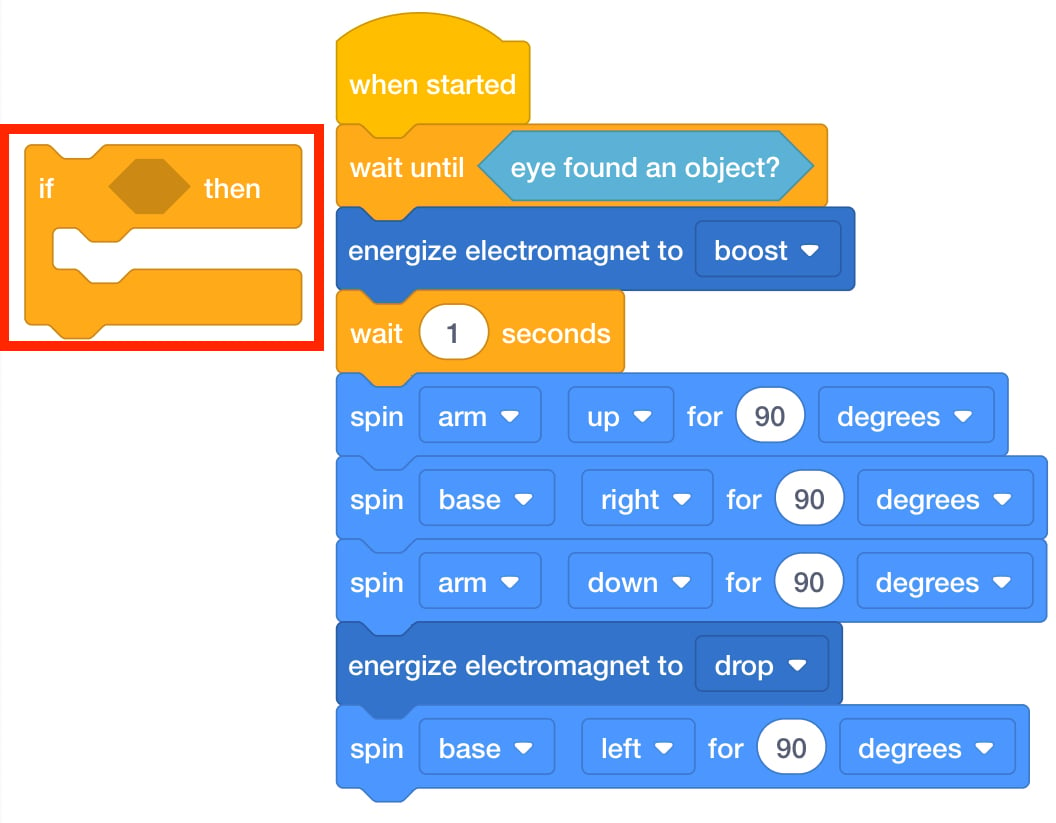
Adicionar um bloco [If then] ao espaço de trabalho - Um bloco [If then] pode ser adicionado em torno dos blocos existentes. Mostre aos alunos a sombra que aparece enquanto o bloco está a ser adicionado. Esta sombra indica onde o bloco será adicionado à pilha.
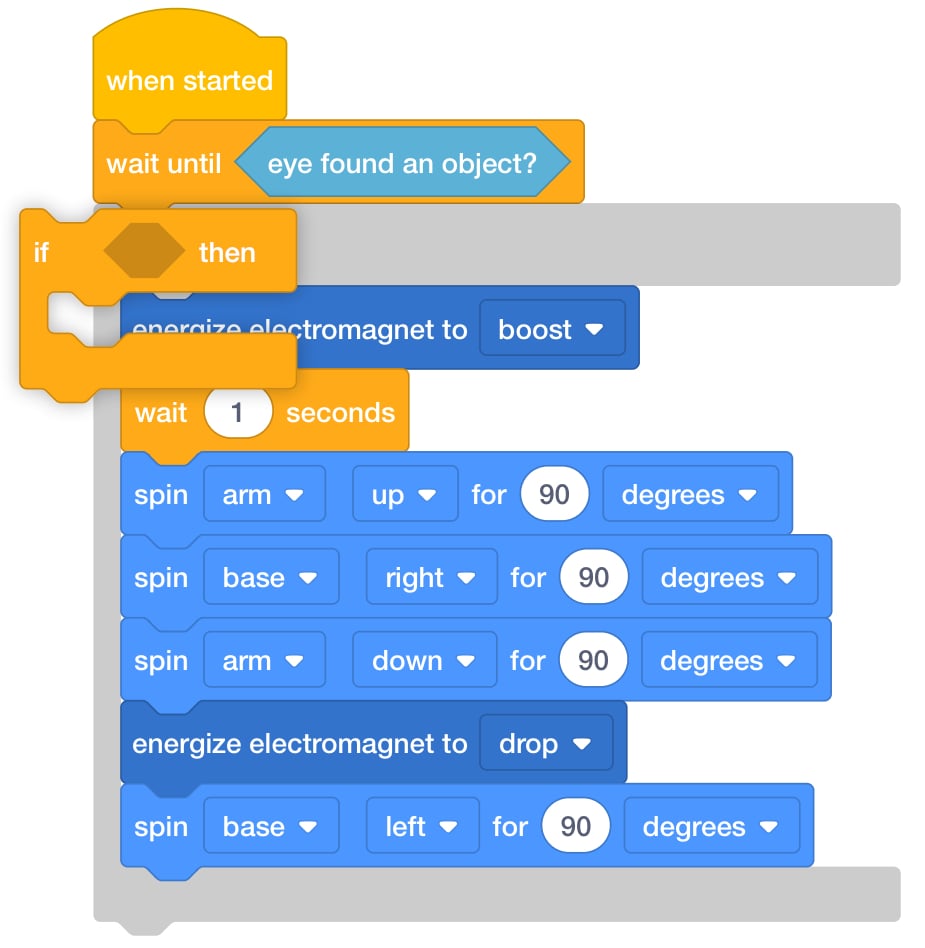
Adicionar [If then] a um projeto - Pergunte aos alunos qual a condição que pretendem verificar (o sensor ocular deteta um objeto de uma cor específica). Arraste o bloco <Color sensing> para o bloco [If then].
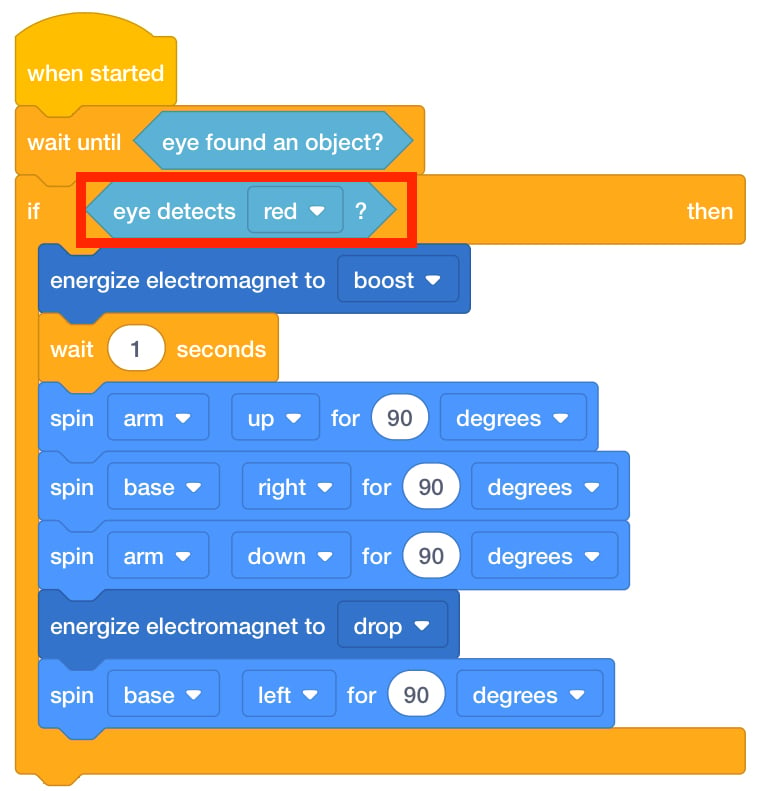
<Color sensing> Bloco Adicionado - Explique que o bloco <Color sensing> pode ser utilizado para detetar as cores dos discos: vermelho, azul e verde. Selecione a opção suspensa 'verde'.
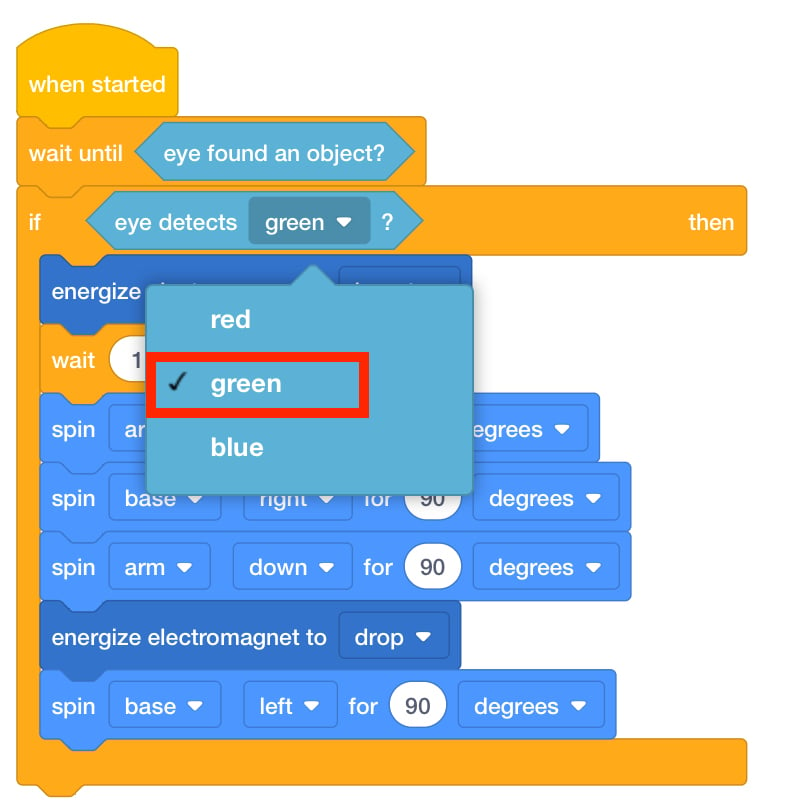
Selecione 'verde' - Explique que os blocos [Se então] são instruções condicionais que instruem o robô a verificar uma condição e, se a condição for verdadeira, esse bloco será executado.
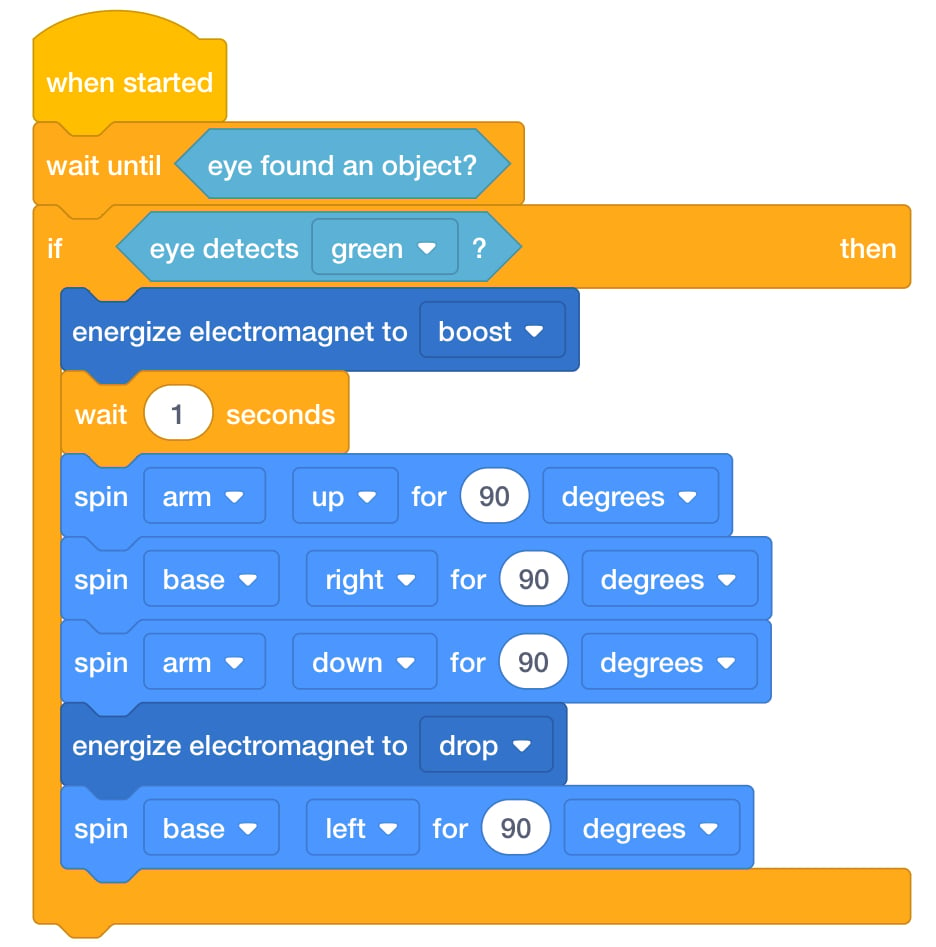
Projeto com o [Se então] Bloco - Pergunte aos alunos quantas vezes o Braço Robô irá verificar a condição <Color sensing> neste fluxo de projeto. É quantas vezes querem que seja verificado? Para verificar repetidamente, terão de adicionar um bloco [Forever]. Arraste um bloco [Para Sempre] para o ambiente de trabalho e coloque-o à volta da pilha de blocos existente.
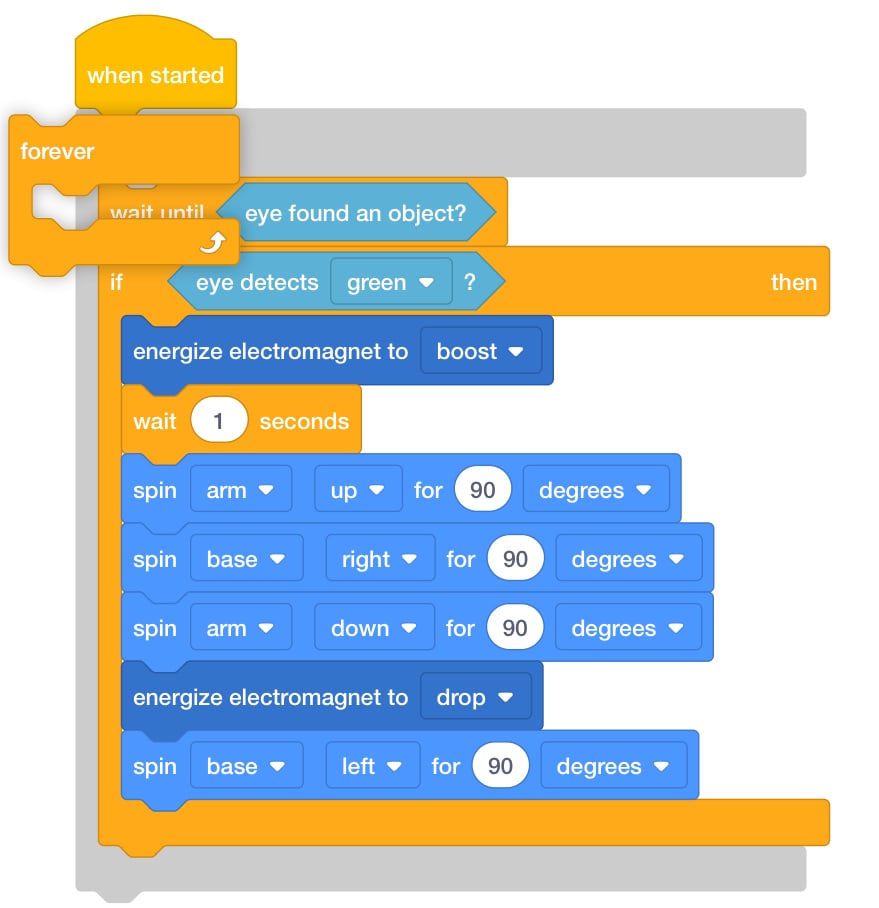
Adicionar [Para sempre] Bloco - Instrua os alunos a selecionar qualquer uma das três cores disponíveis no bloco <Color
sensing> do projeto. Devem fixar o disco da mesma cor ao eletroíman no braço do robô e iniciar o
seu projeto para ver como o braço do robô move o disco.
- Nota: A solução Lab 5 Parte 1 irá variar ligeiramente em função dos grupos de cores escolhidos.

Laboratório 5 Parte 1 Solução -
- FacilitarFacilitar a conversa à medida que os alunos começam a criar os seus projetos.
Incentive-os a testar os seus projetos à medida que os criam.
- O seu projeto funciona conforme planeado? Porquê ou por que não?
- Como descreveria o que o bloco [Forever] faz neste projeto?
- O que achas que aconteceria se colocássemos um disco de cor diferente à frente do braço do robô? O braço robótico moveria o disco? Por que razão acha isso?
- Se quisesse que o braço do robô classificasse duas cores, que outros blocos teria de adicionar?
- RecordarLembre os grupos de colocarem questões se ficarem confusos. Se tiverem algum
problema ao utilizar os novos blocos, peça-lhes que sigam estes passos novamente.
Para os grupos que terminaram o seu projecto, peça-lhes que ajudem os grupos que possam necessitar de mais assistência.
- PeçaPeça aos alunos para descreverem acontecimentos na sala de aula ou em casa como
frases do tipo “Se...Então…”. Por exemplo:
- Se sei a resposta, então levanto a mão.
- Se a campainha tocar, então é hora de almoço.
- Se fizer todos os trabalhos de casa, e terei uma hora de exibição.
Discussão em grupo no intervalo & do jogo
Assim que cada grupo tiver codificado o seu braço robótico para apanhar um disco colorido com sucesso, reúna-se para uma breve conversa .
- O que fez o seu braço robótico?
- Incentive os alunos a falarem o mais especificamente possível sobre os comportamentos do robô. Em vez de “Ele viu um disco vermelho”, diga “O sensor ocular do braço do robô detetou um disco vermelho”.
- Como é que o Robot Arm tomou decisões nos nossos projetos? Que blocos utilizamos para instruir o braço robótico a tomar uma decisão?
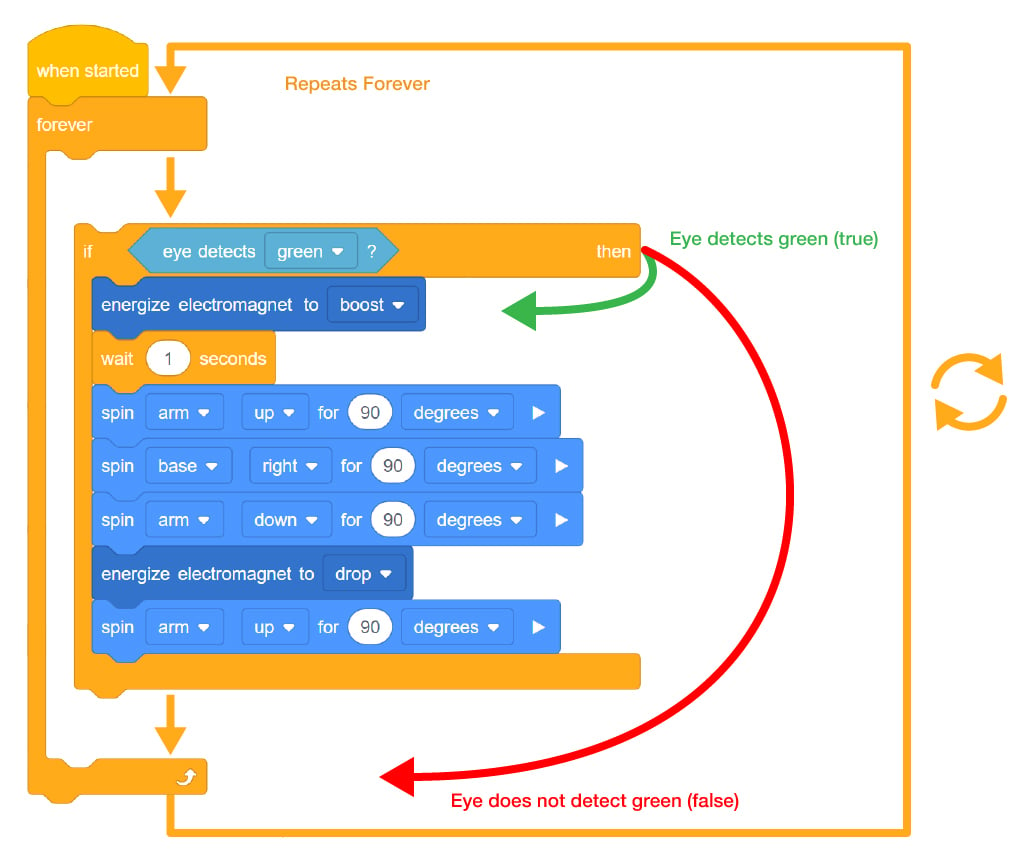
- Quantas vezes o braço robótico verificará uma cor? Porquê? E se retirássemos o bloco [Para Sempre]?
- Utilize a imagem do fluxo do projeto para ajudar a facilitar esta conversa.
Parte 2 - Passo a Passo
- InstruaInstrua os alunos que irão adicionar ao seu projeto para fazer com que o braço
do robô mova os discos coloridos para locais diferentes, dependendo da cor. Veja o vídeo abaixo para ver
como o braço robótico poderia mover os três discos com sucesso, primeiro sentindo o disco e depois
levantando-o para o mover para outro local com base na cor.
Arquivo de vídeo
- ModeloModele para os alunos os passos a adicionar ao projeto para instruir o braço
robótico a mover discos para locais diferentes com base na cor.
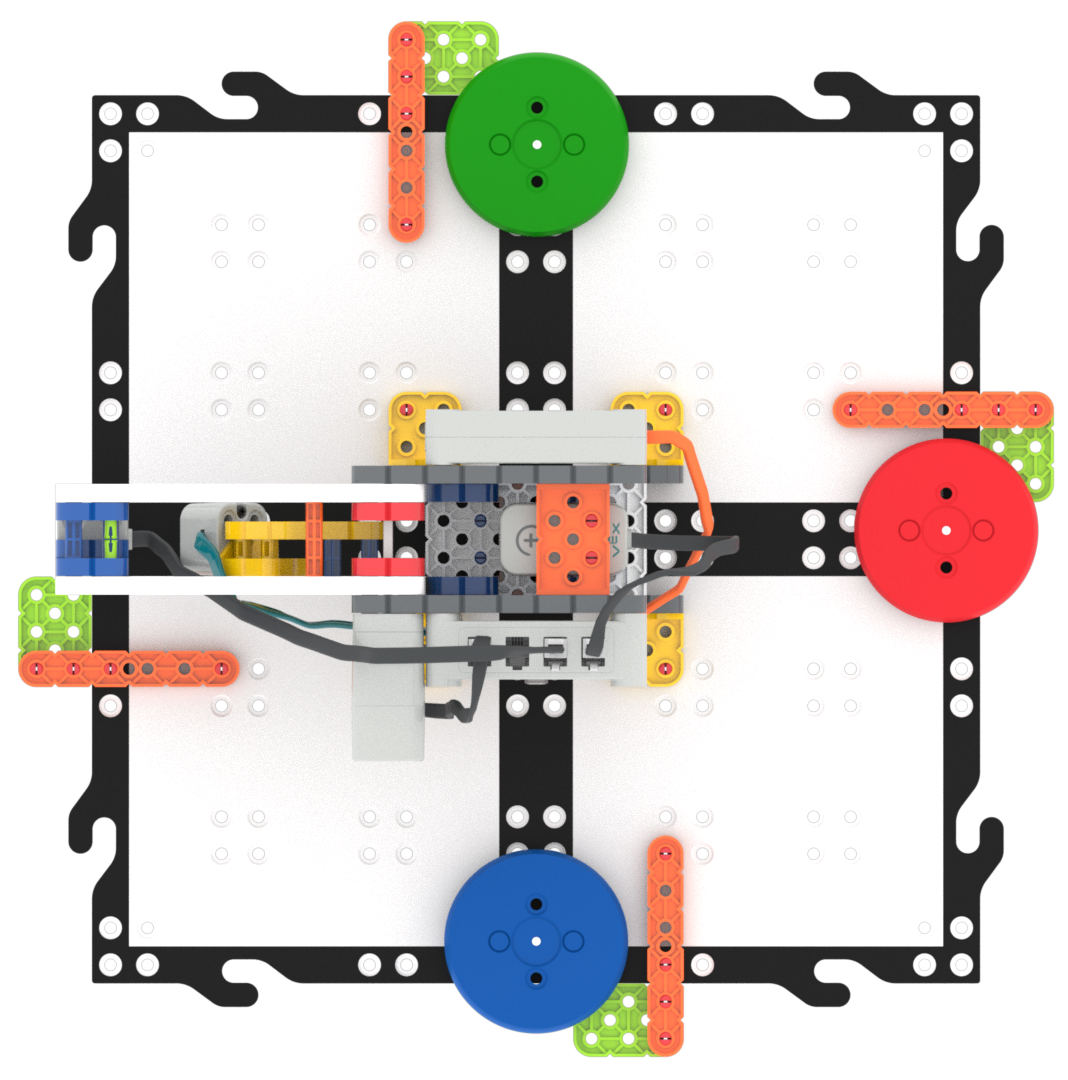
Locais de disco - Peça a cada grupo para iniciar o VEXcode GO no seu dispositivo e abrir o seu projeto Lab 5 Parte 1. O novo projeto basear-se-á neste projeto.
-
Os alunos terão de guardar o seu projeto com um novo nome no início do laboratório. Tenha-os selecione “Salvar como” ou “Salvar no seu dispositivo” (dependendo de qual versão do VEXcode GO você está usando) em o menu Arquivo e salvar seu projeto como Laboratório 5 Parte 2. Se vários grupos estiverem a trabalhar no mesmo dispositivo, peça-lhes que adicionem o nome do grupo ao projeto.

Dê um nome ao projeto - Antes de começar, certifique-se de que os alunos ligaram os seus dispositivos ao braço robótico Code (2 eixos) e que o braço robótico está configurado. Se necessário, revise as etapas paraConfigurar um braço robótico e Conectar um cérebro VEX GO, then model these steps for students to connect and configure their Robot Arm.
- Neste momento, o Robot Arm tem instruções sobre o que fazer quando um Disco Verde é detectado. Ao duplicar os blocos, as instruções para outras cores podem ser criadas rapidamente.
- Modele como duplicar blocos clicando com o botão direito do rato ou premindo o bloco [If then].

Menu de Contexto - Duplique o bloco [If then] duas vezes e adicione-os abaixo do primeiro bloco [If then].
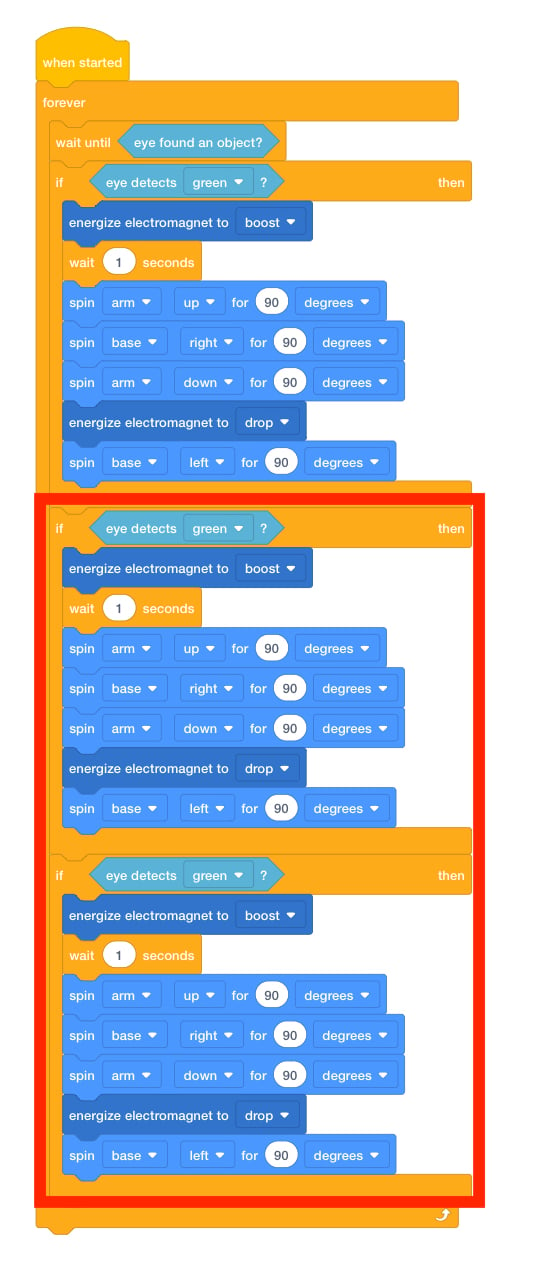
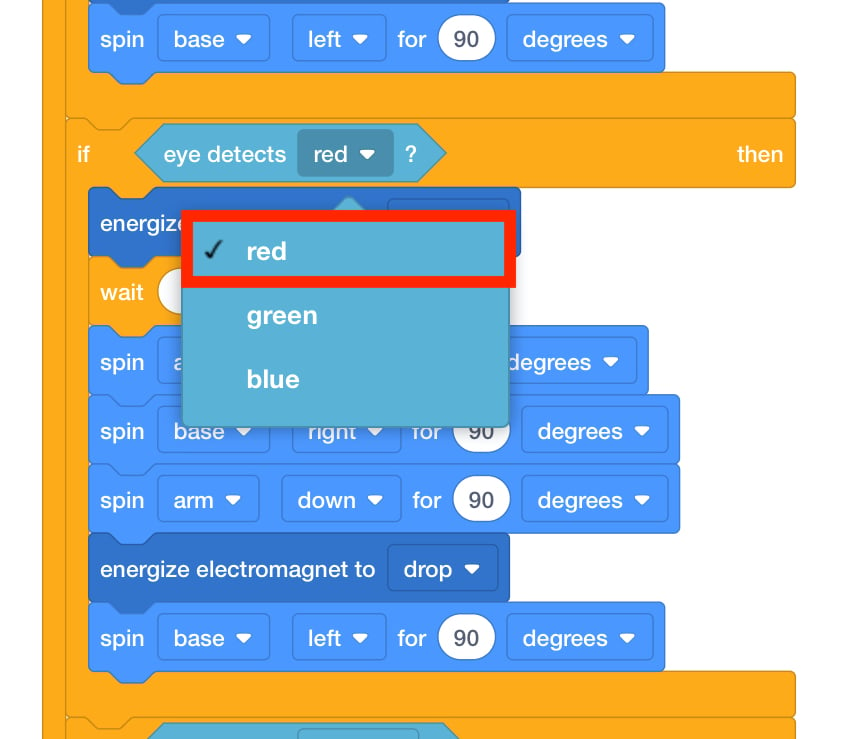
Blocos duplicados - Explique aos alunos que precisam de alterar o bloco <Color sensing> dentro dos blocos [If then] recentemente adicionados para as cores adicionais do disco. Mude o segundo bloco <Color sensing> para 'vermelho'.
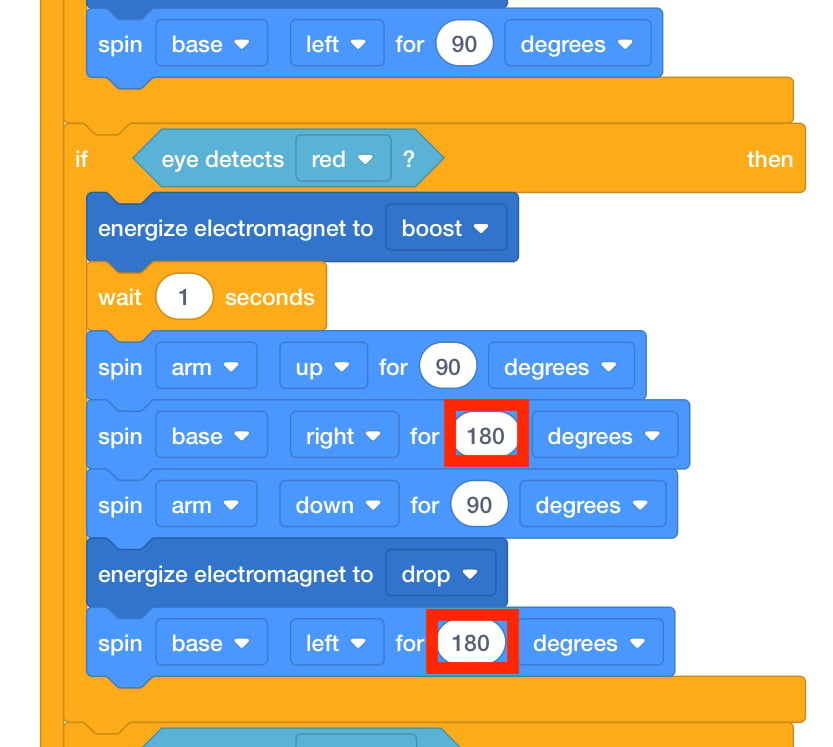
Mude para 'vermelho' - Os blocos dentro deste bloco [If then] necessitam de ser alterados para informar o Braço do Robot onde colocar um Disco Vermelho. Altere os parâmetros dos blocos [Spin for] que controlam o Motor Base para rodar 180 graus em cada direção.
Alterar local de entrega - Agora que o braço robótico já sabe para onde mover os discos vermelhos ou verdes, instrua os alunos para editarem a pilha final. Nesta pilha, o Braço Robô moverá quaisquer Discos Azuis para o local designado.
- Peça aos alunos que coloquem um disco no eletroíman e iniciem o projeto e vejam como o braço do robô se move. Lembre-lhes que devem iniciar o projeto com um disco acoplado ao eletroíman. Revise as etapas em Iniciando um projeto no VEXcode GO se necessário.
- Peça aos alunos testem os seus projetos várias vezes com todos os discos coloridos para garantir que estão a funcionar como esperado.
- FacilitarFacilitar conversas sobre declarações condicionais no fluxo do projeto, à
medida que os alunos alteram parâmetros e testam os seus projetos. Utilize a solução fornecida na
apresentação de diapositivos do Lab 5 para verificar os seus projetos à medida que circula.
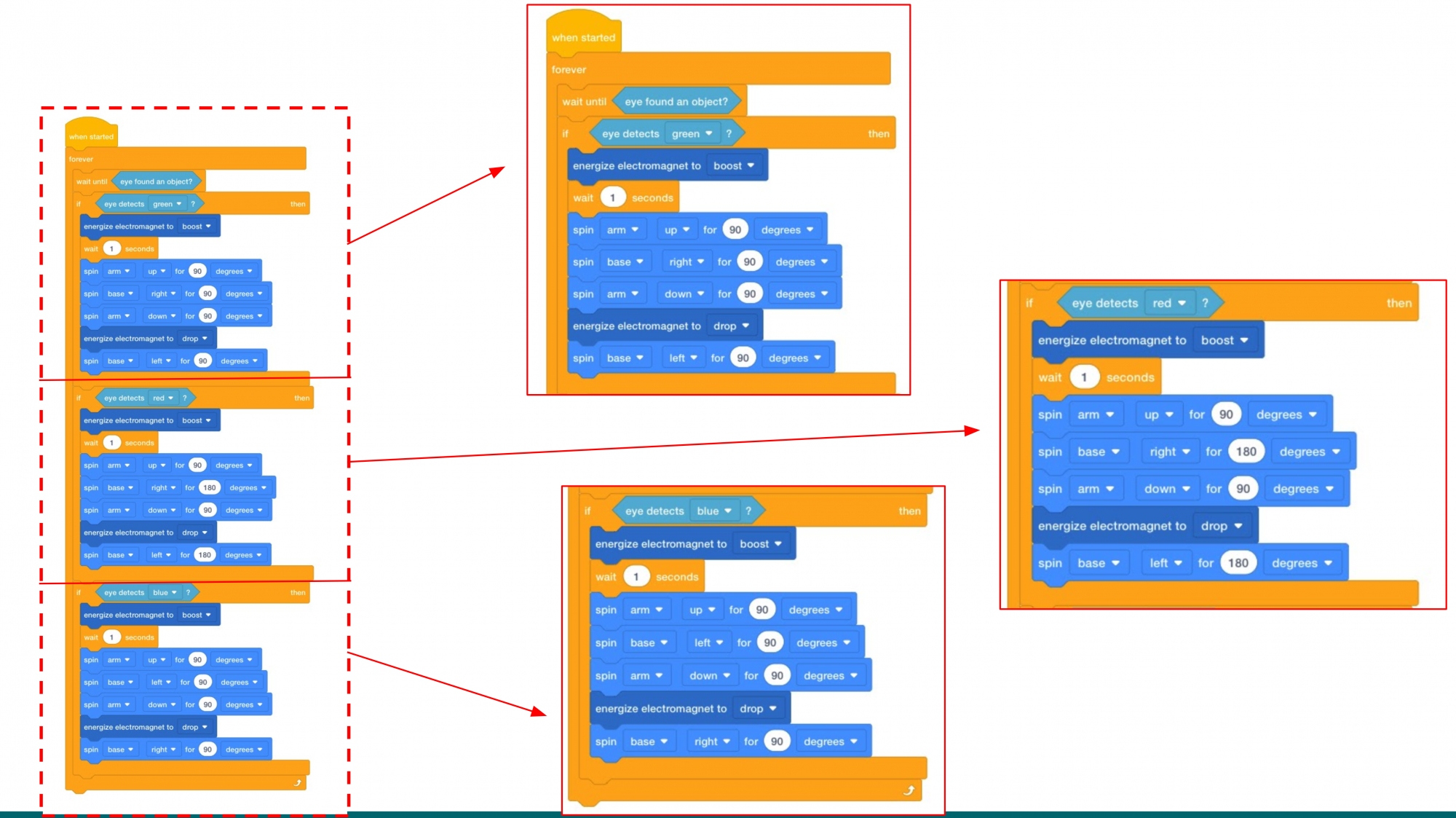
Laboratório 5 Parte 2 Solução Ao circular pela sala verificando os grupos, coloque-lhes algumas das seguintes questões para iniciar uma discussão.
- Como mudaria o código se quiséssemos que as três cores terminassem no mesmo local?
- Descreva-me como se moverá o braço do robô se o sensor ocular detetar a cor vermelha.
- O que aconteceria se um dos meus blocos [Se então] estivesse fora do bloco [Para Sempre]? O braço robótico funcionaria como planeado? Porquê ou por que não?
- E se colocar um feixe laranja à frente do sensor ocular? O braço robótico movê-lo-ia? Explique por que razão não se altera em termos de caudal do projeto.
- LembreLembre os grupos de colocarem as suas pilhas [f then] duplicadas dentro do bloco
[Forever]. Este é um dos possíveis erros que podem ocorrer enquanto os alunos criam os seus projetos.
Lembre os alunos que não há problema em tentar e falhar! Pode haver várias versões antes de criarem o seu projeto final. Aceite o fracasso, faz parte do processo de aprendizagem.
- PerguntePergunte aos alunos como é que as decisões que o Braço Robô toma são
semelhantes ou diferentes das decisões que tomam todos os dias.
Que empregos podem pensar que utilizam a tomada de decisões?