
Jugar
Parte 1 - Paso a paso
- InstruyaIndique a los estudiantes que van a crear un proyecto en el que el brazo
robótico moverá un disco según su color.
El brazo robótico esperará hasta que se detecte un disco, verificará el color del disco y tomará una decisión basada en ese color. Si el disco coincide con el color del proyecto, el brazo levantará el disco, lo moverá a otra parte del mosaico, lo dejará caer y regresará a la ubicación inicial. Mire el video a continuación para ver cómo el brazo robótico podría mover el disco con éxito, primero detectándolo y luego levantándolo para moverlo a otra ubicación según su color.
Archivo de vídeo - ModeloModele cómo agregar el bloque [Si entonces] y el bloque [Para siempre] al
proyecto con los estudiantes. Explique que para este ejemplo, el brazo robótico buscará el color verde.
-
Pida a los estudiantes que abran su proyecto Lab 4 Parte 2 y le cambien el nombre a Lab 5 Parte 1.

Nombra el proyecto - Si hay estudiantes que no estuvieron presentes en el Laboratorio 4 o no pueden encontrar su proyecto, pídales que recreen la solución de la Parte 2 del Laboratorio 4 a partir de la Presentación de imágenes del Laboratorio 5.

Laboratorio 4 Parte 2 Solución - Antes de comenzar, asegúrese de que los estudiantes hayan conectado su dispositivo a su brazo robótico de código (2 ejes) y que la configuración de su proyecto esté establecida en el brazo robótico. Si es necesario, revise los pasos para Configurar un brazo robótico y Conectar un cerebro VEX GO, luego modele estos pasos para que los estudiantes conecten y configuren su brazo robótico.
Nota: Cuando conecta por primera vez su brazo robótico a su dispositivo, el giroscopio integrado en el cerebro puede calibrarse, lo que hace que el brazo robótico se mueva por sí solo por un momento. Este es un comportamiento esperado, no toque el brazo robótico mientras se está calibrando.
- Arrastre el bloque [Si entonces] al Espacio de trabajo.
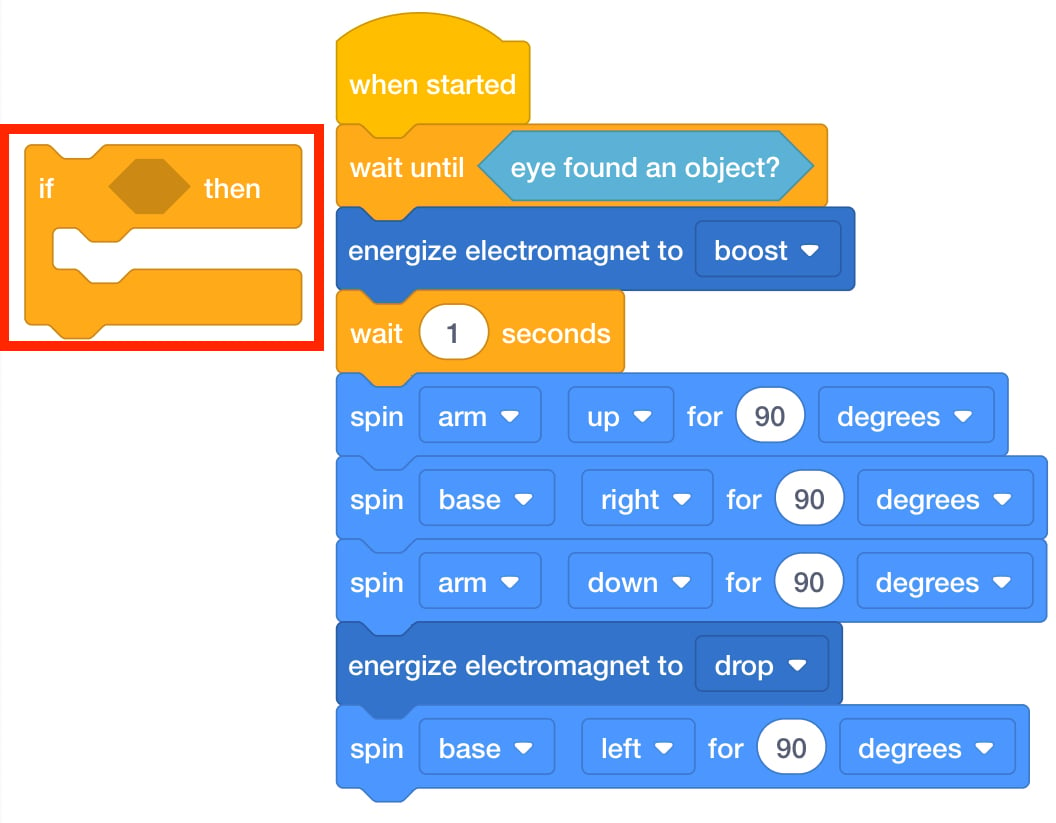
Agregar un bloque [Si entonces] al espacio de trabajo - Se puede agregar un bloque [Si entonces] alrededor de bloques existentes. Muestre a los estudiantes la sombra que aparece mientras se agrega el bloque. Esta sombra indica dónde se agregará el bloque a la pila.
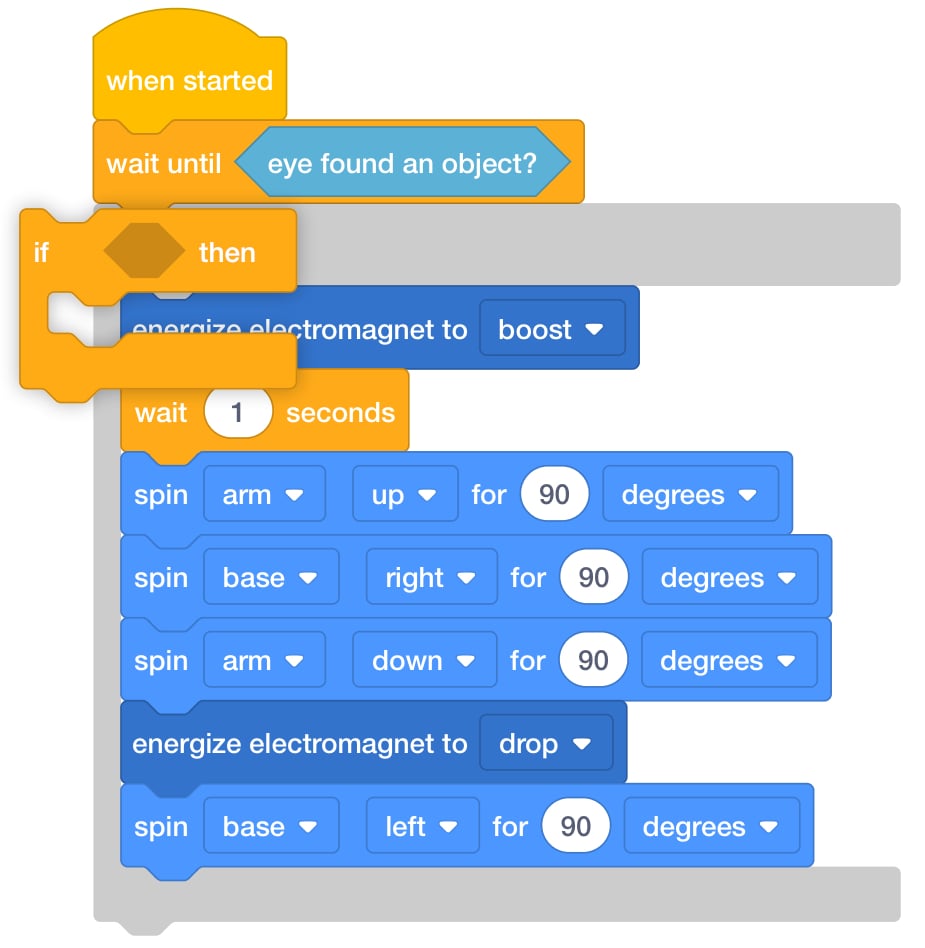
Agregar [Si entonces] a un proyecto - Pregunte a los estudiantes qué condición quieren verificar (el sensor ocular detecta un objeto de un color específico). Arrastre el bloque <Color sensing> al bloque [Si entonces].
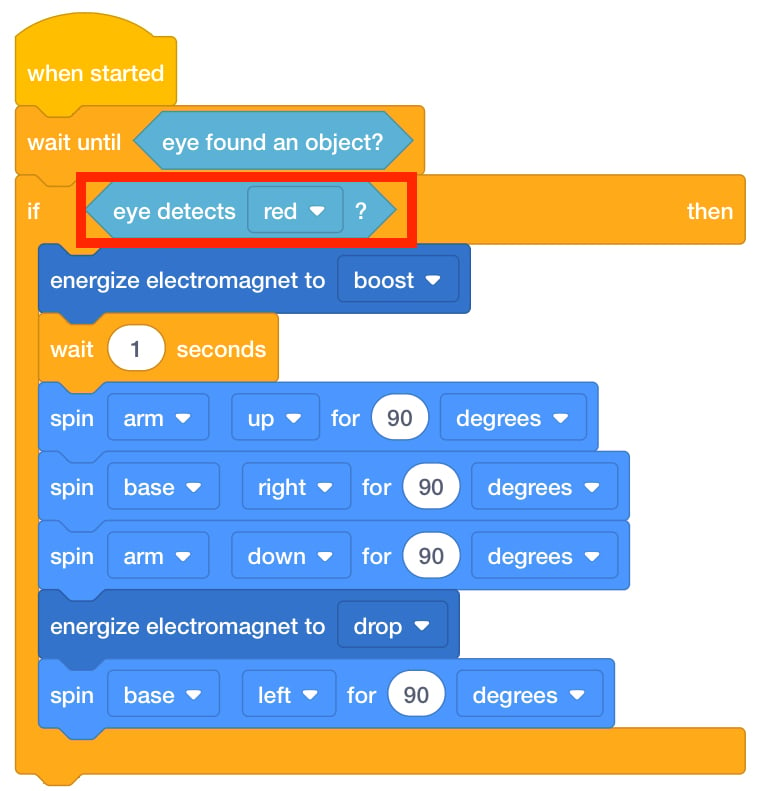
<Color sensing> Bloque añadido - Explique que el bloque <Color sensing> se puede utilizar para detectar los colores de los discos: rojo, azul y verde. Seleccione la opción desplegable "verde".
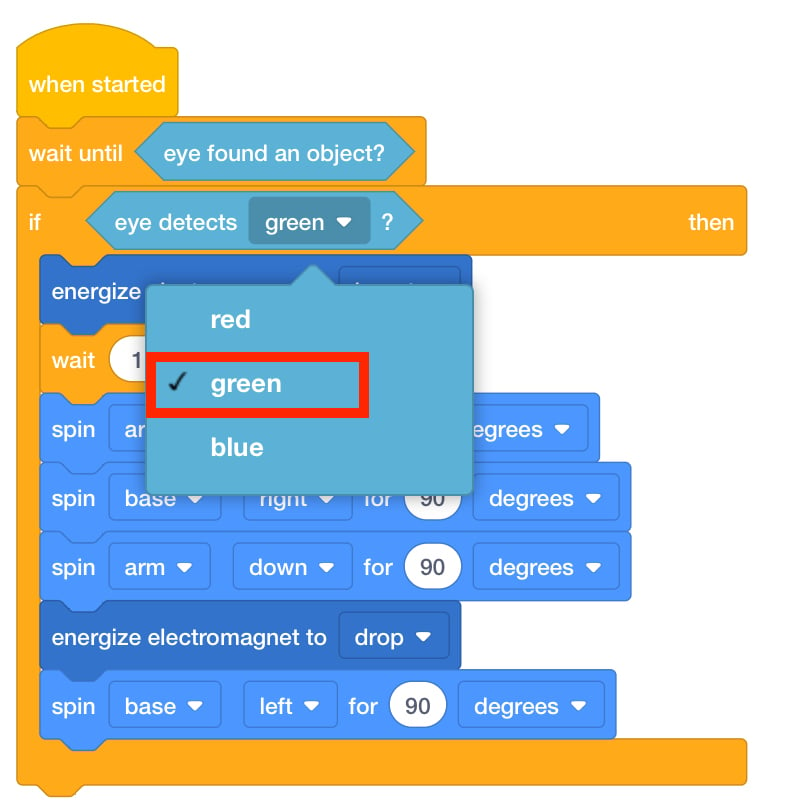
Seleccione 'verde' - Explique que los bloques [Si entonces] son declaraciones condicionales que le indican al robot que verifique una condición y, si la condición es verdadera, entonces este bloque se ejecutará.
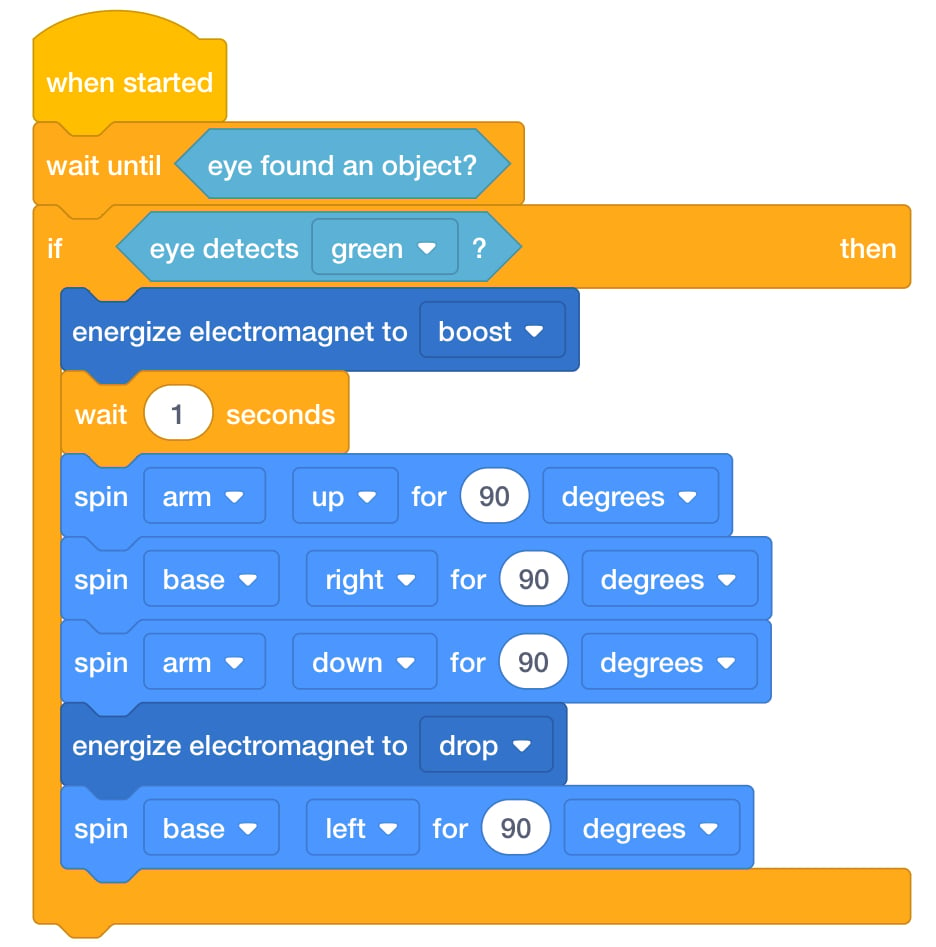
Proyecto con el Bloque [Si entonces] - Pregunte a los estudiantes cuántas veces el brazo robótico comprobará la condición <Color sensing> en este flujo de proyecto. ¿Es esa la cantidad de veces que quieren que lo revisen? Para poder comprobarlo repetidamente, deberán agregar un bloque [Para siempre]. Arrastre un bloque [Para siempre] al espacio de trabajo y colóquelo alrededor de la pila de bloques existente.
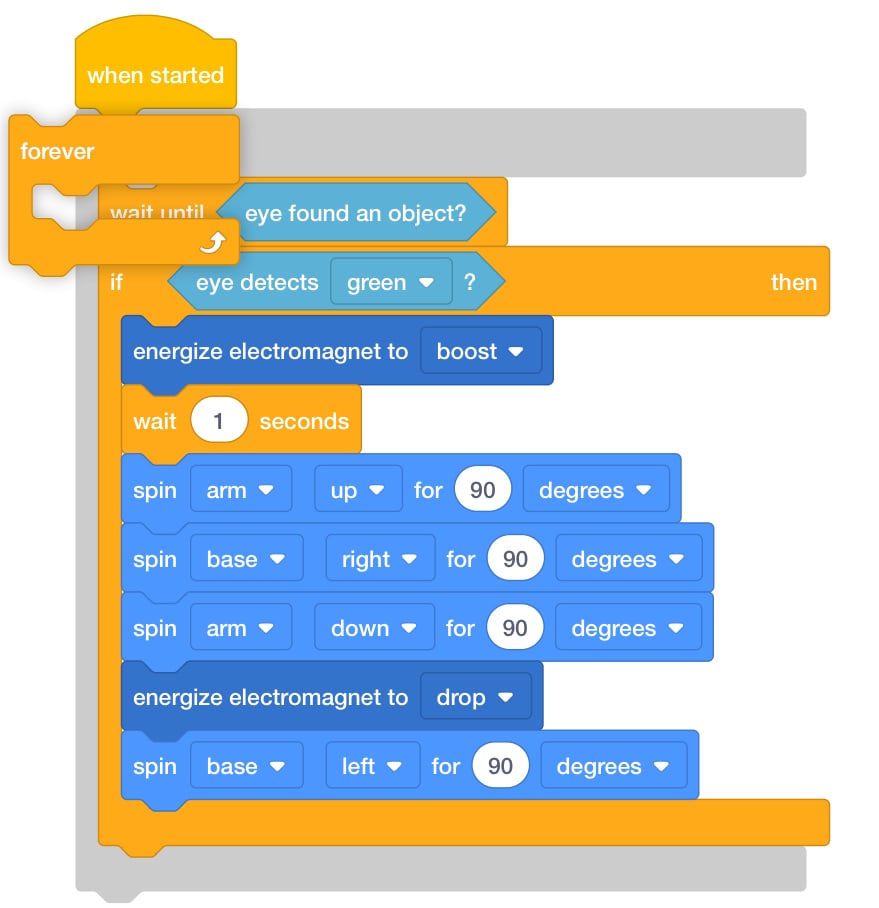
Agregar [Para siempre] Bloque - Indique a los estudiantes que seleccionen cualquiera de los tres colores disponibles en el bloque
<Color sensing> en su proyecto. Deben colocar el disco del mismo color en el electroimán del
brazo robótico y comenzar su proyecto para ver cómo el brazo robótico mueve el disco.
- Nota: La solución del Laboratorio 5 Parte 1 variará levemente dependiendo de los grupos de colores elegidos.

Laboratorio 5 Parte 1 Solución -
- FacilitarFacilitar la conversación mientras los estudiantes comienzan a crear sus
proyectos. Anímelos a probar sus proyectos a medida que los crean.
- ¿Su proyecto funciona según lo previsto? ¿Por qué o por qué no?
- ¿Cómo describirías lo que hace el bloque [Para siempre] en este proyecto?
- ¿Qué crees que pasaría si colocáramos un disco de diferente color delante del brazo robótico? ¿El brazo robótico movería el disco? ¿Por qué piensas eso?
- Si quisieras que el brazo robótico tuviera dos colores, ¿qué otros bloques necesitarías agregar?
- RecordarRecuerde a los grupos que hagan preguntas si están confundidos. Si tienen algún
problema al utilizar los nuevos bloques, pídales que sigan estos pasos nuevamente.
Para los grupos que hayan terminado su proyecto, pídales que ayuden a aquellos grupos que puedan necesitar más ayuda.
- PreguntaPida a los estudiantes que describan los eventos del aula o del hogar como
oraciones del tipo “Si... Entonces…”. Por ejemplo:
- Si sé la respuesta, entonces levanto la mano.
- Si suena la campana, entonces es hora de almorzar.
- Si hago toda mi tarea, entonces tengo una hora de tiempo frente a la pantalla.
Pausa a mitad de juego & Discusión en grupo
Tan pronto como cada grupo haya codificado su brazo robótico para recoger un disco de color con éxito, reúnanse para una breve conversación.
- ¿Qué hizo tu brazo robótico?
- Anime a los estudiantes a hablar lo más específicamente posible sobre los comportamientos del robot. En lugar de “Vio un disco rojo”, diga “El sensor ocular del brazo robótico detectó un disco rojo”.
- ¿Cómo tomó decisiones el Brazo Robot en nuestros proyectos? ¿Qué bloques usamos para indicarle al brazo robótico que tomara una decisión?
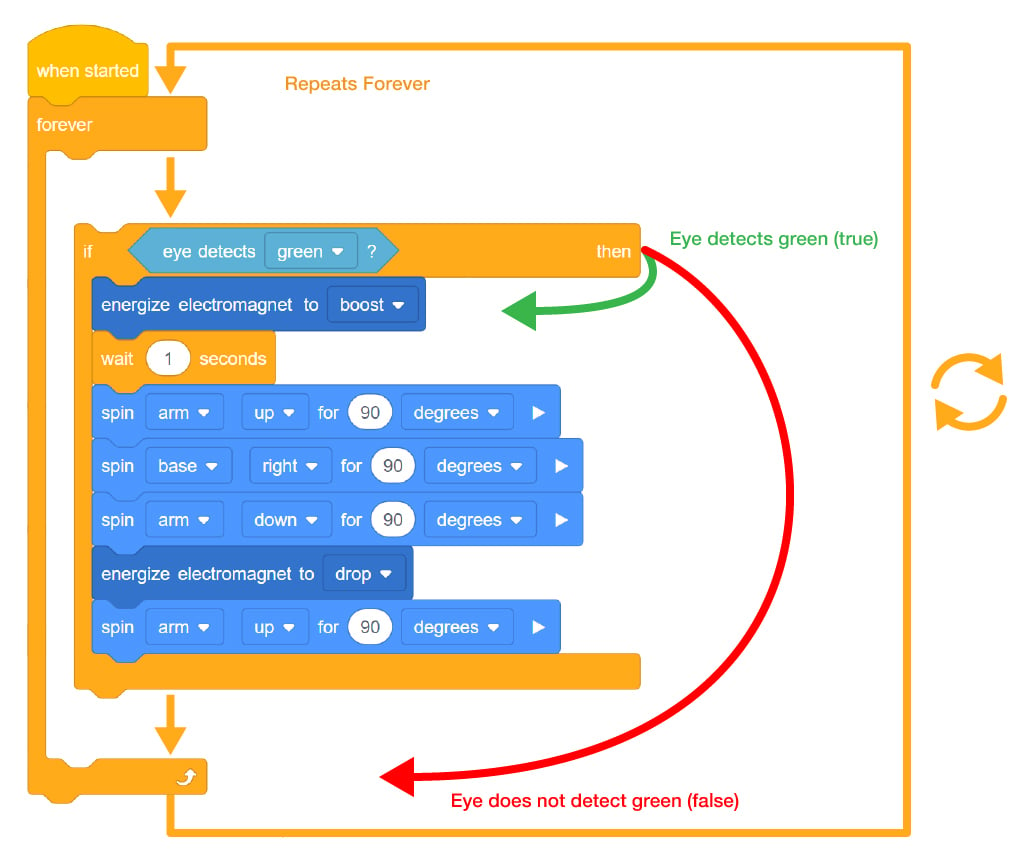
- ¿Cuántas veces comprobará el brazo robótico un color? ¿Por qué? ¿Qué pasaría si elimináramos el bloque [Para siempre]?
- Utilice la imagen del flujo del proyecto para facilitar esta conversación.
Parte 2 - Paso a paso
- InstruyaIndique a los estudiantes que agregarán a su proyecto la herramienta "El brazo
robótico" moverá discos de colores a diferentes ubicaciones según su color. Mire el video a continuación
para ver cómo el brazo robótico pudo mover los tres discos con éxito, primero detectando el disco y luego
levantándolo para moverlo a otra ubicación según el color.
Archivo de vídeo
- Modelo ModeloMuestre a los estudiantes los pasos que deben agregar a su proyecto para
indicarle al brazo robótico que mueva discos a diferentes ubicaciones según el color.
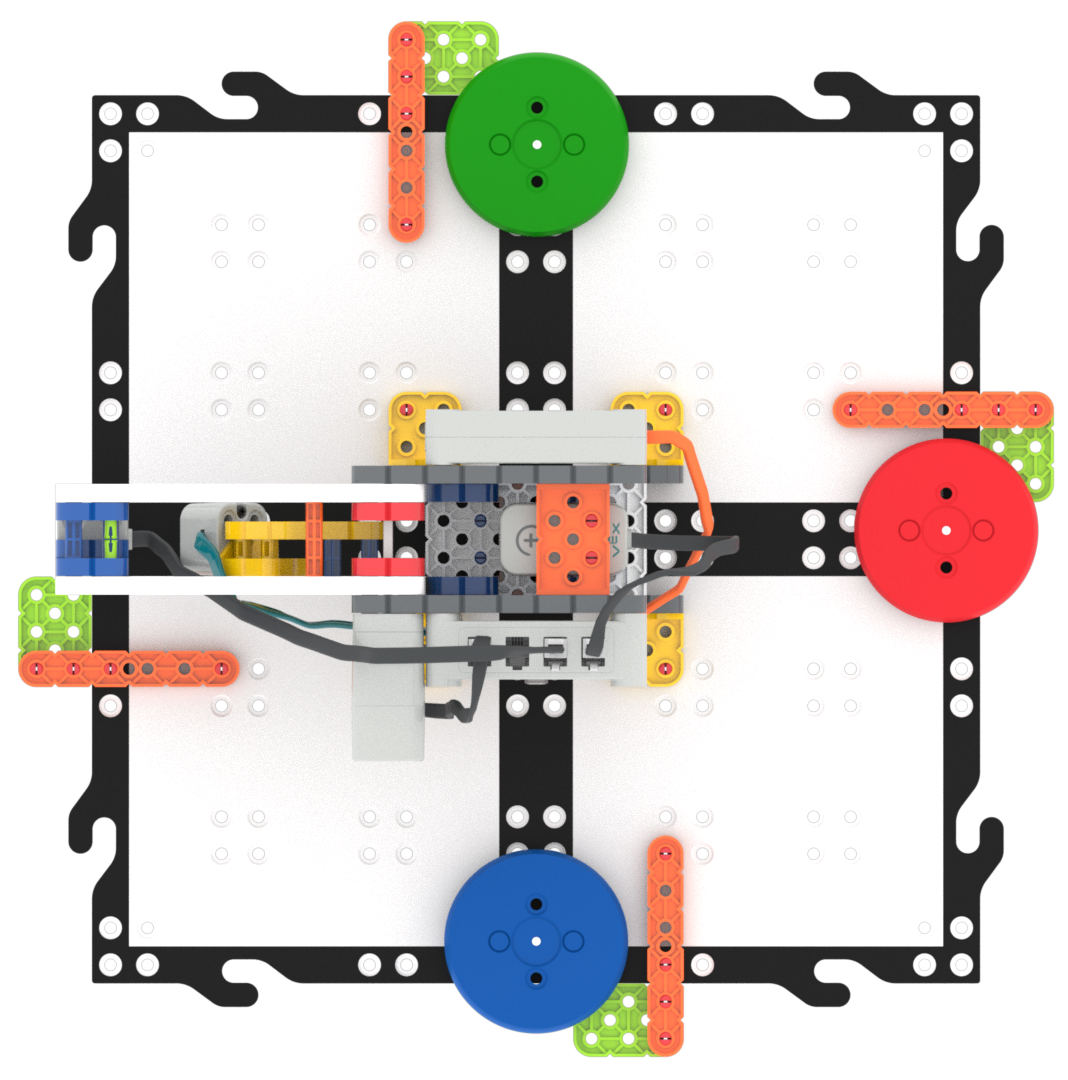
Ubicaciones de disco - Haga que cada grupo inicie VEXcode GO en su dispositivo y abra su proyecto Lab 5 Parte 1. El nuevo proyecto se basará en este proyecto.
-
Los estudiantes deberán guardar su proyecto con un nuevo nombre al comienzo del laboratorio. Have them select “Save As” or "Save to Your Device" (depending on which VEXcode GO version you are using) from the File Menu and save their project as Lab 5 Part 2. Si varios grupos están trabajando en el mismo dispositivo, pídales que agreguen su nombre de grupo al proyecto.

Nombra el proyecto - Antes de comenzar, asegúrese de que los estudiantes hayan conectado su dispositivo a su brazo robótico de código (2 ejes) y que el brazo robótico esté configurado. If needed, review the steps to Configure a Robot Arm and Connect a VEX GO Brain, then model these steps for students to connect and configure their Robot Arm.
- En este momento, el brazo robótico tiene instrucciones sobre qué hacer cuando se detecta un disco verde. Al duplicar los bloques, se pueden crear rápidamente las instrucciones para otros colores.
- Modele cómo duplicar bloques haciendo clic derecho o presionando el bloque [Si entonces].

Menú contextual - Duplique el bloque [Si entonces] dos veces y agréguelos debajo del primer bloque [Si entonces].
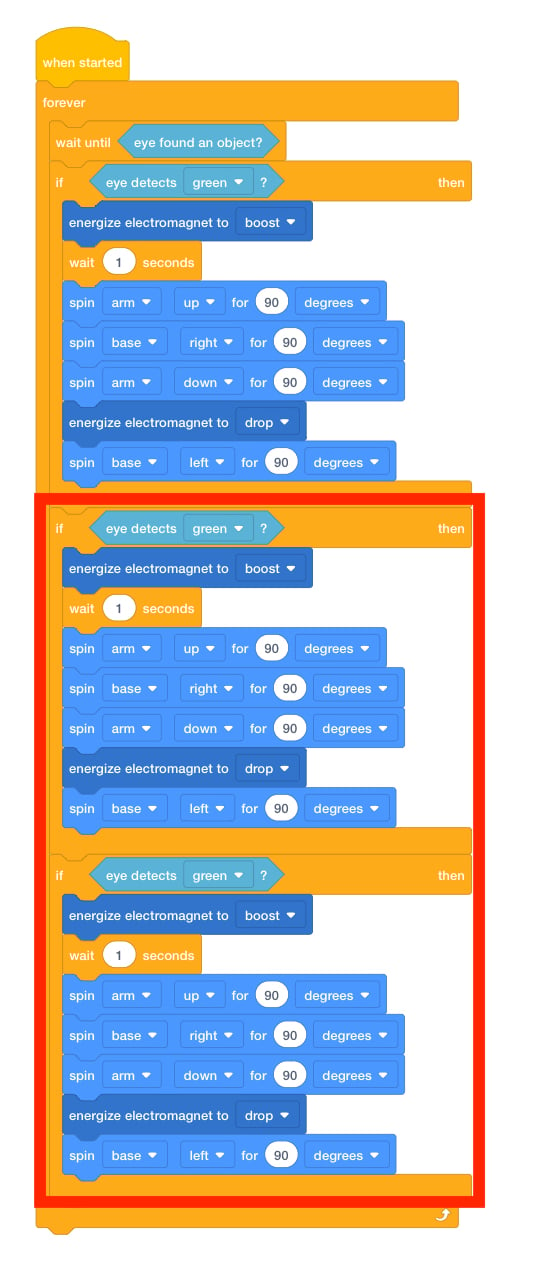
bloques duplicados - Explique a los estudiantes que necesitan cambiar el bloque <Color sensing> dentro de los bloques [Si entonces] recién agregados por los colores de disco adicionales. Cambie el segundo bloque <Color sensing> a 'rojo'.
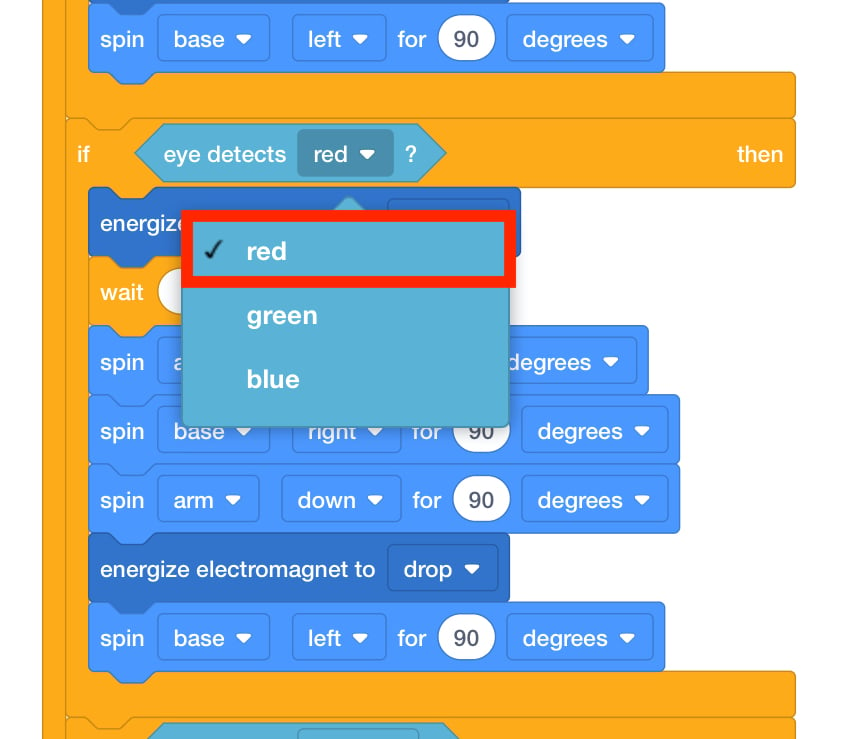
Cambiar a 'rojo' - Los bloques dentro de este bloque [Si entonces] deben cambiarse para indicarle al brazo robótico dónde colocar un disco rojo. Cambia los parámetros de los bloques [Girar para] que controlan el motor base para girar 180 grados en cada dirección.
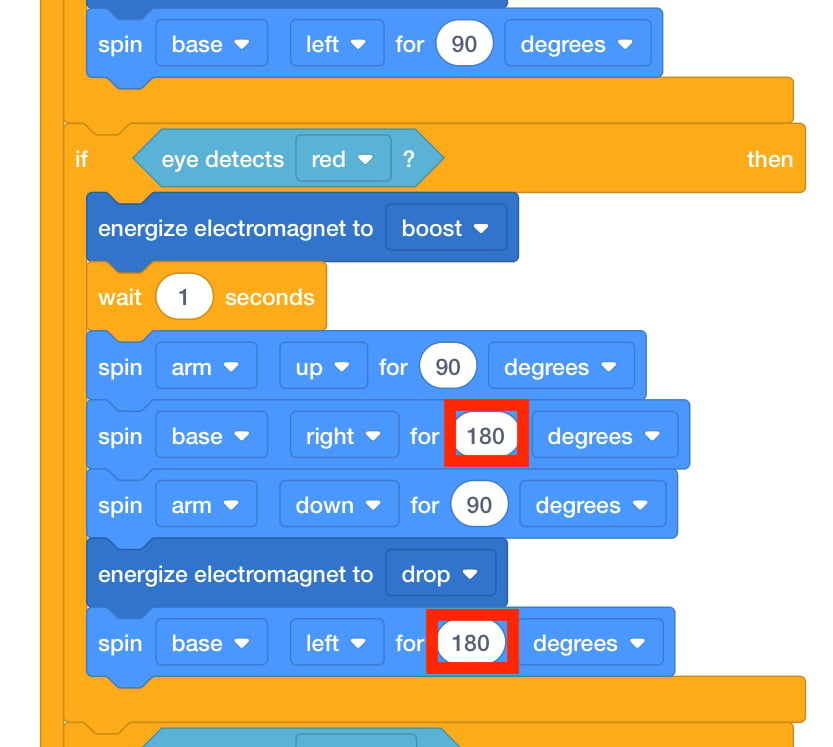
Cambiar lugar de entrega - Ahora que el brazo robótico sabe dónde mover los discos rojos o verdes, indique a los estudiantes que editen la pila final. En esta pila, el brazo robótico moverá cualquier disco azul a su ubicación designada.
- Haga que los estudiantes coloquen un disco en el electroimán y comiencen el proyecto y vean cómo se mueve su brazo robótico. Recuérdeles que deben comenzar el proyecto con un disco conectado al electroimán. Revise los pasos en Iniciar un proyecto en VEXcode GO si es necesario.
- Haga que los estudiantes sus proyectos varias veces con todos los discos de colores para asegurarse de que funcionan según lo previsto.
- FacilitarFacilitar conversaciones sobre declaraciones condicionales en el flujo del
proyecto, mientras los estudiantes cambian parámetros y prueban sus proyectos. Utilice la solución
proporcionada en la presentación de diapositivas del Laboratorio 5 para verificar sus proyectos a medida
que circula.
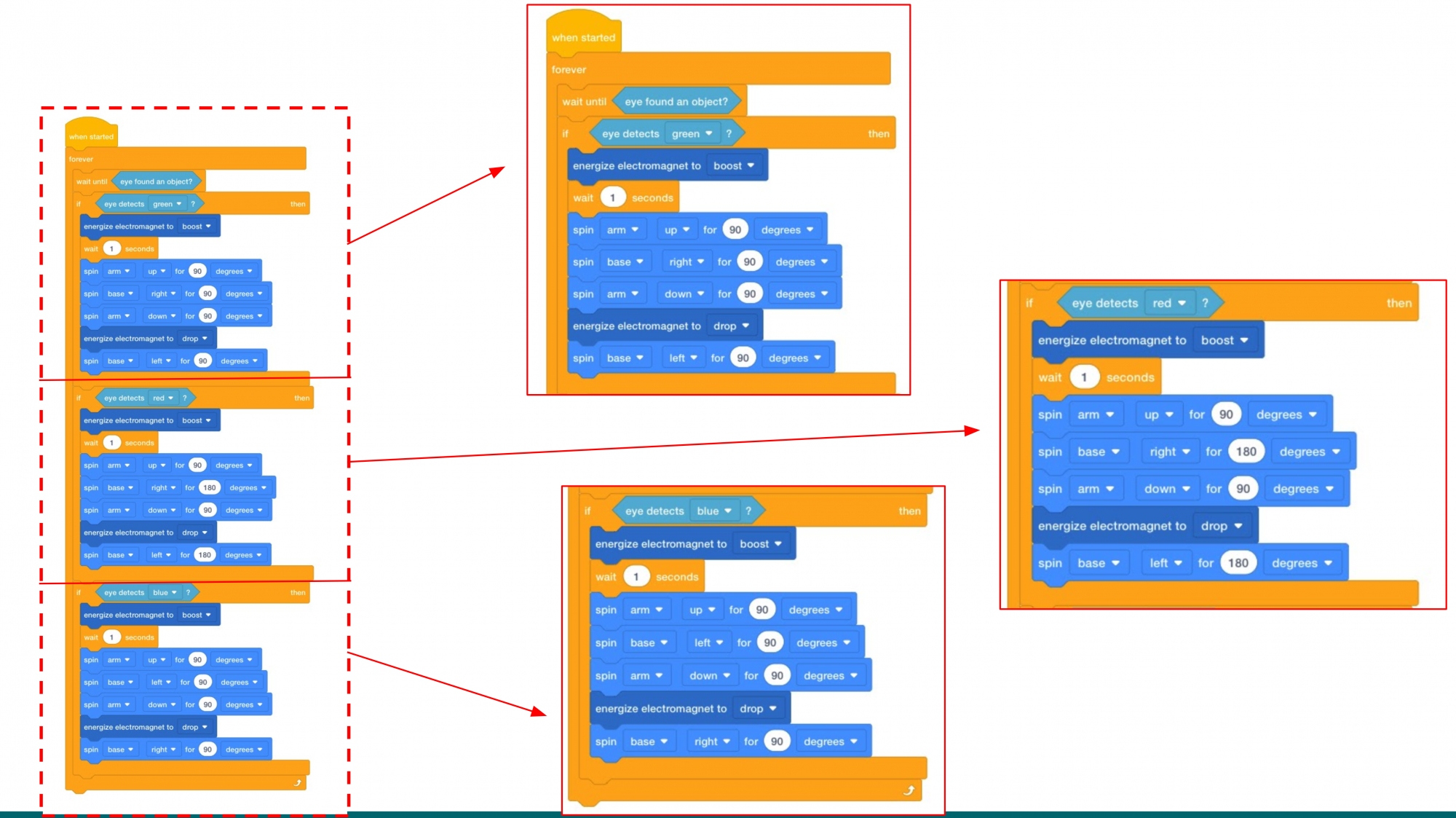
Laboratorio 5 Parte 2 Solución A medida que recorre la sala para verificar el estado de los grupos, pregúnteles algunas de las siguientes preguntas para iniciar un debate.
- ¿Cómo cambiarías el código si quisiéramos que los tres colores terminaran en la misma ubicación?
- Descríbame cómo se moverá el brazo robótico si el sensor ocular detecta el color rojo.
- ¿Qué pasaría si uno de mis bloques [Si entonces] estuviera fuera del bloque [Para siempre]? ¿El brazo robótico funcionaría como se espera? ¿Por qué o por qué no?
- ¿Qué pasa si coloco un rayo naranja delante del sensor ocular? ¿El brazo robótico lo movería? Explique por qué no se moverá en términos del flujo del proyecto.
- RecordarRecordar a los grupos que coloquen sus pilas duplicadas [f then] dentro del
bloque [Forever]. Este es uno de los posibles errores que pueden ocurrir mientras los estudiantes crean
sus proyectos.
¡Recuerde a los estudiantes que está bien intentar y fallar! Puede haber varias versiones antes de crear el proyecto final. Acepta el fracaso, es parte del proceso de aprendizaje.
- PreguntePregunte a los estudiantes en qué se parecen o se diferencian las decisiones
que toma el brazo robótico de las decisiones que toman cada día.
¿Qué trabajos pueden imaginar que impliquen toma de decisiones?