
Jouer
Partie 1 – Étape par étape
- InstruireDites aux élèves qu’ils vont créer un projet dans lequel le bras du robot
déplacera un disque en fonction de sa couleur.
Le bras robotisé attendra qu'un disque soit détecté, vérifiera la couleur du disque et prendra une décision en fonction de cette couleur. Si le disque correspond à la couleur du projet, le bras du soulèvera alors le disque, le déplacera vers une autre partie de la tuile, déposera le disque et reviendra à l'emplacement de départ. Regardez la vidéo ci-dessous pour voir comment le bras robotisé pourrait déplacer le disque avec succès en détectant d'abord le disque, puis en le soulevant pour le déplacer vers un autre emplacement en fonction de sa couleur.
Fichier vidéo - ModèleModélisez comment ajouter le bloc [Si alors] et le bloc [Pour toujours] au projet
avec les élèves. Expliquez que pour cet exemple, le bras du robot recherchera du vert
-
Demandez aux élèves d’ouvrir leur projet Lab 4 Part 2 et de le renommer Lab 5 Part 1.

Nommez le projet - S'il y a des élèves qui n'étaient pas présents au laboratoire 4 ou qui ne trouvent pas leur projet, demandez-leur de recréer la solution de la partie 2 du laboratoire 4 à partir du diaporama d'images du laboratoire 5.

Lab 4 Partie 2 Solution - Avant de commencer, assurez-vous que les élèves ont connecté leur appareil à leur bras robotisé de code (2 axes) et que la configuration de leur projet est définie sur le bras robotisé. Si nécessaire, revoir les étapes pour Configurer un bras de robot et Connecter un cerveau VEX GO, puis modélisez ces étapes pour que les élèves puissent connecter et configurer leur bras robotique.
Remarque : Lorsque vous connectez votre bras robotisé pour la première fois à votre appareil, le gyroscope intégré au cerveau peut s'étalonner, ce qui fait que le bras robotisé se déplace tout seul pendant un moment. Il s'agit d'un comportement attendu, ne touchez pas le bras du robot pendant l'étalonnage.
- Faites glisser le bloc [Si alors] dans l’espace de travail.
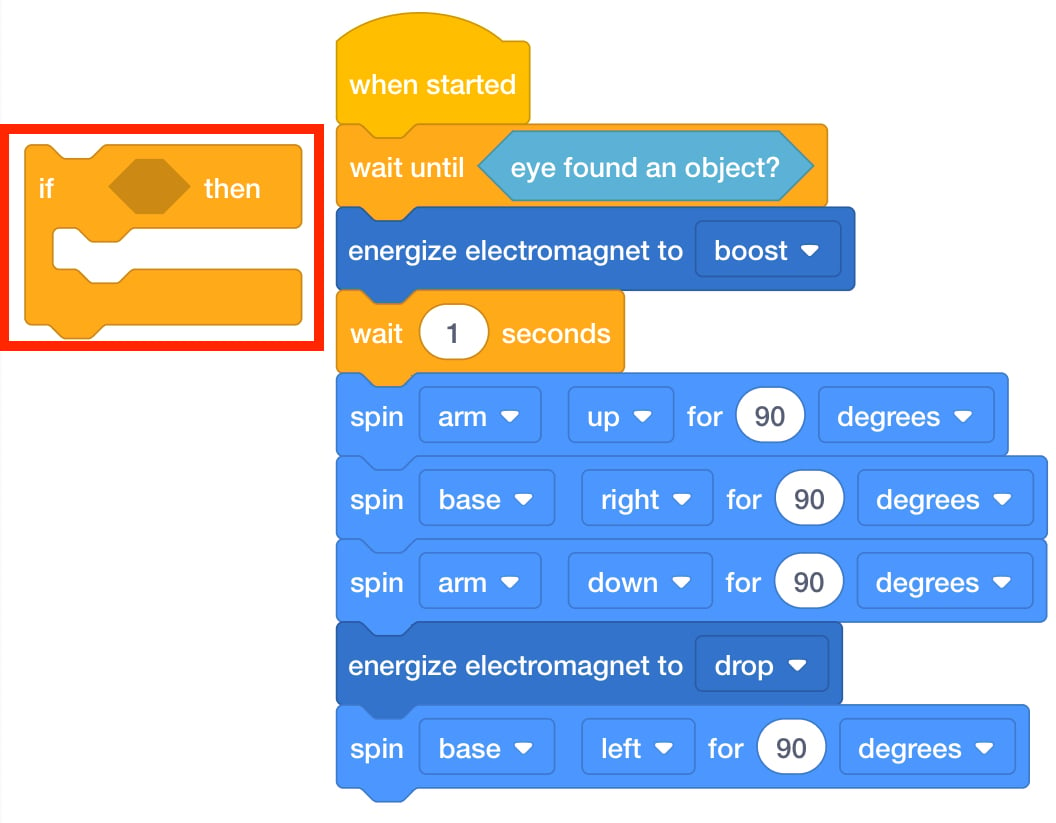
Ajouter un bloc [Si alors] à l'espace de travail - Un bloc [Si alors] peut être ajouté autour des blocs existants. Montrez aux élèves l’ombre qui apparaît pendant l’ajout du bloc. Cette ombre indique où le bloc sera ajouté à la pile.
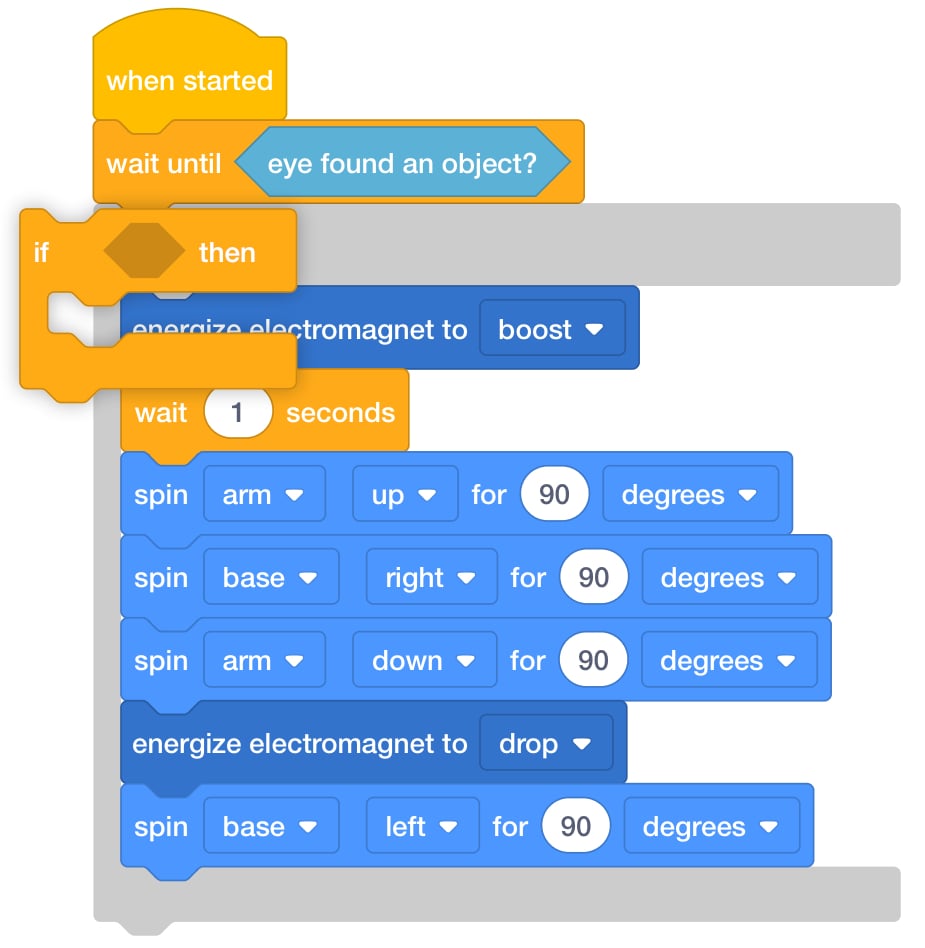
Ajout de [Si alors] à un projet - Demandez aux élèves quelle condition ils souhaitent vérifier (le capteur oculaire détecte un objet d’une couleur spécifique). Faites glisser le bloc <Color sensing> dans le bloc [Si alors].
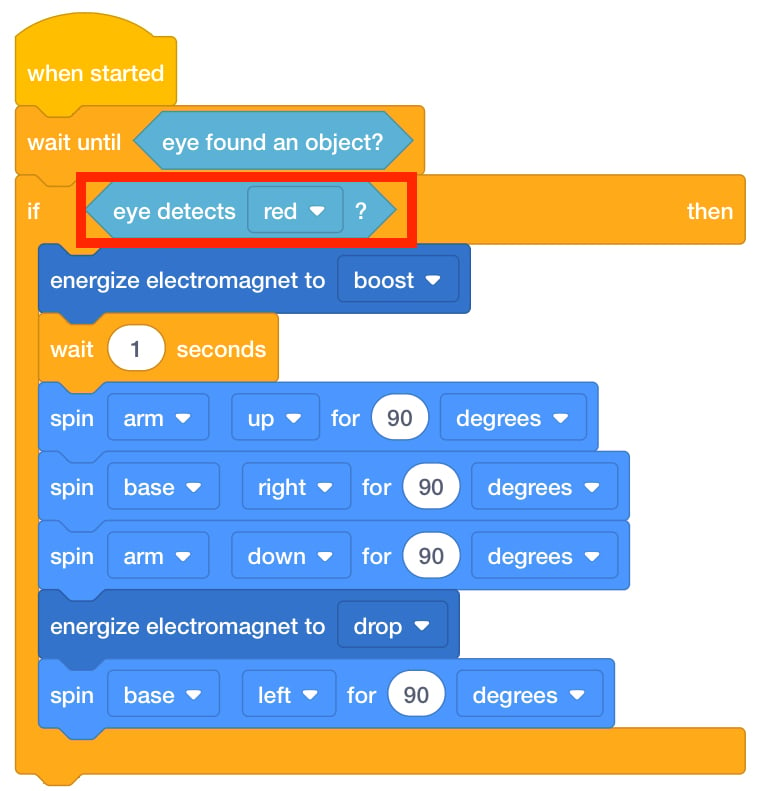
<Color sensing> Bloc ajouté - Expliquez que le bloc <Color sensing> peut être utilisé pour détecter les couleurs des disques : rouge, bleu et vert. Sélectionnez l'option déroulante « vert ».
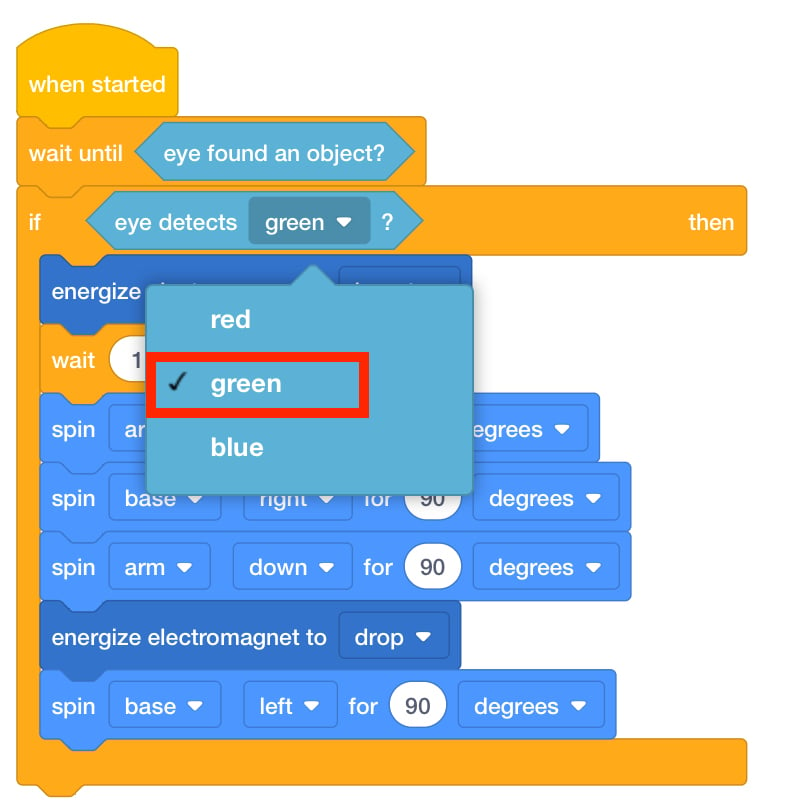
Sélectionnez « vert » - Expliquez que les blocs [Si alors] sont des instructions conditionnelles qui demandent au robot de vérifier une condition, et si la condition est vraie, alors ce bloc s'exécutera.
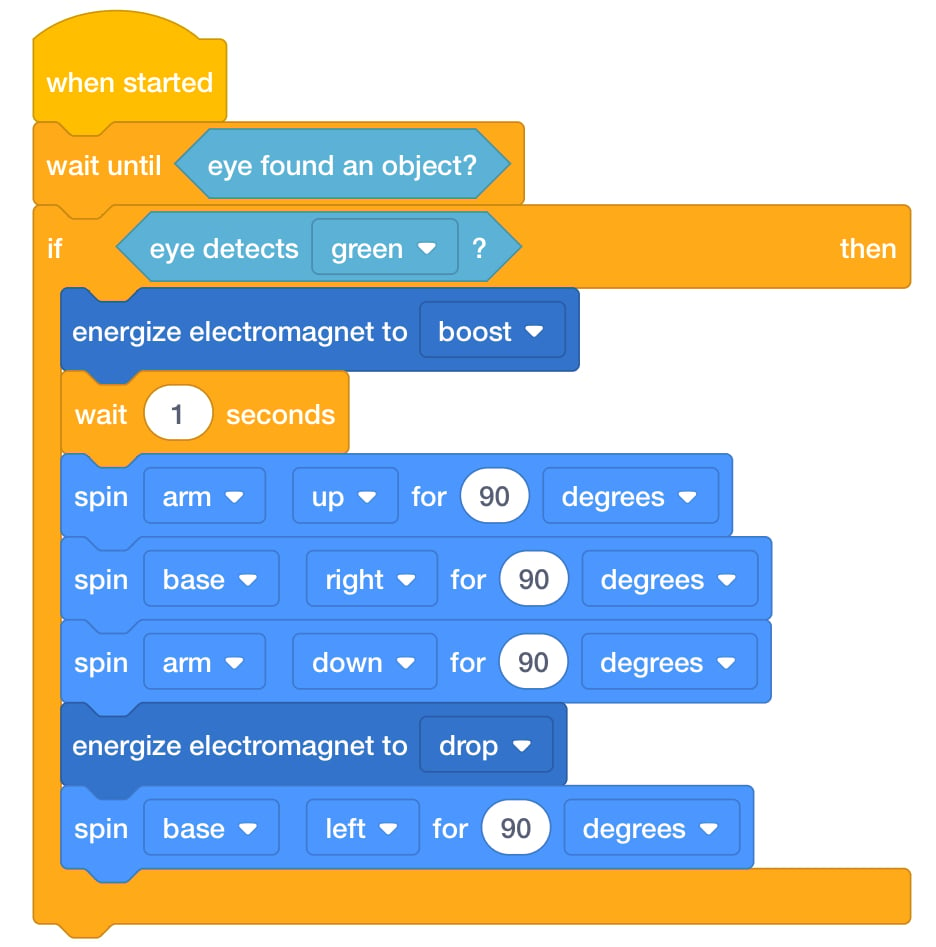
Projet avec le bloc [Si alors] - Demandez aux élèves combien de fois le bras robotique vérifiera la condition <Color sensing> dans ce flux de projet. C'est le nombre de fois qu'ils veulent que cela soit vérifié ? Afin de pouvoir le vérifier à plusieurs reprises, ils devront ajouter un bloc [Forever]. Faites glisser un bloc [Forever] dans l’espace de travail et placez-le autour de la pile de blocs existante.
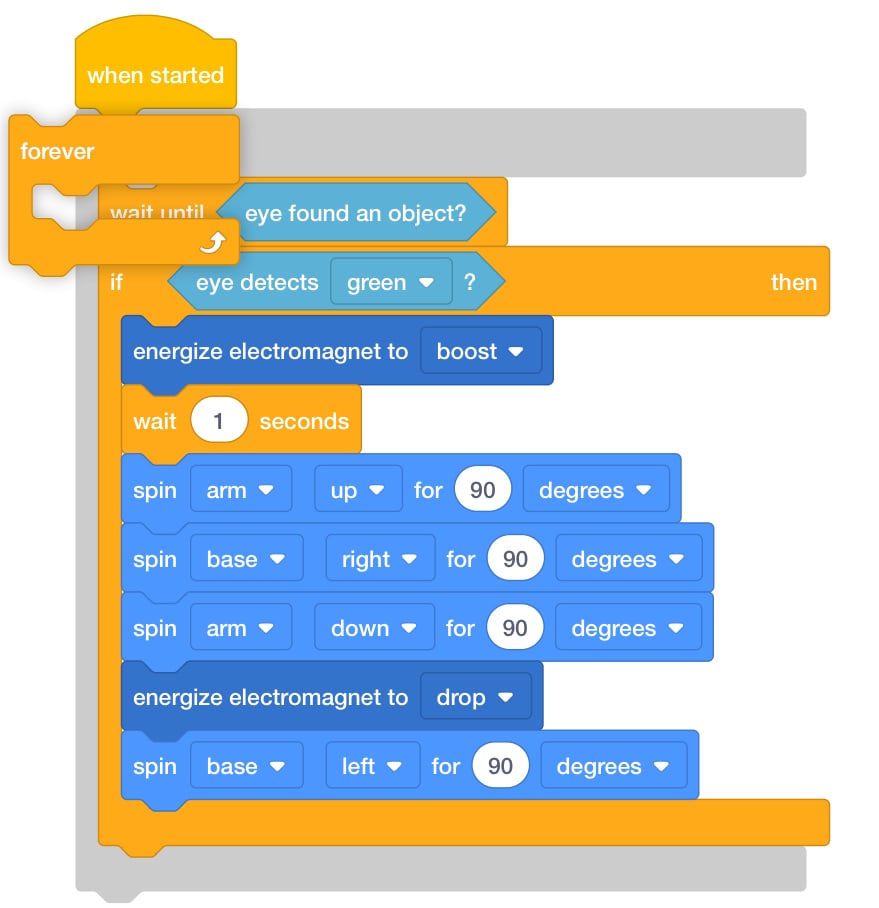
Ajouter [Pour toujours] Bloc - Demandez aux élèves de sélectionner l’une des trois couleurs disponibles dans le bloc <Color
sensing> de leur projet. Ils doivent attacher le disque de la même couleur à l'électroaimant du
bras du robot et démarrer leur projet pour voir comment le bras du déplace le disque.
- Remarque : La solution du Lab 5 Partie 1 variera légèrement en fonction des groupes de couleurs choisis.

Lab 5 Partie 1 Solution -
- FaciliterFaciliter la conversation pendant que les élèves commencent à créer leurs
projets. Encouragez-les à tester leurs projets au fur et à mesure qu’ils les créent.
- Votre projet fonctionne-t-il comme prévu ? Pourquoi ou pourquoi pas ?
- Comment décririez-vous ce que fait le bloc [Forever] dans ce projet ?
- Que pensez-vous qu'il se passerait si nous mettions un disque de couleur différente devant le bras du robot ? Le bras du robot déplacerait-il le disque ? Pourquoi penses-tu ça ?
- Si vous vouliez que le bras du robot ait deux couleurs, quels autres blocs auriez-vous besoin d'ajouter ?
- RappelerRappelez aux groupes de poser des questions s’ils sont confus. S’ils
rencontrent des problèmes lors de l’utilisation des nouveaux blocs, demandez-leur de suivre à nouveau ces
étapes.
Pour les groupes qui ont terminé leur projet, demandez-leur d’aider les groupes qui pourraient avoir besoin de plus d’aide.
- DemanderDemandez aux élèves de décrire les événements survenus en classe ou à la maison
sous forme de phrases « Si... Alors…». Par exemple:
- Si je connais la réponse, alors je lève la main.
- Si la cloche sonne, alors c'est l'heure du déjeuner.
- Si je fais tous mes devoirs, alors j'ai une heure de temps devant un écran.
Pause à mi-jeu & Discussion de groupe
Dès que chaque groupe a codé son bras robotique pour ramasser un disque coloré avec succès, réunissez-vous pour brève conversation.
- Qu'a fait ton bras robotisé ?
- Encouragez les élèves à parler aussi précisément que possible des comportements des robots. Au lieu de « Il a vu un disque rouge », dites « Le capteur oculaire du bras du robot a détecté un disque rouge ».
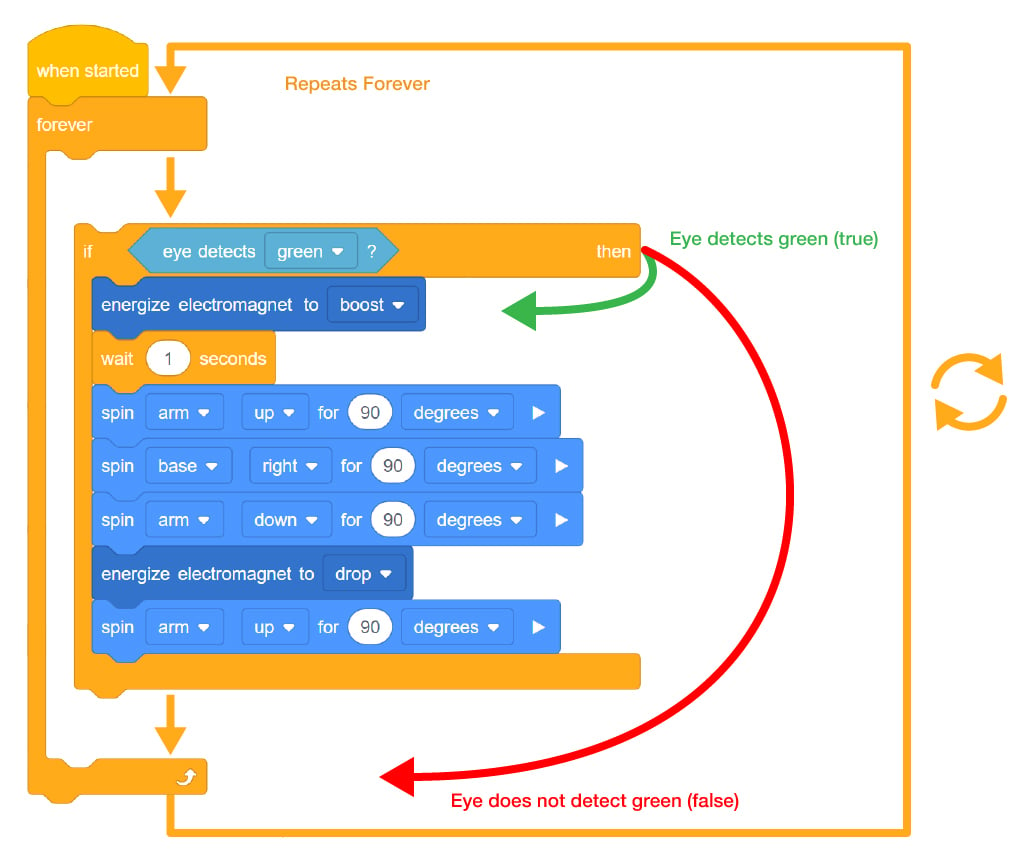
- Comment le bras robotique a-t-il pris des décisions dans nos projets ? Quels blocs avons-nous utilisés pour demander au bras robotique de prendre une décision ?
- Combien de fois le bras robotisé vérifiera-t-il une couleur ? Pourquoi? Et si on supprimait le bloc [Forever] ?
- Utilisez l’image du flux de projet pour faciliter cette conversation.
Partie 2 – Étape par étape
- InstruireDites aux élèves qu'ils vont ajouter à leur projet le bras du robot qui
déplacera des disques colorés vers différents emplacements en fonction de leur couleur. Regardez la vidéo
ci-dessous pour voir comment le bras robotisé pourrait déplacer les trois disques avec succès en détectant
d'abord le disque, puis en le soulevant pour le déplacer vers un autre emplacement en fonction de la
couleur.
Fichier vidéo
- ModèleModélisez pour les élèves les étapes à ajouter à leur projet pour demander au
bras robotique de déplacer les disques vers différents emplacements en fonction de la couleur.
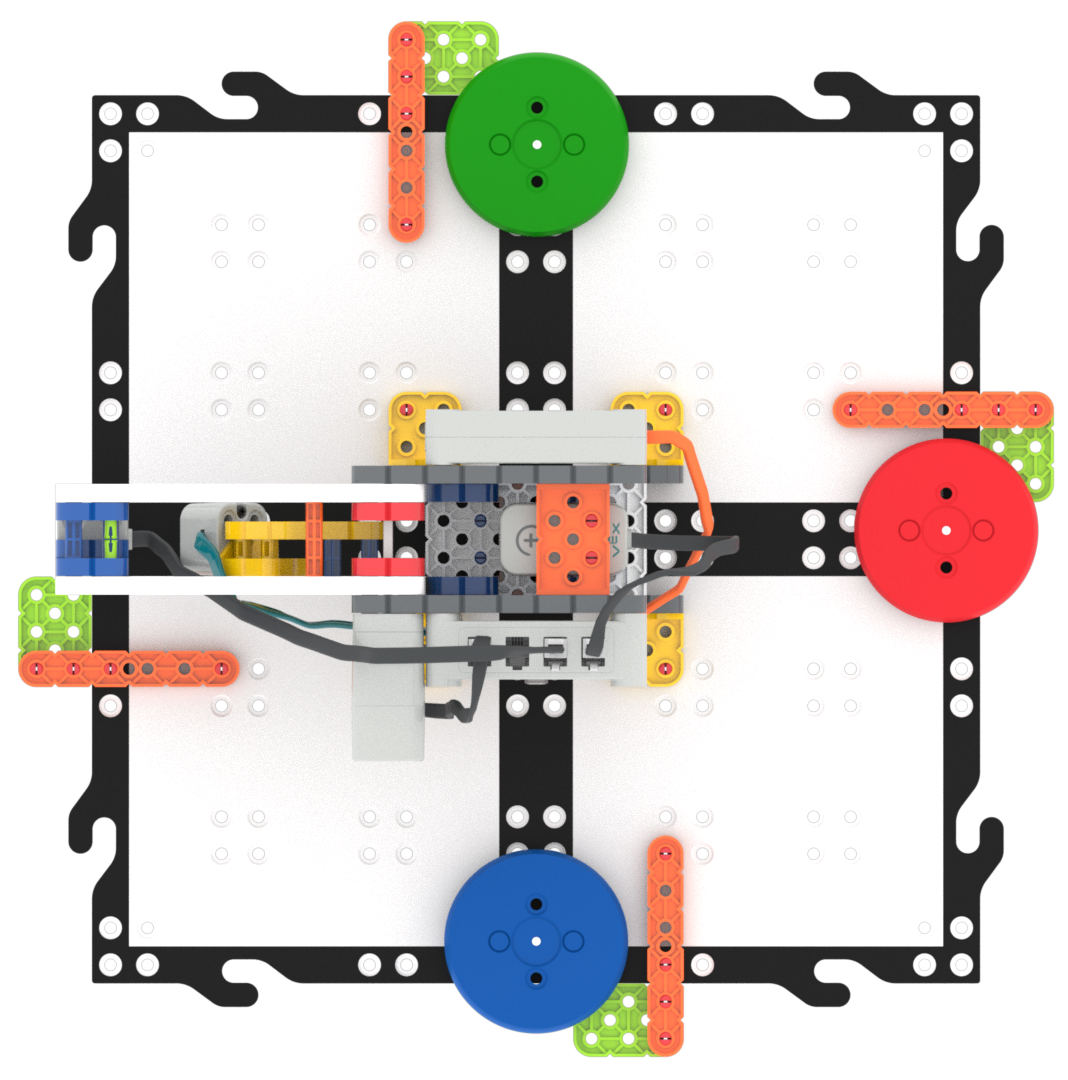
Emplacements de disque - Demandez à chaque groupe de lancer VEXcode GO sur son appareil et d’ouvrir son projet Lab 5 Part 1. Le nouveau projet s’appuiera sur ce projet.
-
Les étudiants devront enregistrer leur projet avec un nouveau nom au début du laboratoire. Have them select “Save As” or "Save to Your Device" (depending on which VEXcode GO version you are using) from the File Menu and save their project as Lab 5 Part 2. Si plusieurs groupes travaillent sur le même appareil, demandez-leur d’ajouter leur nom de groupe au projet.

Nommez le projet - Avant de commencer, assurez-vous que les élèves ont connecté leur appareil à leur bras robotisé de code (2 axes) et que le bras robotisé est configuré. Si nécessaire, passez en revue les étapes pour Configurer un bras de robot et Connecter un cerveau VEX GO, puis modélisez ces étapes pour que les élèves puissent connecter et configurer leur bras robot.
- À l’heure actuelle, le bras robotisé dispose d’instructions sur ce qu’il faut faire lorsqu’un disque vert est détecté. En dupliquant les blocs, les instructions pour d'autres couleurs peuvent être rapidement créées.
- Modélisez comment dupliquer des blocs en cliquant avec le bouton droit de la souris ou en appuyant sur le bloc [Si alors].

Menu contextuel - Dupliquez le bloc [Si alors] deux fois et ajoutez-les sous le premier bloc [Si alors].
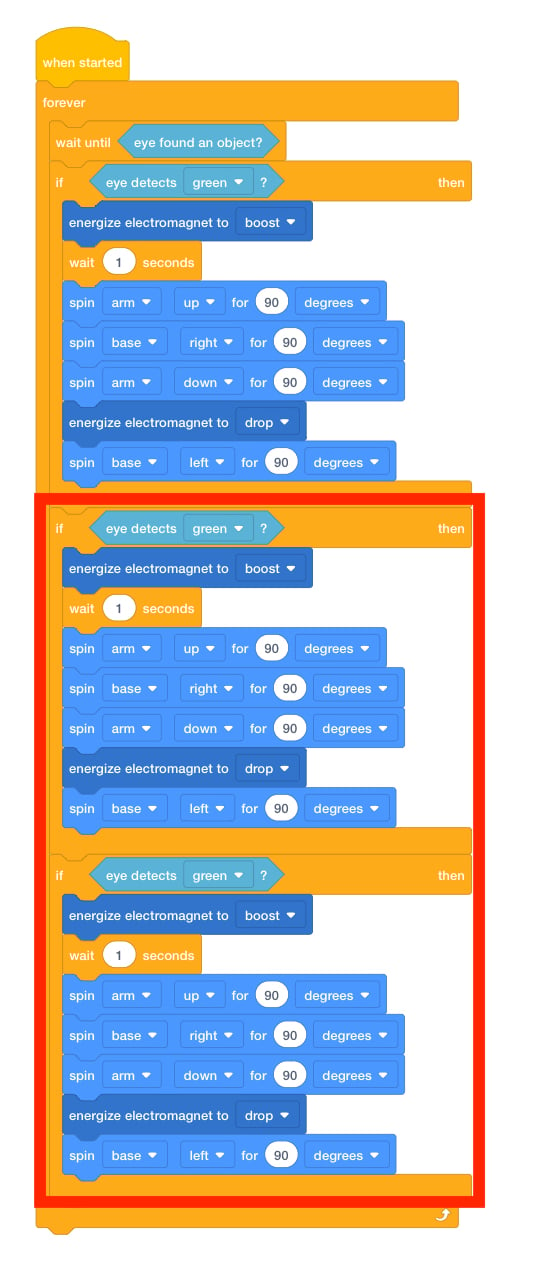
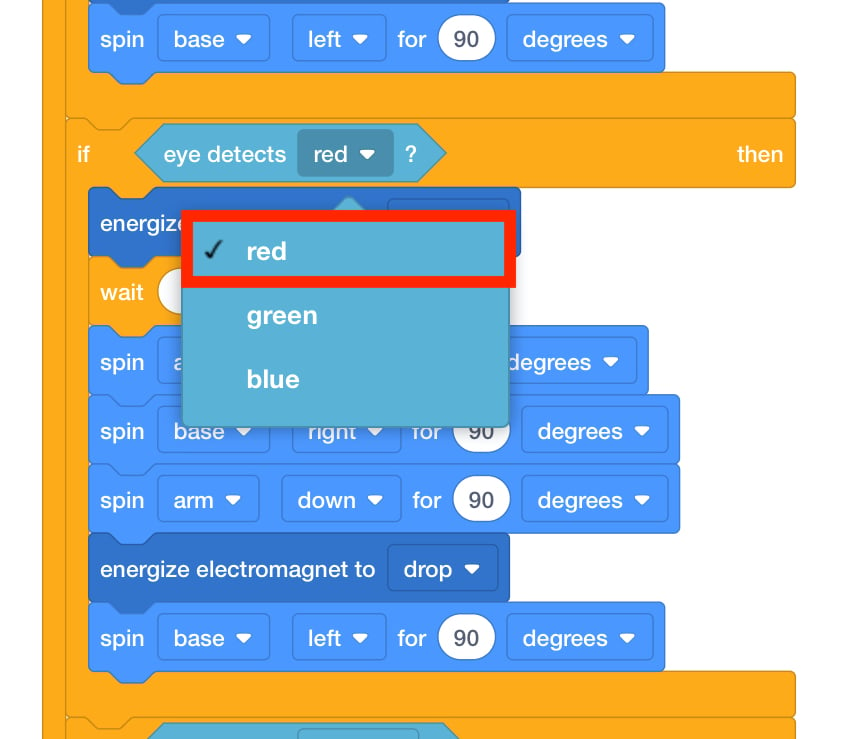
Blocs en double - Expliquez aux élèves qu’ils doivent remplacer le bloc <Color sensing> à l’intérieur des blocs [Si alors] nouvellement ajoutés par les couleurs de disque supplémentaires. Remplacez le deuxième bloc <Color sensing> par « rouge ».
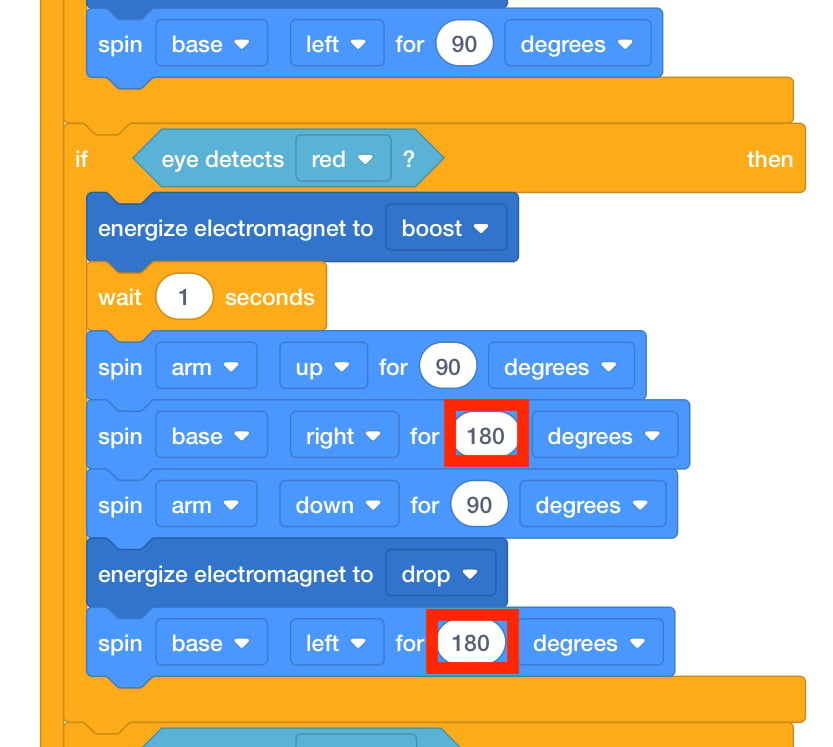
Passer au « rouge » - Les blocs à l'intérieur de ce bloc [Si alors] doivent être modifiés pour indiquer au bras du robot où placer un disque rouge. Modifiez les paramètres des blocs [Spin pour] qui contrôlent le moteur de base pour qu'il tourne à 180 degrés dans chaque direction.
Changer le lieu de dépôt - Maintenant que le bras robotique sait où déplacer les disques rouges ou verts, demandez aux élèves de modifier la pile finale. Dans cette pile, le bras robotique déplacera tous les disques bleus vers leur emplacement désigné.
- Demandez aux élèves de placer un disque sur l’électroaimant et de démarrer le projet et de voir comment leur bras robotique se déplace. Rappelez-leur qu’ils doivent démarrer le projet avec un disque attaché à l’électro-aimant. Review the steps in Starting a Project in VEXcode GO if necessary.
- Demandez aux élèves tester leurs projets plusieurs fois avec tous les disques colorés pour s’assurer qu’ils fonctionnent comme prévu.
- FaciliterFaciliter les conversations sur les instructions conditionnelles dans le flux
du projet, pendant que les élèves modifient les paramètres et testent leurs projets. Utilisez la solution
fournie dans le diaporama du Lab 5 pour vérifier leurs projets au fur et à mesure de leur diffusion.
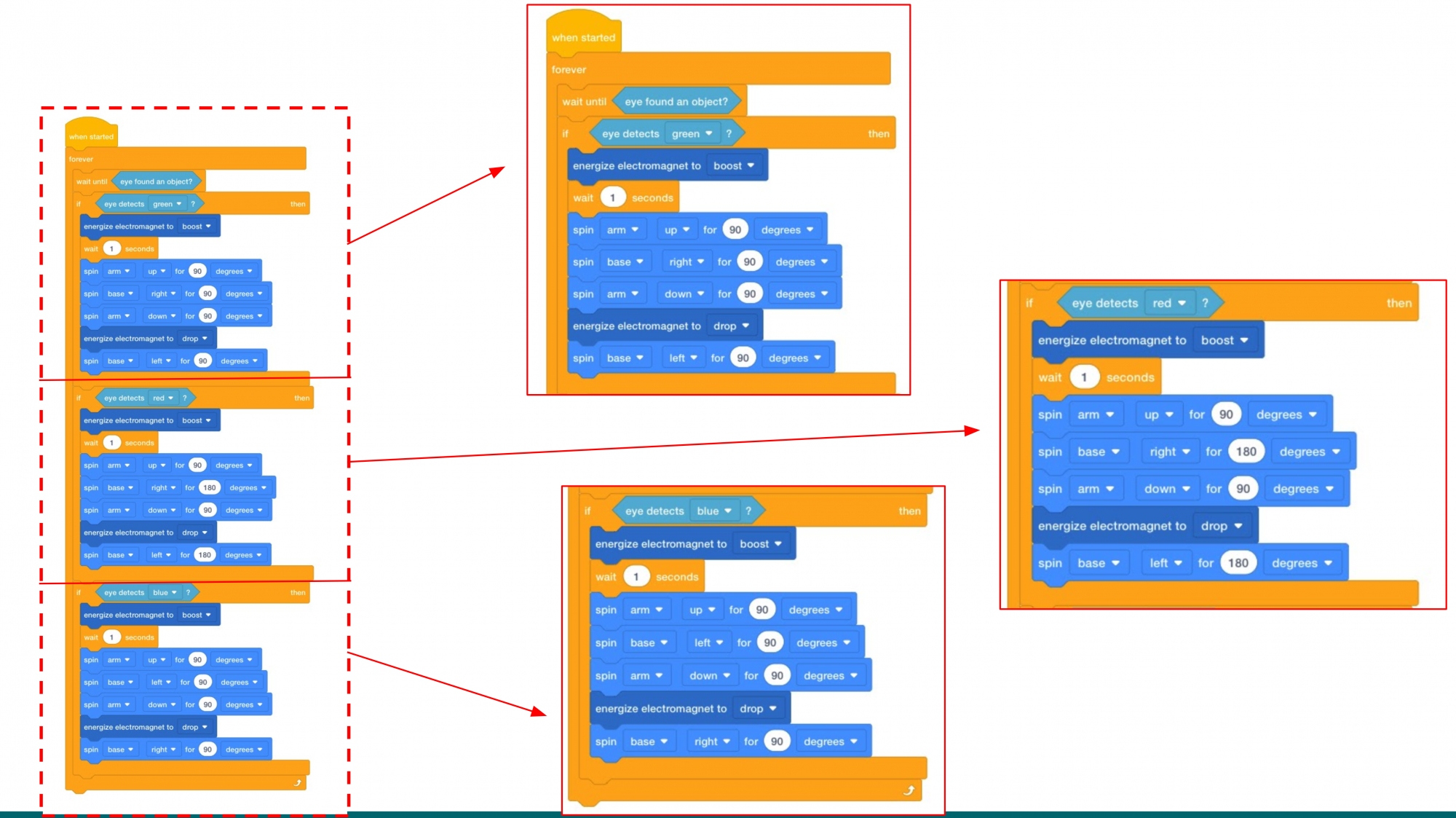
Lab 5 Partie 2 Solution Pendant que vous circulez dans la salle pour vérifier les groupes, posez-leur certaines des questions suivantes pour susciter une discussion.
- Comment modifieriez-vous le code si nous voulions que les trois couleurs se retrouvent au même endroit ?
- Décrivez-moi comment le bras du robot se déplacera si le capteur oculaire détecte la couleur rouge.
- Que se passerait-il si l’un de mes blocs [Si alors] était en dehors du bloc [Pour toujours] ? Le bras robotisé fonctionnerait-il comme prévu ? Pourquoi ou pourquoi pas ?
- Que se passe-t-il si je place un faisceau orange devant le capteur oculaire ? Le bras du robot le déplacerait-il ? Expliquez pourquoi cela n’évolue pas en termes de flux de projet.
- RappelerRappeler aux groupes de placer leurs piles [f then] dupliquées à l'intérieur du
bloc [Forever]. C’est l’une des erreurs possibles qui peuvent survenir lorsque les étudiants créent leurs
projets.
Rappelez aux élèves qu’il est normal d’essayer et d’échouer ! Il peut y avoir plusieurs versions avant de créer leur projet final. Acceptez l’échec, cela fait partie du processus d’apprentissage.
- DemanderDemandez aux élèves en quoi les décisions prises par le bras robotisé sont
similaires ou différentes des décisions qu’ils prennent chaque jour.
À quels emplois pourraient-ils penser qui font appel à la prise de décision ?