
Spielen
Teil 1 - Schritt für Schritt
- AnweisungenWeisen Sie die Schüler an, ein Projekt zu erstellen, bei dem der Roboterarm
eine Scheibe basierend auf ihrer Farbe bewegt.
Der Roboterarm wartet, bis eine Diskette erkannt wird, überprüft die Farbe der Diskette und trifft auf Grundlage dieser Farbe eine Entscheidung. Wenn die Scheibe mit der Farbe im Projekt übereinstimmt, hebt der Roboterarm die Scheibe an, bewegt sie zu einem anderen Teil der Kachel, lässt die Scheibe fallen und kehrt zum Ausgangspunkt zurück. Sehen Sie sich das Video unten an, um zu erfahren, wie der Roboterarm die Scheibe erfolgreich bewegen konnte, indem er sie zunächst erfasste und sie dann anhob, um sie basierend auf ihrer Farbe an eine andere Stelle zu bewegen.
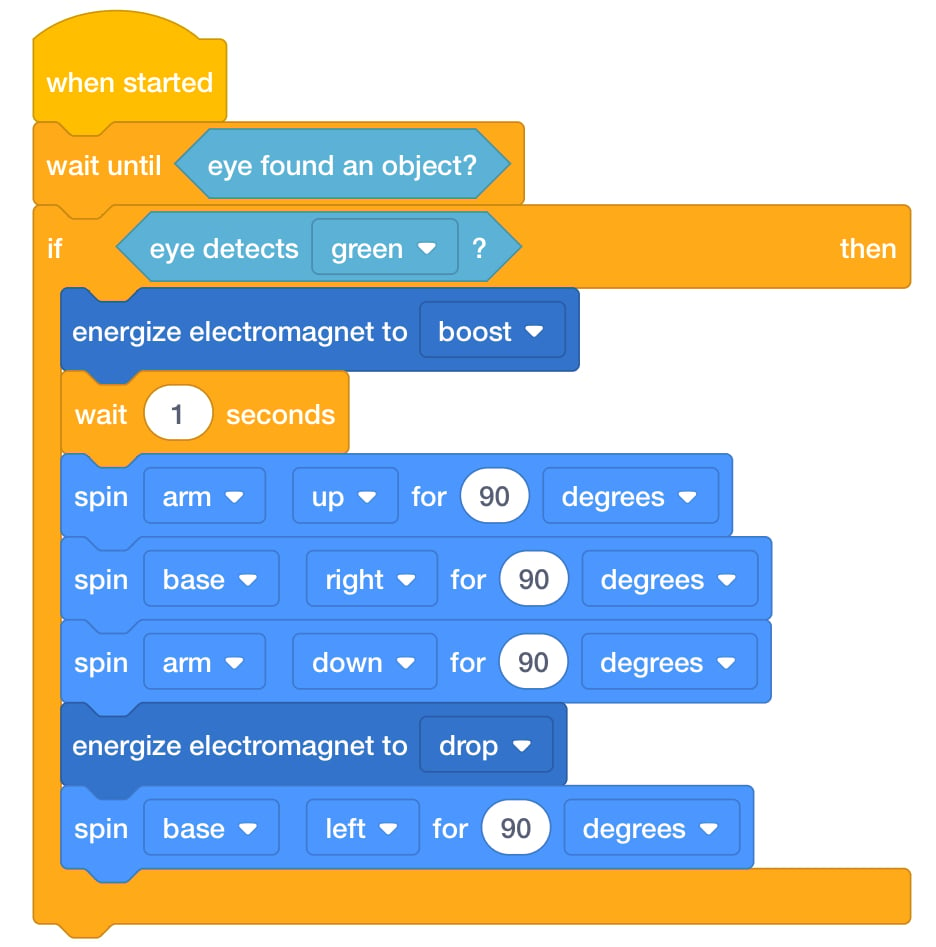
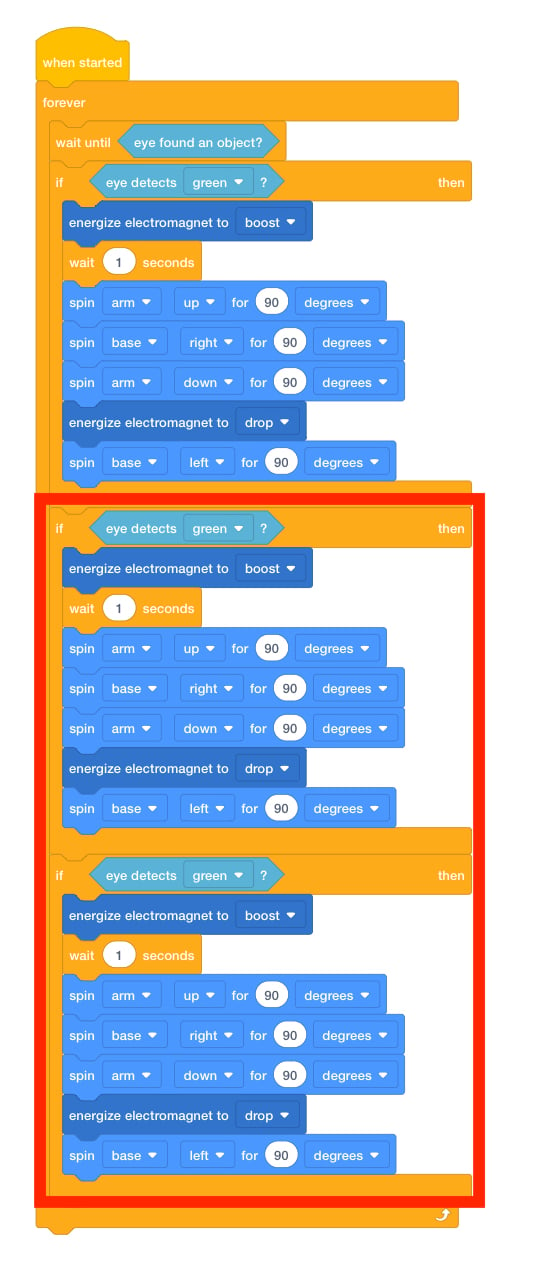
Videodatei - ModellModellieren Sie mit den Schülern, wie Sie dem Projekt die Blöcke [Wenn dann] und
[Für immer] hinzufügen. Erklären Sie, dass der Roboterarm in diesem Beispiel nach Grün sucht.
-
Lassen Sie die Schüler ihr Projekt Labor 4 Teil 2 öffnen und es Labor 5 Teil 1umbenennen.

Projekt benennen - Falls Schüler bei Übung 4 nicht anwesend waren oder ihr Projekt nicht finden können, lassen Sie sie die Lösung für Übung 4, Teil 2, aus der Bilder-Diashow zu Übung 5 neu erstellen.

Labor 4 Teil 2 Lösung - Stellen Sie vor dem Beginn sicher, dass die Schüler ihr Gerät mit ihrem Code Robot Arm (2-Achsen) verbunden haben und dass die Konfiguration ihres Projekts auf den Roboterarm eingestellt ist. Wenn Falls erforderlich, überprüfen Sie die Schritte dazuKonfigurieren Sie einen Roboterarm Und Verbinden ein VEX GO Brain, Modellieren Sie dann diese Schritte, damit die Schüler ihren Roboterarm verbinden und konfigurieren können.
Hinweis: Wenn Sie Ihren Roboterarm zum ersten Mal an Ihr Gerät anschließen, wird der im Gehirn integrierte Gyro möglicherweise kalibriert, wodurch sich der Roboterarm für einen Moment von selbst bewegt. Dies ist ein erwartetes Verhalten. Berühren Sie den Roboterarm während der Kalibrierung nicht.
- Ziehen Sie den Block [Wenn dann] in den Arbeitsbereich.
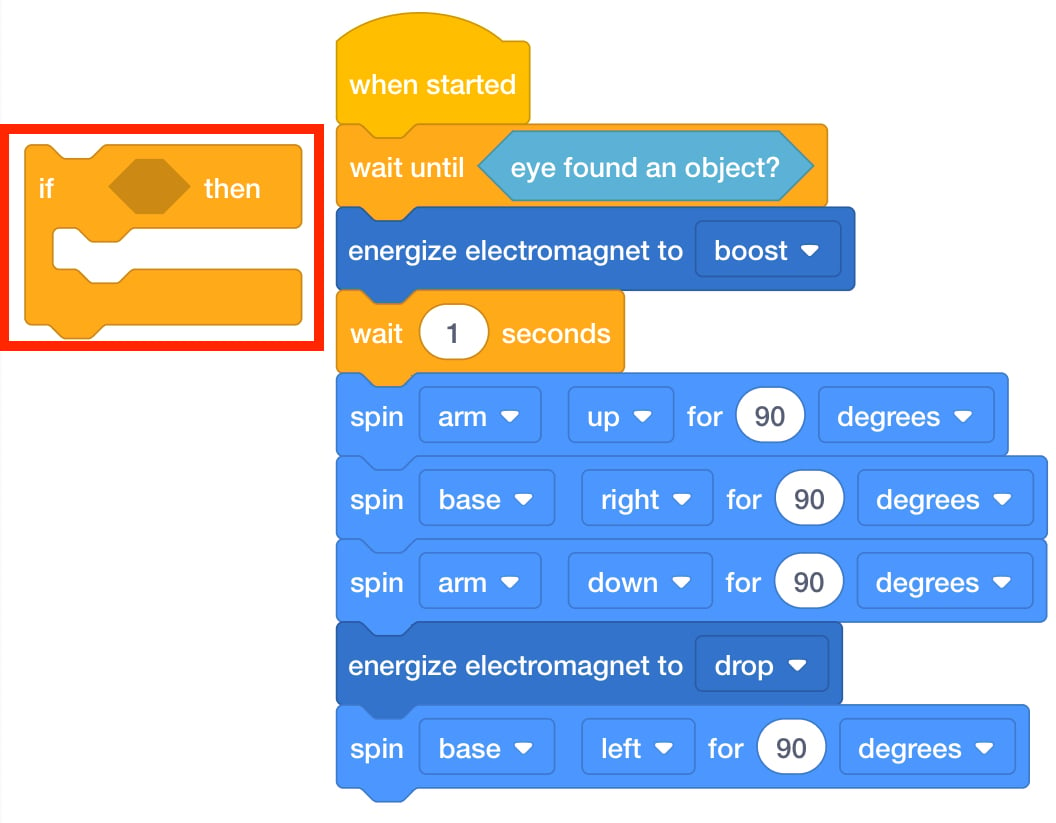
Füge einen [Wenn dann]-Block zum Arbeitsbereich hinzu - Um bestehende Blöcke herum kann ein [Wenn dann]-Block hinzugefügt werden. Zeigen Sie den Schülern den Schatten, der beim Hinzufügen des Blocks erscheint. Dieser Schatten zeigt an, wo der Block zum Stapel hinzugefügt wird.
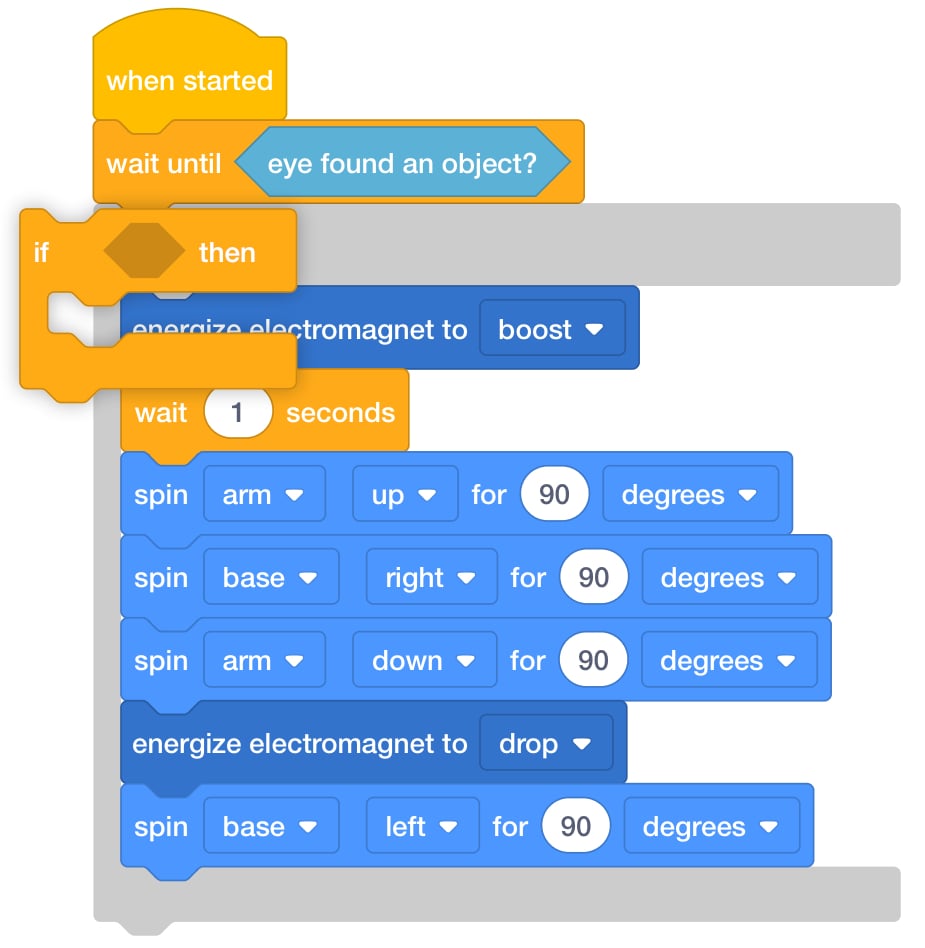
Hinzufügen von [Wenn dann] zu einem Projekt - Fragen Sie die Schüler, welchen Zustand sie überprüfen möchten (der Augensensor erkennt ein Objekt einer bestimmten Farbe). Ziehen Sie den Block <Color sensing> in den Block [Wenn dann].
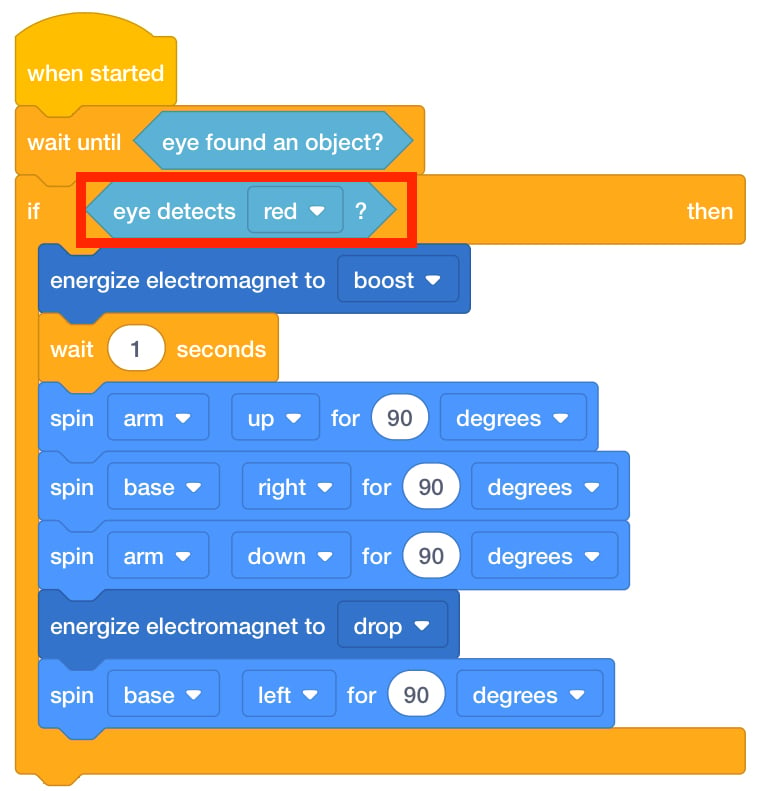
<Color sensing> Block hinzugefügt - Erklären Sie, dass der Block <Color sensing> zum Erkennen der Farben der Scheiben verwendet werden kann: Rot, Blau und Grün. Wählen Sie die „grüne“ Dropdown-Option.
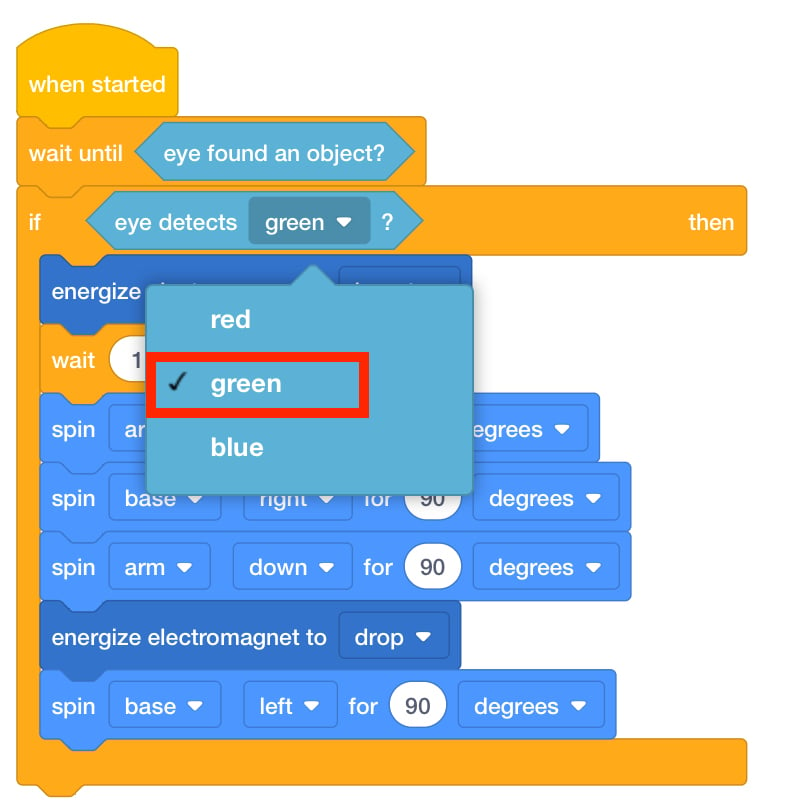
Wählen Sie „grün“ - Erklären Sie, dass [Wenn dann]-Blöcke bedingte Anweisungen sind, die den Roboter anweisen, eine Bedingung zu überprüfen, und dass dieser Block ausgeführt wird, wenn die Bedingung erfüllt ist.
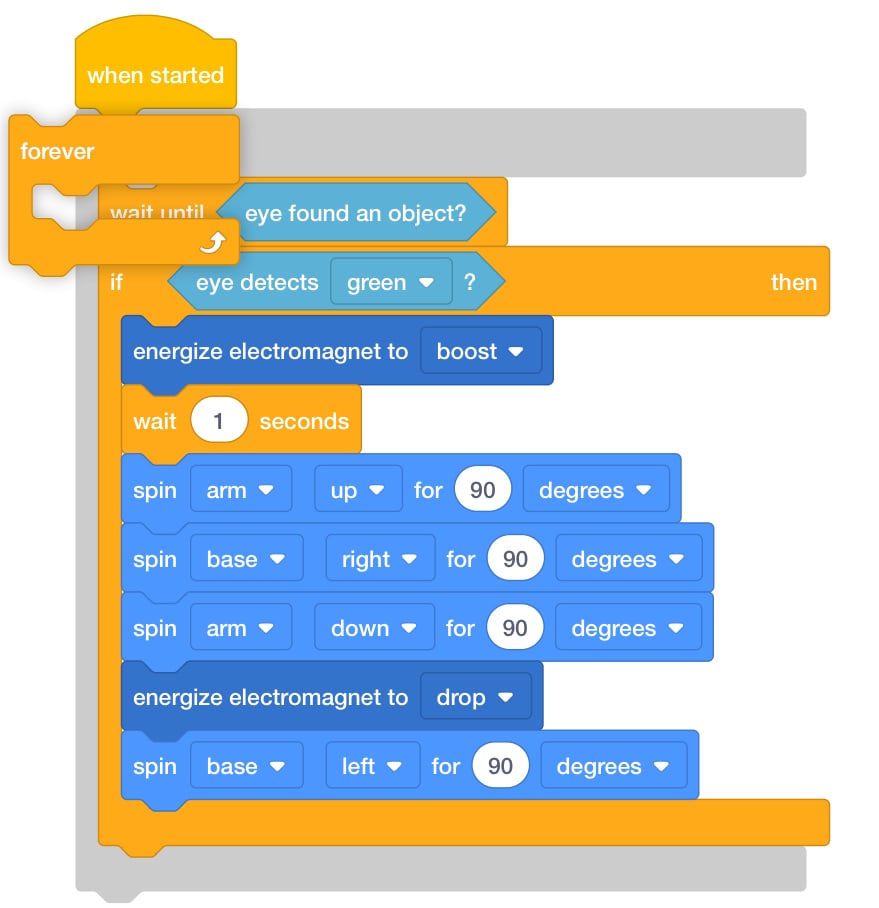
Projekt mit dem [Wenn dann] Block - Fragen Sie die Schüler, wie oft der Roboterarm in diesem Projektablauf die Bedingung <Color sensing> überprüft. Wollen Sie, dass es so oft überprüft wird? Um es wiederholt zu überprüfen, müssen Sie einen [Für immer]-Block hinzufügen. Ziehen Sie einen [Für immer]-Block in den Arbeitsbereich und platzieren Sie ihn um den vorhandenen Stapel aus Blöcken herum.
[Für immer] Block hinzufügen- Weisen Sie die Schüler an, in ihrem Projekt eine der drei im Block <Color sensing> verfügbaren
Farben auszuwählen. Sie sollten die gleichfarbige Scheibe am Elektromagneten am Roboterarm befestigen
und ihr Projekt starten, um zu sehen, wie der Roboterarm die Scheibe bewegt.
- Hinweis: Die Lösung für Labor 5, Teil 1, variiert leicht, je nach gewählten Farbgruppen.

Labor 5 Teil 1 Lösung -
- ModerierenModerieren Sie die Konversation, wenn die Schüler mit der Erstellung ihrer
Projekte beginnen. Ermutigen Sie sie, ihre Projekte während der Erstellung zu testen.
- Funktioniert Ihr Projekt wie vorgesehen? Warum oder warum nicht?
- Wie würden Sie die Funktion des Blocks [Forever] in diesem Projekt beschreiben?
- Was würde Ihrer Meinung nach passieren, wenn wir eine andersfarbige Scheibe vor den Roboterarm legen würden? Würde der Roboterarm die Scheibe bewegen? Warum denken Sie das?
- Wenn Sie möchten, dass der Roboterarm zwei Farben sortiert, welche anderen Blöcke müssten Sie hinzufügen?
- ErinnernErinnern Sie Gruppen daran, Fragen zu stellen, wenn sie verwirrt sind. Wenn bei
der Verwendung der neuen Blöcke Probleme auftreten, lassen Sie sie diese Schritte erneut ausführen.
Bitten Sie Gruppen, die ihr Projekt abgeschlossen haben, den Gruppen zu helfen, die möglicherweise mehr Unterstützung benötigen.
- FrageBitten Sie die Schüler, Ereignisse im Klassenzimmer oder zu Hause als „Wenn …
Dann…“-Sätze zu beschreiben. Zum Beispiel:
- Wenn weiß ich die Antwort, , dann hebe ich die Hand.
- Wenn es klingelt, dann ist es Zeit zum Mittagessen.
- Wenn ich alle meine Hausaufgaben erledigt habe, dann habe ich eine Stunde Bildschirmzeit.
Spielpause & Gruppendiskussion
Sobald jede Gruppe ihren Roboterarm erfolgreich so codiert hat, dass er eine farbige Scheibe aufhebt, kommen Sie zu einem kurzen Gespräch zusammen.
- Was hat Ihr Roboterarm gemacht?
- Ermutigen Sie die Schüler, so konkret wie möglich über das Verhalten des Roboters zu sprechen. Statt „Er hat eine rote Scheibe gesehen“ sagen Sie „Der Augensensor des Roboterarms hat eine rote Scheibe erkannt.“
- Wie hat der Roboterarm in unseren Projekten Entscheidungen getroffen? Welche Blöcke haben wir verwendet, um dem Roboterarm eine Anweisung zu geben, eine Entscheidung zu treffen?
- Wie oft prüft der Roboterarm, ob eine Farbe vorhanden ist? Warum? Was wäre, wenn wir die Sperre [Für immer] entfernen würden?
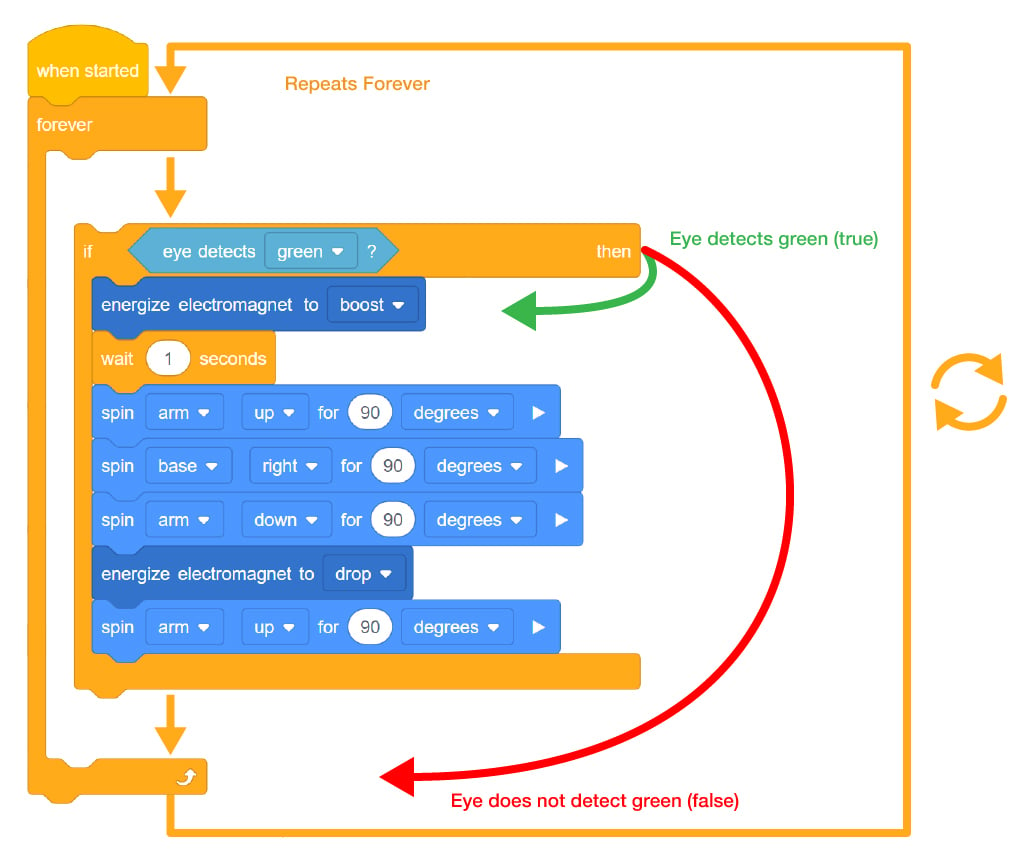
- Verwenden Sie das Projektflussbild, um dieses Gespräch zu erleichtern.
Teil 2 - Schritt für Schritt
- AnweisungWeisen Sie die Schüler an, zu ihrem Projekt hinzuzufügen, dass der Roboterarm
farbige Scheiben je nach Farbe an unterschiedliche Orte bewegen soll. Sehen Sie sich das Video unten an,
um zu erfahren, wie der Roboterarm die drei Scheiben erfolgreich bewegen konnte, indem er die Scheibe
zuerst erfasste und sie dann anhob, um sie je nach Farbe an eine andere Stelle zu bewegen.
Videodatei
- ModellModellieren Sie den Schülern die Schritte, die sie zu ihrem Projekt hinzufügen
müssen, um den Roboterarm anzuweisen, Scheiben je nach Farbe an unterschiedliche Orte zu verschieben.
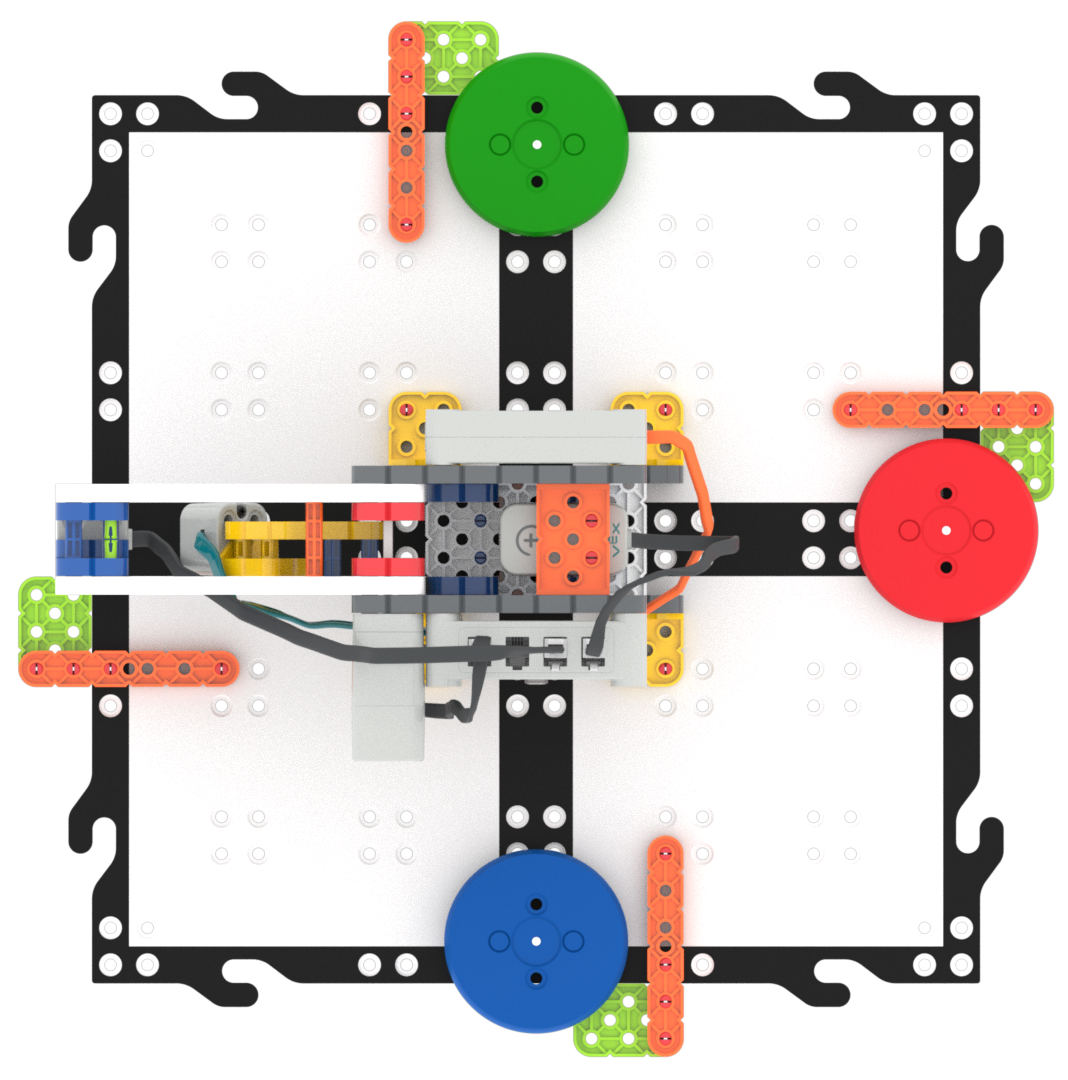
Datenträgerstandorte - Lassen Sie jede Gruppe VEXcode GO auf ihrem Gerät starten und ihr Projekt Lab 5 Part 1 öffnen. Das neue Projekt wird auf diesem Projekt aufbauen.
-
Die Studierenden müssen ihr Projekt zu Beginn des Labors unter einem neuen Namen speichern. Haben Sie wählen „Speichern unter“ oder „Auf Ihrem Gerät speichern“ (je nachdem, welche VEXcode GO-Version Sie verwenden). aus dem Dateimenü und Speichern Sie ihr Projekt als Labor 5 Teil 2. Wenn mehrere Gruppen am selben Gerät arbeiten, lassen Sie sie ihren Gruppennamen zum Projekt hinzufügen.

Projekt benennen - Stellen Sie vor dem Beginn sicher, dass die Schüler ihr Gerät mit ihrem Code Robot Arm (2-Achsen) verbunden haben und dass der Roboterarm konfiguriert ist. Überprüfen Sie bei Bedarf die Schritte zu Konfigurieren Sie einen Roboterarm Und Verbinden ein VEX GO Brain, Modellieren Sie dann diese Schritte, damit die Schüler ihren Roboterarm verbinden und konfigurieren können.
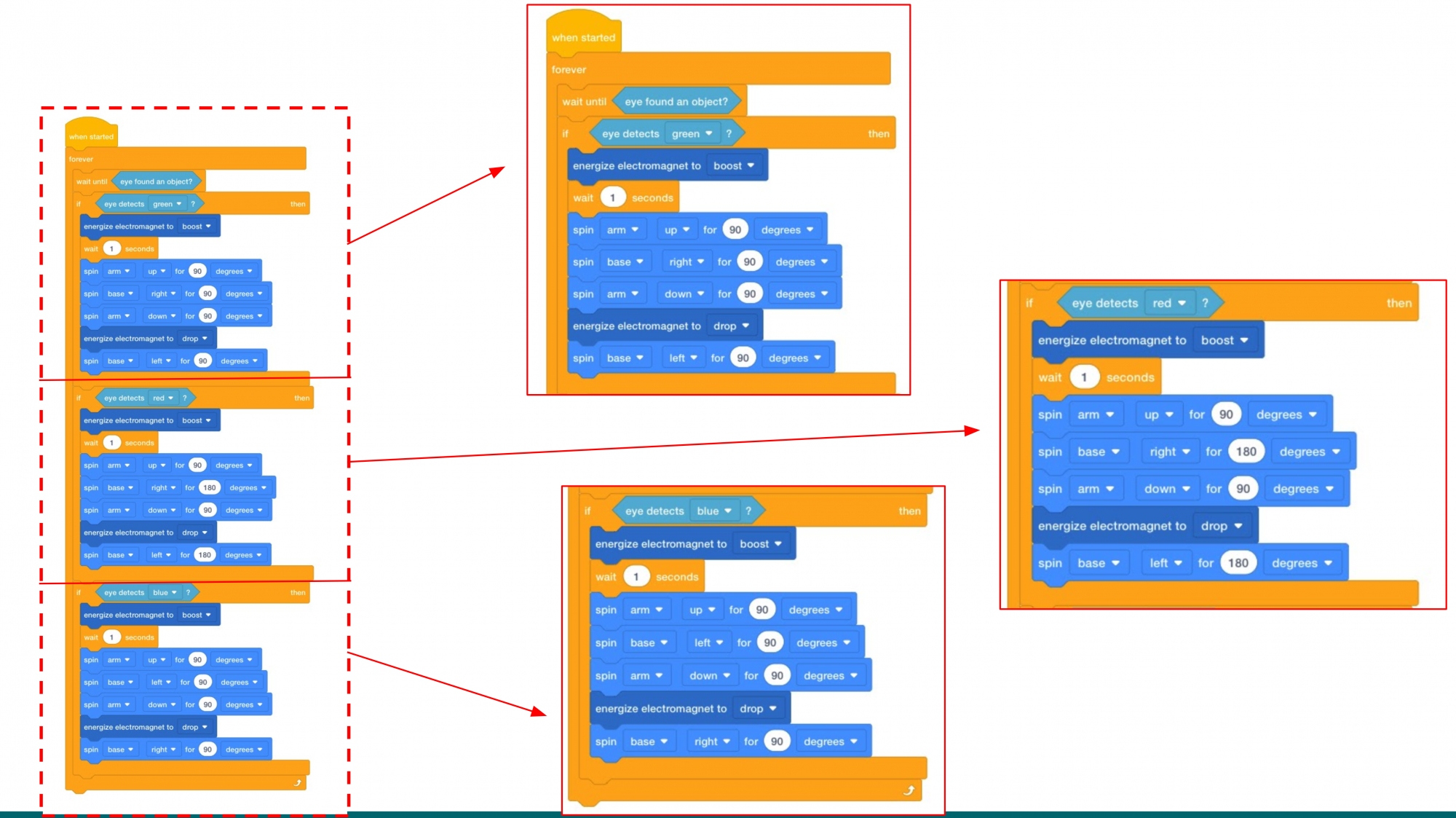
- Derzeit verfügt der Roboterarm über Anweisungen, was zu tun ist, wenn eine grüne Scheibe erkannt wird. Durch Duplizieren der Blöcke können schnell die Anleitungen für andere Farben erstellt werden.
- Modellieren Sie, wie Sie Blöcke durch einen Rechtsklick oder Drücken auf den Block [Wenn dann] duplizieren.

Kontextmenü - Duplizieren Sie den Block [Wenn dann] zweimal und fügen Sie ihn unter dem ersten Block [Wenn dann] ein.
Doppelte Blöcke - Erklären Sie den Schülern, dass sie den <Color sensing> Block innerhalb der neu hinzugefügten [Wenn dann]-Blöcke in die zusätzlichen Scheibenfarben ändern müssen. Ändern Sie den zweiten <Color sensing> Block in „rot“.
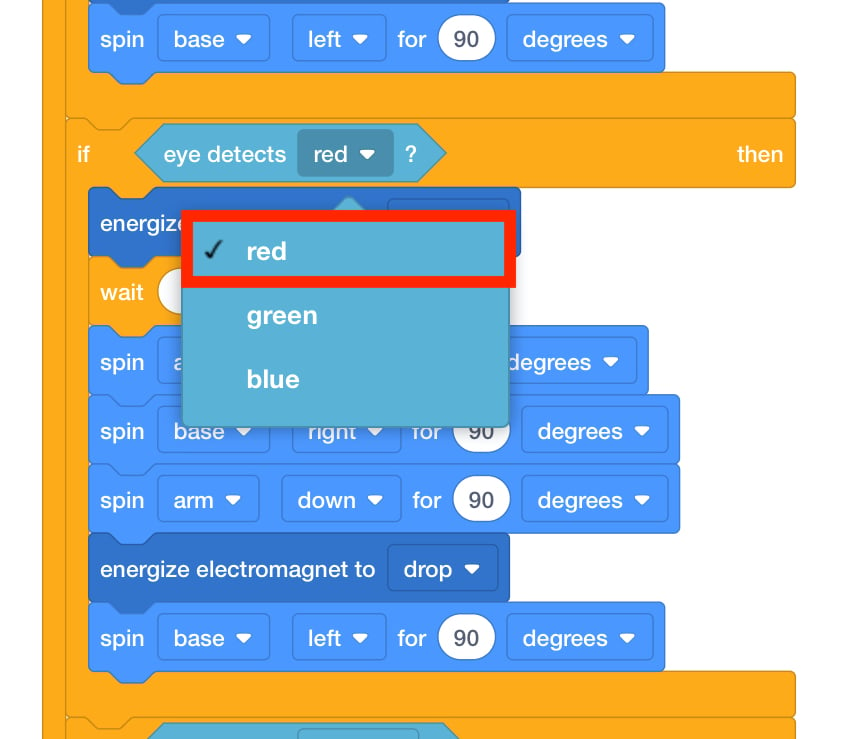
Änderung auf 'rot' - Die Blöcke in diesem [Wenn dann]-Block müssen geändert werden, um dem Roboterarm mitzuteilen, wo er eine rote Scheibe platzieren soll. Ändern Sie die Parameter der Blöcke [Spin für], die den Basismotor steuern, sodass er sich in jede Richtung um 180 Grad dreht.
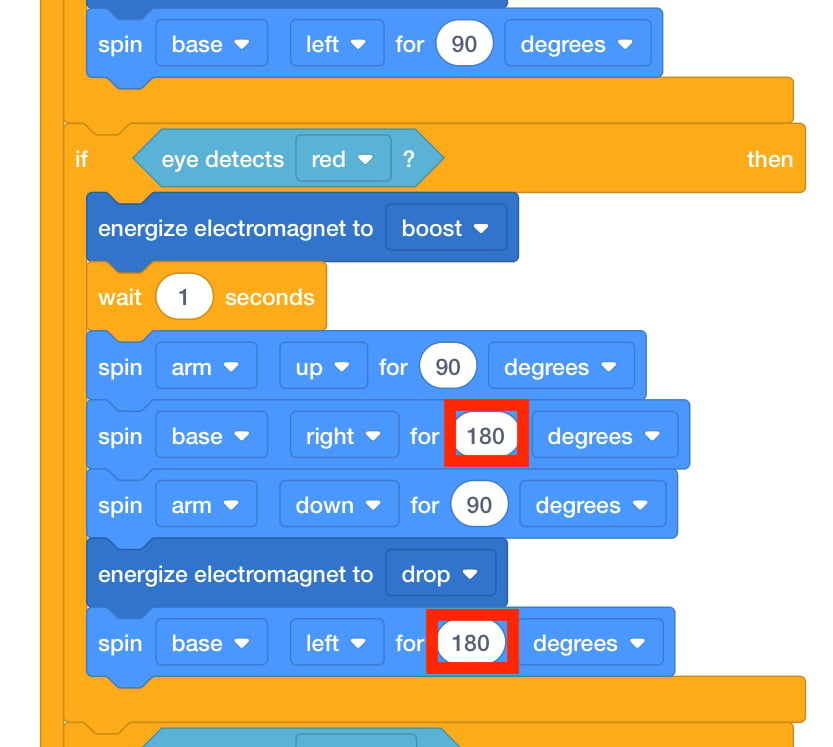
Abgabeort ändern - Nachdem der Roboterarm nun weiß, wohin er alle roten und grünen Scheiben verschieben muss, weisen Sie die Schüler an, den endgültigen Stapel zu bearbeiten. In diesem Stapel bewegt der Roboterarm alle blauen Scheiben an ihren vorgesehenen Platz.
- Lassen Sie die Schüler eine Scheibe auf den Elektromagneten legen, das Projekt starten und sehen, wie sich ihr Roboterarm bewegt. Erinnern Sie sie daran, dass sie das Projekt mit einer an den Elektromagneten angeschlossenen Scheibe beginnen sollten. Überprüfen Sie die Schritte in Starten eines Projekts in VEXcode GO ggf.
- Lassen Sie die Schüler ihre Projekte mehrmals mit allen farbigen Scheiben testen, um sicherzustellen, dass sie wie vorgesehen funktionieren.
- ModerierenModerieren Sie Gespräche über bedingte Anweisungen im Projektablauf, während
die Schüler Parameter ändern und ihre Projekte testen. Verwenden Sie die in der Diashow zu Labor 5
bereitgestellte Lösung, um ihre Projekte im Umlauf zu überprüfen.
Labor 5 Teil 2 Lösung Gehen Sie durch den Raum und überprüfen Sie die Gruppen. Stellen Sie ihnen einige der folgenden Fragen, um eine Diskussion anzuregen.
- Wie würden Sie den Code ändern, wenn alle drei Farben an der gleichen Stelle landen sollen?
- Beschreiben Sie mir, wie sich der Roboterarm bewegt, wenn der Augensensor die Farbe Rot erkennt.
- Was würde passieren, wenn einer meiner [Wenn dann]-Blöcke außerhalb des [Für immer]-Blocks läge? Würde der Roboterarm wie vorgesehen funktionieren? Warum oder warum nicht?
- Was passiert, wenn ich einen orangefarbenen Strahl vor den Augensensor platziere? Würde der Roboterarm es bewegen? Erklären Sie, warum es im Projektablauf nicht vorangeht.
- ErinnernErinnern Sie Gruppen daran, ihre duplizierten [f then]-Stapel innerhalb des
[Forever]-Blocks zu platzieren. Dies ist einer der möglichen Fehler, die bei der Erstellung der Projekte
durch die Studierenden auftreten können.
Erinnern Sie die Schüler daran, dass es in Ordnung ist, es zu versuchen und zu scheitern! Es können mehrere Versionen entstehen, bevor das endgültige Projekt erstellt wird. Akzeptieren Sie Misserfolge, sie sind Teil des Lernprozesses.
- FrageFragen Sie die Schüler, inwiefern die Entscheidungen des Roboterarms den
Entscheidungen ähneln oder sich von ihnen unterscheiden, die sie jeden Tag treffen.
Welche Berufe fallen ihnen ein, bei denen es auf Entscheidungsfindung ankommt?