
Oynamak
Bölüm 1 - Adım Adım
- TalimatÖğrencilere Robot Kolunun bir diski rengine göre hareket ettireceği bir proje oluşturacaklarını söyleyin.
Robot Kolu bir disk algılanana kadar bekleyecek, diskin rengini kontrol edecek ve bu renge göre bir karar verecek. Disk projedeki renkle eşleşirse, Robot Kolu diski kaldıracak ve onu döşemenin başka bir yerine taşıyacak, diski bırakacak ve başlangıç konumuna geri dönecektir. Aşağıdaki videoyu izleyerek Robot Kolun önce diski algılayıp, sonra da rengine göre başka bir yere taşımak için nasıl başarılı bir şekilde diski hareket ettirebileceğini görebilirsiniz.
Video dosyası - ModelÖğrencilerle birlikte projeye [Eğer o zaman] bloğunun ve [Sonsuza Kadar] bloğunun nasıl ekleneceğini modelleyin. Bu örnekte Robot Kolunun yeşil arayacağını açıklayın
-
Öğrencilerin Lab 4 Bölüm 2 projelerini açmalarını ve adını Lab 5 Bölüm 1olarak değiştirmelerini sağlayın.

Projeye İsim Verin - Lab 4'e katılmayan veya projesini bulamayan öğrenciler varsa, Lab 5 Görüntü Slayt Gösterisi'nden Lab 4 Bölüm 2 çözümünü yeniden oluşturmalarını sağlayın.

Lab 4 Bölüm 2 Çözüm - Başlamadan önce öğrencilerin cihazlarını Kod Robot Koluna (2 Eksenli) bağladıklarından ve projelerinin yapılandırmasının Robot Koluna ayarlandığından emin olun. Gerekirse, Robot Kolunu Yapılandırma ve VEX GO Brain'i Bağlamaadımlarını gözden geçirin, ardından öğrencilerin Robot Kollarını bağlamaları ve yapılandırmaları için bu adımları modelleyin.
Not: Robot Kolunuzu cihazınıza ilk bağladığınızda, Beyne yerleştirilmiş Jiroskop kalibre olabilir ve Robot Kolunun bir an için kendi kendine hareket etmesine neden olabilir. Bu beklenen bir davranıştır, kalibrasyon sırasında Robot Koluna dokunmayın.
- [Eğer öyleyse] bloğunu Çalışma Alanına sürükleyin.
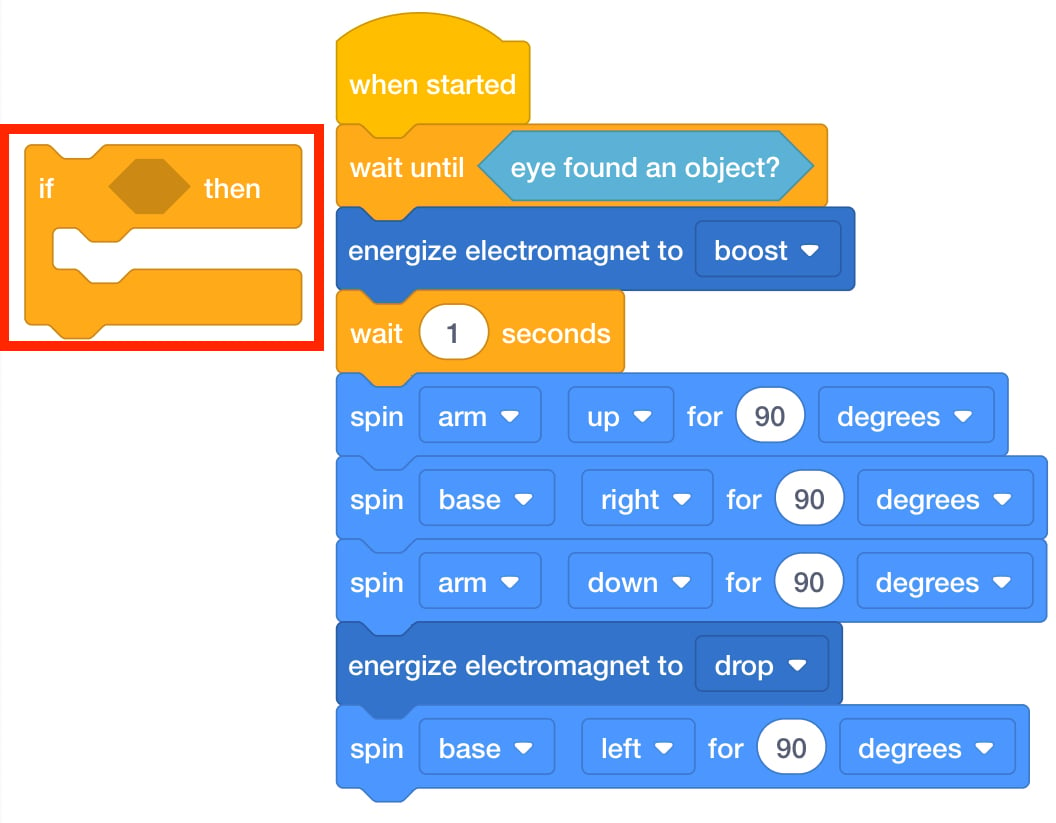
Çalışma alanına [Eğer öyleyse] bloğunu ekleyin - Mevcut blokların etrafına [Eğer öyleyse] bloğu eklenebilir. Öğrencilere blok eklenirken ortaya çıkan gölgeyi gösterin. Bu gölge bloğun yığına nereye ekleneceğini gösterir.
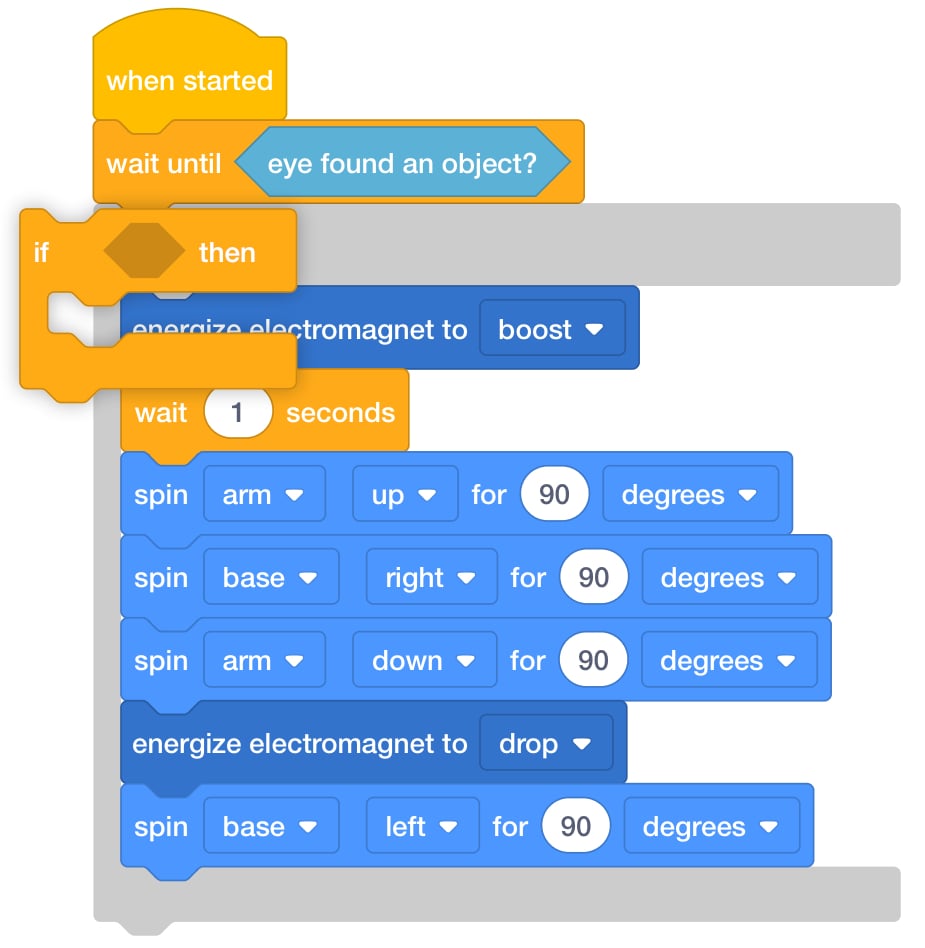
Bir projeye [Eğer o zaman] ekleme - Öğrencilere hangi durumu kontrol etmek istediklerini sorun (Göz sensörü belirli bir renkteki nesneyi algılar). <Color sensing> bloğunu [If then] bloğunun içine sürükleyin.
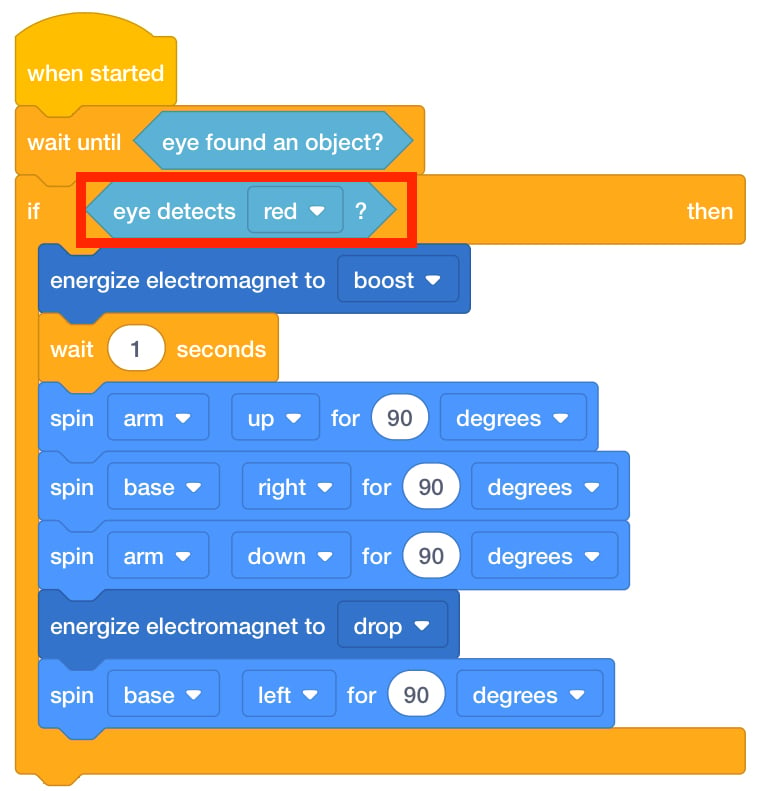
<Color sensing> Blok Eklendi - <Color sensing> bloğunun disklerin renklerini (kırmızı, mavi ve yeşil) algılamak için kullanılabileceğini açıklayın. 'Yeşil' açılır seçeneğini seçin.
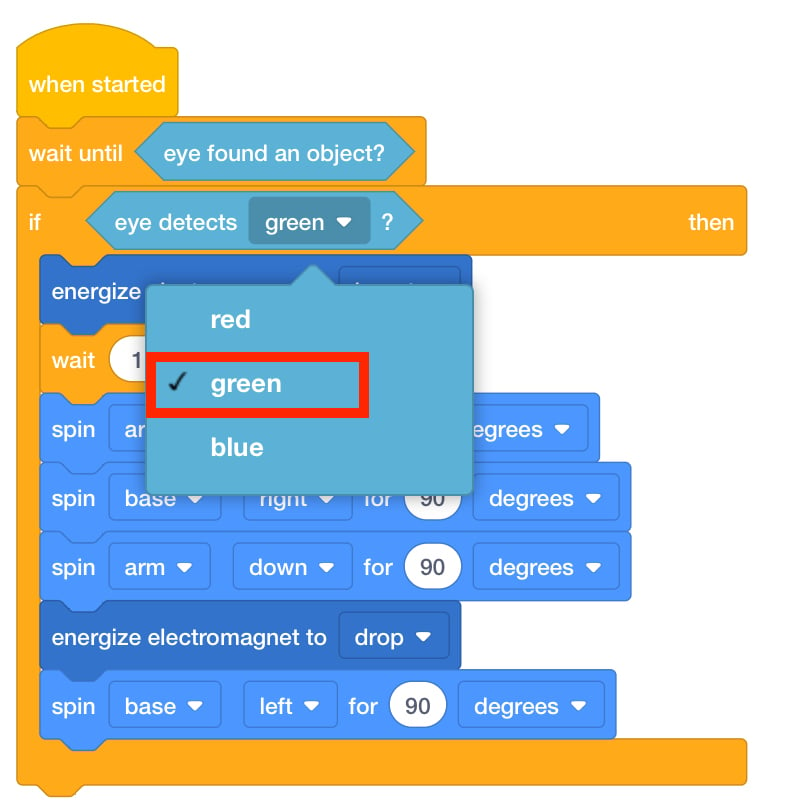
'Yeşil'i seçin - [If then] bloklarının, robotun bir koşulu kontrol etmesini söyleyen koşullu ifadeler olduğunu ve koşul doğruysa bu bloğun çalışacağını açıklayın.

[Eğer öyleyse] Bloğu ile Proje- Öğrencilere bu proje akışında Robot Kolunun <Color sensing> koşulunu kaç kez kontrol edeceğini sorun. Kaç kere kontrol edilmesini istiyorlar? Tekrar tekrar kontrol edebilmek için [Sonsuza Kadar] bloğunu eklemeleri gerekecek. [Sonsuza Kadar] bloğunu Çalışma Alanına sürükleyin ve mevcut blok yığınının etrafına yerleştirin.
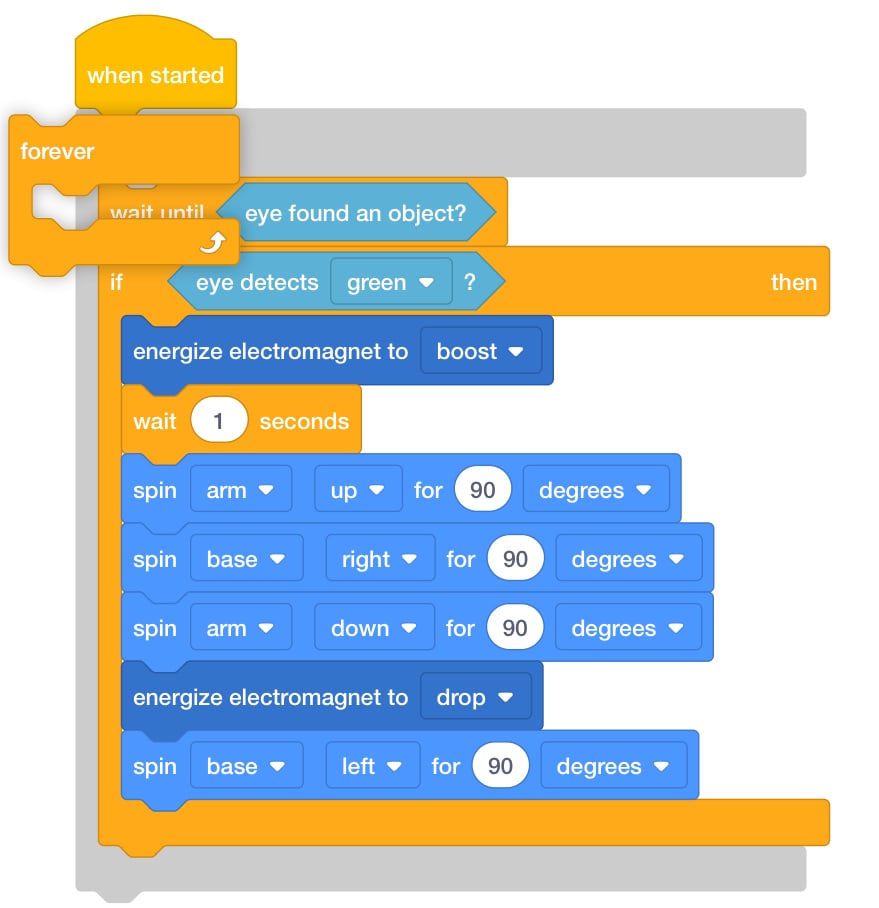
[Sonsuza Kadar] Blok ekle- Öğrencilere projelerinde <Color sensing> bloğunda bulunan üç renkten herhangi birini seçmelerini söyleyin. Aynı renkteki diski Robot Kolundaki Elektromıknatısa takarak Robot Kolunun diski nasıl hareket ettirdiğini görmek için projelerine başlamalılar.
- Not: Lab 5 Bölüm 1 çözümü seçilen renk gruplarına bağlı olarak biraz değişiklik gösterecektir.

Lab 5 Bölüm 1 Çözüm -
- KolaylaştırıcıÖğrenciler projelerini oluşturmaya başlarken konuşmayı kolaylaştırın. Projelerini oluştururken test etmelerini teşvik edin.
- Projeniz planlandığı gibi çalışıyor mu? Neden veya neden olmasın?
- Bu projede [Forever] bloğunun ne işe yaradığını nasıl tanımlarsınız?
- Robot Kolunun önüne farklı renkte bir disk koyarsak ne olacağını düşünüyorsunuz? Robot Kol diski hareket ettirir mi? Neden böyle düşünüyorsun?
- Robot Kolunun iki renkten oluşmasını isteseydiniz, başka hangi blokları eklemeniz gerekirdi?
- HatırlatGrupların kafaları karışırsa soru sormalarını hatırlatın. Yeni blokları kullanırken herhangi bir sorun yaşarlarsa, bu adımları tekrar uygulamalarını sağlayın.
Projelerini tamamlayan grupların, daha fazla yardıma ihtiyaç duyabilecek gruplara yardım etmelerini sağlayın.
- SoruÖğrencilerden sınıf veya ev olaylarını “Eğer...O zaman…” cümleleri şeklinde tanımlamalarını isteyin. Örneğin:
- Eğer Cevabı biliyorsam, o zaman elimi kaldırırım.
- Eğer zil çalarsa, o zaman öğle yemeği vaktidir.
- Eğer tüm ödevlerimi yaparsam, sonra bir saat ekran süresi alırım.
Oyun Arası & Grup Tartışması
Her grup Robot Kolunu renkli bir diski başarıyla alacak şekilde kodladığında , kısa bir konuşma için bir araya gelin.
- Robot Kolunuz ne yaptı?
- Öğrencileri robot davranışları hakkında mümkün olduğunca ayrıntılı konuşmaya teşvik edin. “Kırmızı bir disk gördü” yerine “Robot Kolunun Göz Sensörü kırmızı bir disk algıladı” deyin.
- Robot Kol projelerimizde kararları nasıl aldı? Robot Koluna karar verme talimatını vermek için hangi blokları kullandık?
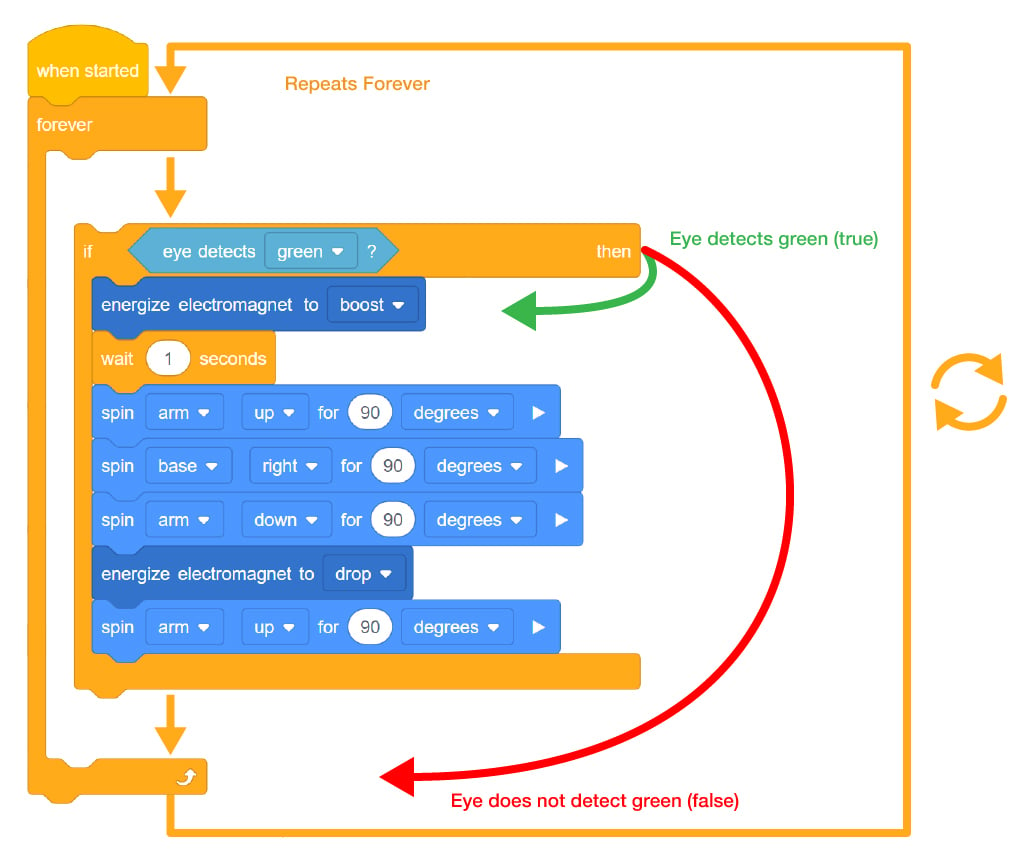
- Robot Kolu bir rengi kaç kez kontrol edecek? Neden? [Sonsuza Kadar] bloğunu kaldırsak ne olur?
- Bu konuşmayı kolaylaştırmak için proje akış görselini kullanın.
Bölüm 2 - Adım Adım
- TalimatÖğrencilere, projelerine Robot kolunun renkli diskleri renklerine bağlı olarak farklı yerlere taşıyacak şekilde bir ekleme yapacaklarını talimat verin. Robot Kolun önce diski algılayıp, sonra da renge göre başka bir yere kaldırmak suretiyle üç diski nasıl başarılı bir şekilde hareket ettirebildiğini görmek için aşağıdaki videoyu izleyin. Animasyonda önce yeşil disk hareket ettiriliyor, ardından kırmızı disk ve son olarak da mavi disk başarıyla teslim ediliyor.
Video dosyası
- ModelÖğrencilerin Robot Koluna, renge göre diskleri farklı yerlere taşıma talimatını vermek için projelerine eklemeleri gereken adımları gösteren model.

Disk Konumları - Her gruptan VEXcode GO'yu cihazlarında başlatmalarını ve Laboratuvar 5 Bölüm 1 projelerini açmalarını isteyin. Yeni proje bu proje üzerine inşa edilecektir.
-
Öğrencilerin projelerini Laboratuvarın başında yeni bir adla kaydetmeleri gerekecektir. Dosya Menüsünden “Farklı Kaydet” veya “Cihazınıza Kaydet” (kullandığınız VEXcode GO sürümüne bağlı olarak) seçeneğini seçmelerini ve projelerini olarak kaydetmelerini sağlayın. Lab 5 Bölüm 2. Aynı cihazda birden fazla grup çalışıyorsa, grup adlarını projeye eklemelerini sağlayın.
 Projeyi
Projeyi Adlandırın - Başlamadan önce, öğrencilerin cihazlarını Kod Robot Kollarına (2 Eksenli) bağladıklarından ve Robot Kolunun yapılandırıldığından emin olun. Gerekirse, Robot Kolunu Yapılandırma ve VEX GO Beynini Bağlama adımlarını gözden geçirin, ardından öğrencilerin Robot Kollarını bağlamaları ve yapılandırmaları için bu adımları modelleyin.
- Şu anda, Robot Kolunda Yeşil Disk tespit edildiğinde ne yapılması gerektiğine dair talimatlar bulunmaktadır. Blokları çoğaltarak, diğer renkler için talimatlar hızlı bir şekilde oluşturulabilir.
- [If then] bloğuna sağ tıklayarak veya uzun basarak blokları nasıl çoğaltacağınızı modelleyin.

İçerik Menüsü - [If then] bloğunu iki kez çoğaltın ve ilk [If then] bloğunun altına ekleyin.
 Blokları
Blokları çoğalt - Öğrencilere, ek disk renklerine yeni eklenen [If then] bloklarının içindeki <Color sensing> bloğu değiştirmeleri gerektiğini açıklayın. İkinci <Color sensing> bloğu ‘kırmızı‘ olarak değiştirin.
 'Kırmızı' olarak
'Kırmızı' olarak değiştir - Robot Koluna bir Kırmızı Diskin nereye yerleştirileceğini söylemek için bu [If then] bloğunun içindeki blokların değiştirilmesi gerekir. Temel Motoru her yönde 180 derece döndürecek şekilde kontrol eden [Spin for] bloklarının parametrelerini değiştirin.
 Bırakma Konumunu
Bırakma Konumunu Değiştir - Artık Robot Kol herhangi bir Kırmızı Diski veya Yeşil Diski nereye taşıyacağını bildiğine göre, öğrencilere son yığını düzenlemelerini söyleyin. Bu yığında Robot Kolu, tüm Mavi Diskleri belirlenen konumlarına taşıyacaktır.
- Öğrencilerin Elektromıknatısa bir Disk yerleştirmelerini ve projeye başlamalarını ve Robot Kollarının nasıl hareket ettiğini görmelerini sağlayın. Projeye Elektromıknatısa bağlı bir Disk ile başlamaları gerektiğini hatırlatın. GerekirseVEXcode GO'da Bir Proje Başlatma adımları inceleyin.
- Öğrencilerin projelerini tüm renkli disklerle birkaç kez test etmelerini ve projenin amaçlandığı gibi çalıştığından emin olmalarını sağlayın.
- Öğrenciler parametreleri değiştirirken ve projelerini test ederken proje akışındaki koşullu ifadeler hakkında konuşmaları kolaylaştırın. Dolaşımdayken projelerini kontrol etmek için Laboratuvar 5 Slayt Gösterisinde verilen çözümü kullanın.

Laboratuvar 5 Bölüm 2 Çözüm Odayı dolaştırırken grupları kontrol ederken, bir tartışma başlatmak için onlara aşağıdaki sorulardan bazılarını sorun.
- Üç rengin de aynı yerde olmasını isteseydik kodu nasıl değiştirirdiniz?
- Göz Sensörü kırmızı rengi tespit ederse Robot Kolunun nasıl hareket edeceğini bana açıklayın.
- [If then] bloklarımdan biri [Forever] bloğunun dışında olsaydı ne olurdu? Robot Kolu amaçlandığı gibi çalışır mı? Neden evet veya neden hayır?
- Göz Sensörünün önüne turuncu bir ışın koyarsam ne olur? Robot Kolu onu hareket ettirir mi? Proje akışı açısından neden hareket etmeyeceğini açıklayın.
- Gruplara, çoğaltılmış [f then] setlerini [Forever] bloğunun içine yerleştirmelerini hatırlat. Bu, öğrenciler projelerini oluştururken oluşabilecek olası hatalardan biridir.
Öğrencilere denemek ve başarısız olmanın sorun olmadığını hatırlatın! Nihai projelerini oluşturmadan önce birden fazla versiyon olabilir. Başarısızlığı kucaklayın, bu öğrenme sürecinin bir parçasıdır.
- Öğrencilere Robot Kol'un verdiği kararların her gün verdikleri kararlara nasıl benzediğini veya farklı olduğunu sorun.
Karar vermeyi kullanan hangi işleri düşünebilirler?