
খেলা
পর্ব ১ - ধাপে ধাপে
- নির্দেশনাশিক্ষার্থীদের নির্দেশ দিন যে তারা এমন একটি প্রকল্প তৈরি করবে যেখানে রোবট আর্ম তার রঙের উপর ভিত্তি করে একটি ডিস্ক সরাবরাহ করবে।
রোবট আর্মটি একটি ডিস্ক সনাক্ত না হওয়া পর্যন্ত অপেক্ষা করবে, ডিস্কের রঙ পরীক্ষা করবে এবং সেই রঙের উপর ভিত্তি করে সিদ্ধান্ত নেবে। যদি ডিস্কটি প্রকল্পের রঙের সাথে মিলে যায়, তাহলে রোবট আর্মটি ডিস্কটি তুলে টাইলের অন্য অংশে নিয়ে যাবে, ডিস্কটি ফেলে দেবে এবং শুরুর স্থানে ফিরে যাবে। রোবট আর্ম কীভাবে ডিস্কটি সফলভাবে সরাতে পারে তা দেখতে নীচের ভিডিওটি দেখুন, প্রথমে ডিস্কটি সেন্স করে এবং তারপর রঙের উপর ভিত্তি করে অন্য স্থানে স্থানান্তর করার জন্য এটি তুলে নেয়।
ভিডিও ফাইল - মডেলশিক্ষার্থীদের সাথে প্রকল্পে [যদি তারপর] ব্লক এবং [চিরকালের] ব্লক কীভাবে যোগ করবেন তার মডেল তৈরি করুন। ব্যাখ্যা করুন যে এই উদাহরণে, রোবট আর্ম সবুজ রঙের সন্ধান করবে
-
শিক্ষার্থীদের তাদের ল্যাব 4 পার্ট 2 প্রকল্পটি খুলতে এবং এর নামকরণ করতে বলুন ল্যাব 5 পার্ট 1।

প্রকল্পের নাম - যদি এমন কোনও শিক্ষার্থী থাকে যারা ল্যাব ৪-এ উপস্থিত ছিল না অথবা তাদের প্রকল্প খুঁজে পাচ্ছে না, তাহলে তাদের ল্যাব ৫ ইমেজ স্লাইডশো থেকে ল্যাব ৪ পার্ট ২ সমাধানটি পুনরায় তৈরি করতে বলুন।

ল্যাব ৪ পার্ট ২ সমাধান - শুরু করার আগে, নিশ্চিত করুন যে শিক্ষার্থীরা তাদের ডিভাইসটি তাদের কোড রোবট আর্ম (2-অক্ষ) এর সাথে সংযুক্ত করেছে এবং তাদের প্রকল্পের কনফিগারেশনটি রোবট আর্ম-এ সেট করা আছে। প্রয়োজনে, একটি রোবট আর্ম কনফিগার করুন এবং একটি VEX GO ব্রেনসংযুক্ত করুন এর ধাপগুলি পর্যালোচনা করুন, তারপর শিক্ষার্থীদের তাদের রোবট আর্ম সংযোগ এবং কনফিগার করার জন্য এই ধাপগুলি মডেল করুন।
দ্রষ্টব্য: যখন আপনি প্রথমবার আপনার রোবট আর্মকে আপনার ডিভাইসের সাথে সংযুক্ত করেন, তখন মস্তিষ্কে তৈরি গাইরো ক্যালিব্রেট হতে পারে, যার ফলে রোবট আর্মটি কিছুক্ষণের জন্য নিজে থেকেই নড়াচড়া করতে পারে। এটি একটি প্রত্যাশিত আচরণ, ক্যালিব্রেট করার সময় রোবট আর্ম স্পর্শ করবেন না।
- [যদি তাহলে] ব্লকটি ওয়ার্কস্পেসে টেনে আনুন।

কর্মক্ষেত্রে একটি [যদি থাকে] ব্লক যোগ করুন - বিদ্যমান ব্লকগুলির চারপাশে একটি [যদি থাকে] ব্লক যোগ করা যেতে পারে। ব্লকটি যোগ করার সময় যে ছায়াটি দেখায় তা শিক্ষার্থীদের দেখাও। এই ছায়াটি নির্দেশ করে যে ব্লকটি স্ট্যাকের কোথায় যোগ করা হবে।

একটি প্রকল্পে [যদি থাকে] যোগ করা - শিক্ষার্থীদের জিজ্ঞাসা করুন তারা কোন অবস্থা পরীক্ষা করতে চান (চোখের সেন্সর একটি নির্দিষ্ট রঙের বস্তু সনাক্ত করে)। <Color sensing> ব্লকটিকে [যদি থাকে] ব্লকে টেনে আনুন।
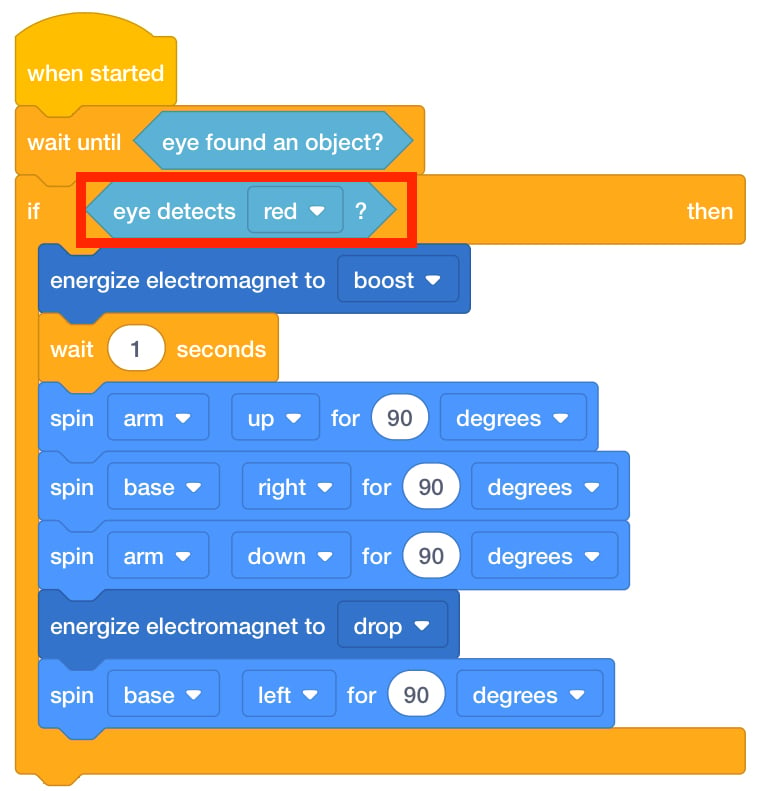
<Color sensing> ব্লক যোগ করা হয়েছে - ব্যাখ্যা করো যে <Color sensing> ব্লকটি ডিস্কের রঙ সনাক্ত করতে ব্যবহার করা যেতে পারে: লাল, নীল এবং সবুজ। 'সবুজ' ড্রপ-ডাউন বিকল্পটি নির্বাচন করুন।
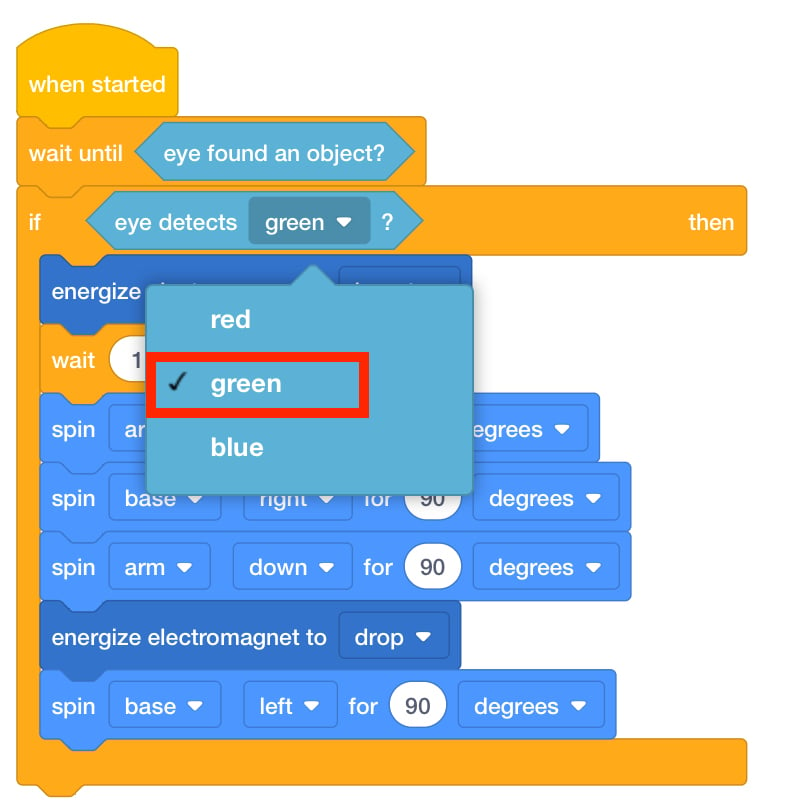
'সবুজ' নির্বাচন করুন - ব্যাখ্যা করো যে [যদি তারপর] ব্লকগুলি হল শর্তসাপেক্ষ বিবৃতি যা রোবটকে একটি শর্ত পরীক্ষা করার নির্দেশ দেয় এবং যদি শর্তটি সত্য হয়, তাহলে এই ব্লকটি চলবে।
[যদি তাহলে] ব্লক সহ প্রকল্প- এই প্রকল্পের প্রবাহে রোবট আর্ম কতবার <Color sensing> অবস্থা পরীক্ষা করবে তা শিক্ষার্থীদের জিজ্ঞাসা করুন। তারা কি এটা কতবার পরীক্ষা করতে চায়? বারবার পরীক্ষা করার জন্য, তাদের একটি [Forever] ব্লক যোগ করতে হবে। ওয়ার্কস্পেসে একটি [চিরকালের] ব্লক টেনে আনুন এবং বিদ্যমান ব্লকের স্ট্যাকের চারপাশে রাখুন।

[চিরকালের জন্য] ব্লক যোগ করুন- শিক্ষার্থীদের তাদের প্রকল্পের <Color sensing> ব্লকে উপলব্ধ তিনটি রঙের যেকোনো একটি নির্বাচন করতে নির্দেশ দিন। তাদের রোবট বাহুতে ইলেক্ট্রোম্যাগনেটের সাথে একই রঙের ডিস্কটি সংযুক্ত করা উচিত এবং রোবট বাহু কীভাবে ডিস্কটি নাড়াচাড়া করে তা দেখার জন্য তাদের প্রকল্প শুরু করা উচিত।
- দ্রষ্টব্য: ল্যাব ৫ পার্ট ১ সমাধানটি বেছে নেওয়া রঙের গ্রুপের উপর নির্ভর করে সামান্য পরিবর্তিত হবে।

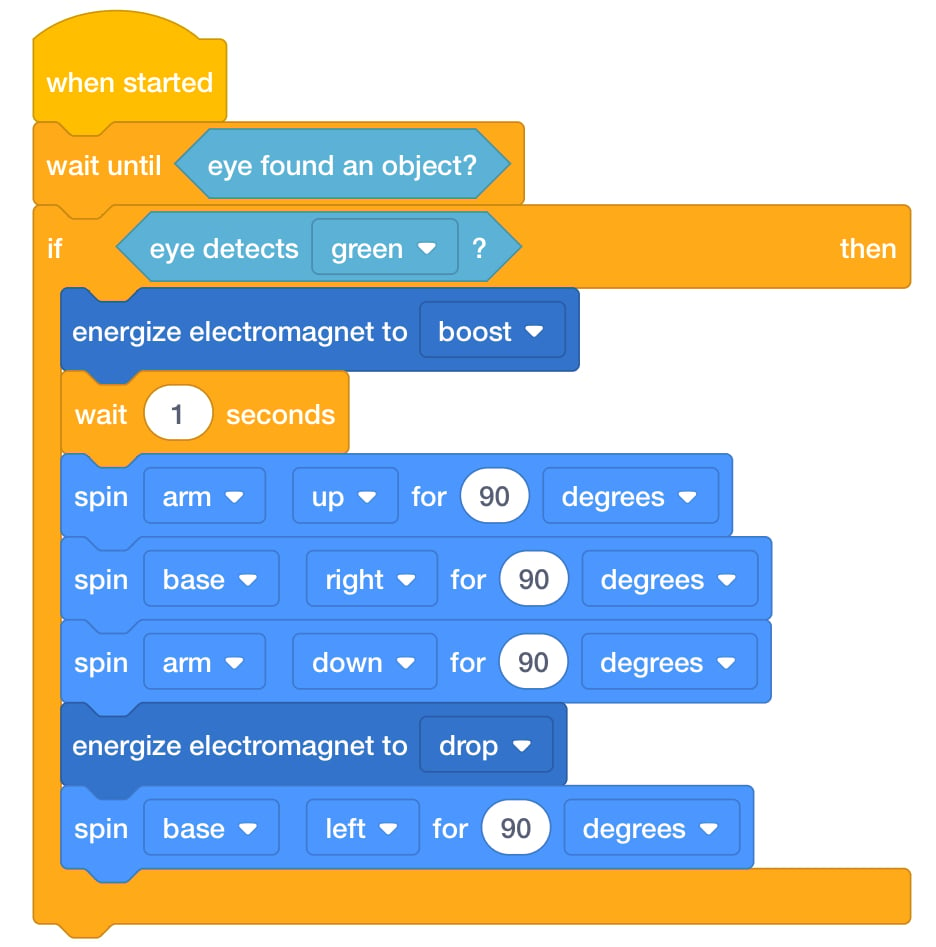
ল্যাব ৫ পার্ট ১ সমাধান -
- সহায়তা করুনশিক্ষার্থীরা যখন তাদের প্রকল্প তৈরি শুরু করে তখন কথোপকথনকে সহায়তা করুন। তাদের প্রকল্প তৈরির সময় সেগুলো পরীক্ষা করার জন্য উৎসাহিত করুন।
- আপনার প্রকল্প কি আপনার পরিকল্পনা অনুযায়ী কাজ করছে? কেন অথবা কেন নয়?
- এই প্রকল্পে [Forever] ব্লক কী করে তা আপনি কীভাবে বর্ণনা করবেন?
- রোবট আর্মের সামনে যদি আমরা একটি ভিন্ন রঙের ডিস্ক রাখি তাহলে কী হবে বলে তুমি মনে করো? রোবট আর্ম কি ডিস্কটি সরিয়ে ফেলবে? তুমি কেন এমন মনে করো?
- যদি তুমি চাও যে রোবট আর্ম দুটি রঙ সাজাতে চাও, তাহলে আর কোন ব্লক যোগ করতে হবে?
- মনে করিয়ে দিনদলগুলিকে মনে করিয়ে দিন যে তারা বিভ্রান্ত হলে প্রশ্ন জিজ্ঞাসা করতে। নতুন ব্লক ব্যবহারে যদি তাদের কোন সমস্যা হয়, তাহলে তাদের আবার এই ধাপগুলি অনুসরণ করতে বলুন।
যেসব গোষ্ঠী তাদের প্রকল্প শেষ করেছে, তাদের সেইসব গোষ্ঠীকে সাহায্য করতে বলুন যাদের আরও সহায়তার প্রয়োজন হতে পারে।
- জিজ্ঞাসাশিক্ষার্থীদের শ্রেণীকক্ষ বা বাড়ির ঘটনাগুলিকে "যদি...তাহলে…" বাক্য হিসেবে বর্ণনা করতে বলুন। উদাহরণস্বরূপ:
- যদি আমি উত্তর জানি, তাহলে আমি হাত তুলব।
- যদি ঘণ্টা বাজে, তাহলে বাজে, দুপুরের খাবারের সময়।
- যদি আমার সমস্ত হোমওয়ার্ক সেরে ফেলি, তারপর আমি এক ঘন্টা স্ক্রিনটাইম পাই।
খেলার মাঝামাঝি বিরতি & গ্রুপ আলোচনা
প্রতিটি দল তাদের রোবট আর্মকে একটি রঙিন ডিস্ক সফলভাবে সংগ্রহ করার জন্য কোড করার সাথে, সংক্ষিপ্ত কথোপকথনের জন্য একত্রিত হও।
- তোমার রোবট আর্ম কী করেছে?
- শিক্ষার্থীদের রোবটের আচরণ সম্পর্কে যতটা সম্ভব স্পষ্টভাবে কথা বলতে উৎসাহিত করুন। "এটি একটি লাল ডিস্ক দেখেছিল" এর পরিবর্তে, বলুন "রোবট আর্ম'স আই সেন্সর একটি লাল ডিস্ক সনাক্ত করেছে"।
- আমাদের প্রকল্পগুলিতে রোবট আর্ম কীভাবে সিদ্ধান্ত নিত? রোবট আর্মকে সিদ্ধান্ত নেওয়ার নির্দেশ দেওয়ার জন্য আমরা কোন ব্লক ব্যবহার করেছি?
- রোবট আর্ম কতবার রঙের জন্য পরীক্ষা করবে? কেন? যদি আমরা [Forever] ব্লকটি সরিয়ে ফেলি?
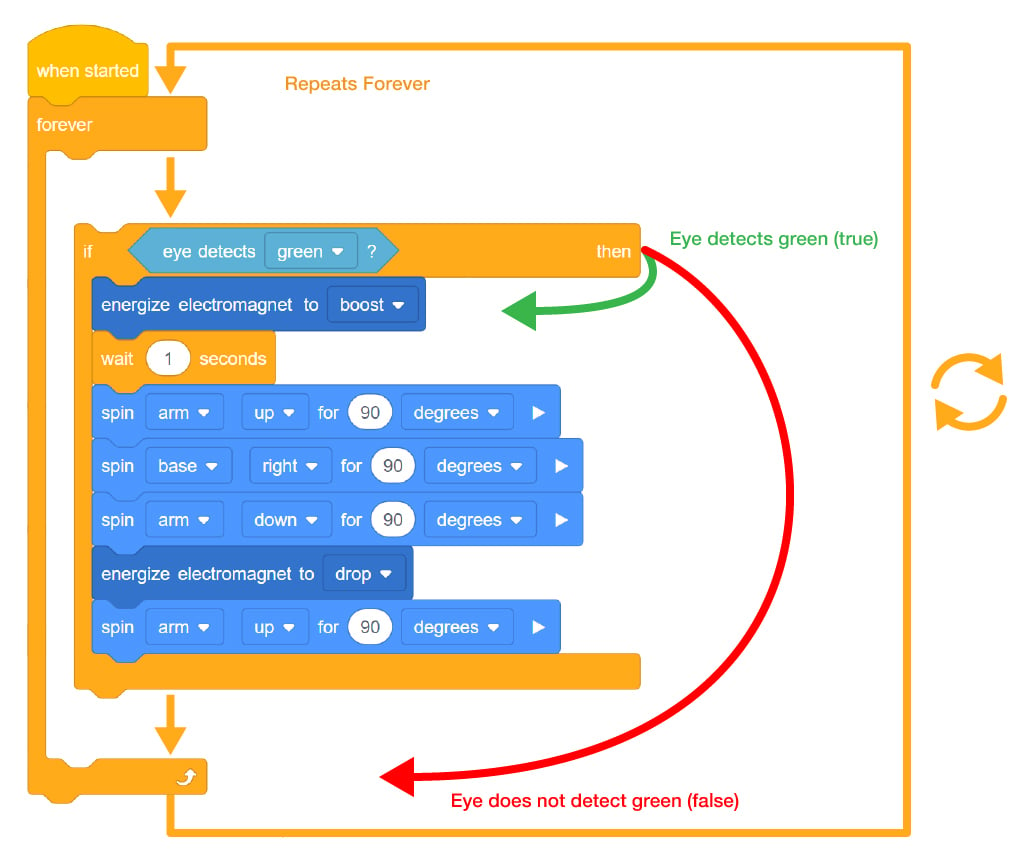
- এই কথোপকথনটি সহজতর করতে প্রকল্প প্রবাহ চিত্রটি ব্যবহার করুন।
পার্ট ২ - ধাপে ধাপে
- নির্দেশনাশিক্ষার্থীদের নির্দেশ দিন যে তারা তাদের প্রকল্পে এমন কিছু যোগ করতে যাচ্ছে যাতে রোবট বাহু রঙের উপর নির্ভর করে রঙিন ডিস্কগুলিকে বিভিন্ন স্থানে স্থানান্তর করতে পারে। রোবট আর্ম কীভাবে তিনটি ডিস্ক সফলভাবে সরাতে পারে তা দেখতে নিচের ভিডিওটি দেখুন, প্রথমে ডিস্কটি সেন্স করে এবং তারপর রঙের উপর ভিত্তি করে অন্য স্থানে নিয়ে যাওয়ার জন্য এটি তুলে নেয়। অ্যানিমেশনে, প্রথমে একটি সবুজ ডিস্ক সরানো হয়, তারপর একটি লাল ডিস্ক, এবং সবশেষে, একটি নীল ডিস্ক সফলভাবে বিতরণ করা হয়।
ভিডিও ফাইল
- শিক্ষার্থীদের জন্য মডেল মডেল রোবট আর্মকে রঙের উপর ভিত্তি করে বিভিন্ন স্থানে ডিস্ক সরানোর নির্দেশ দেওয়ার জন্য তাদের প্রকল্পে যোগ করার পদক্ষেপগুলি ।

ডিস্কের অবস্থান - প্রতিটি গ্রুপকে তাদের ডিভাইসে VEXcode GO চালু করতে হবে এবং তাদের ল্যাব 5 পার্ট 1 প্রকল্প খুলতে হবে । নতুন প্রকল্পটি এই প্রকল্পের উপর ভিত্তি করে গড়ে উঠবে ।
-
ল্যাবের শুরুতে শিক্ষার্থীদের একটি নতুন নাম দিয়ে তাদের প্রকল্প সংরক্ষণ করতে হবে । তাদের ফাইল মেনু থেকে "সেভ এজ" বা "সেভ টু ইউর ডিভাইস" (আপনি কোন VEXcode GO সংস্করণ ব্যবহার করছেন তার উপর নির্ভর করে) নির্বাচন করতে বলুন এবং তাদের প্রোজেক্ট Lab 5 Part 2হিসাবে সংরক্ষণ করুন। যদি একাধিক গোষ্ঠী একই ডিভাইসে কাজ করে তবে তাদের প্রকল্পে তাদের গ্রুপের নাম যুক্ত করুন ।
 প্রকল্পের
প্রকল্পের নাম - শুরু করার আগে, নিশ্চিত করুন যে শিক্ষার্থীরা তাদের ডিভাইসটি তাদের কোড রোবট আর্ম (2-অক্ষ) এর সাথে সংযুক্ত করেছে এবং রোবট আর্মটি কনফিগার করা আছে । যদি প্রয়োজন হয়, একটি রোবট আর্ম কনফিগার করতে এবং একটি vex GO Brain সংযুক্ত করতে পদক্ষেপগুলি পর্যালোচনা করুন, তারপরে শিক্ষার্থীদের তাদের রোবট আর্ম সংযোগ এবং কনফিগার করার জন্য এই পদক্ষেপগুলি মডেল করুন ।
- এই মুহূর্তে, একটি গ্রিন ডিস্ক সনাক্ত হলে রোবট আর্মের কী করা উচিত তার নির্দেশাবলী রয়েছে । ব্লকগুলির সদৃশ করে, অন্যান্য রঙের জন্য নির্দেশাবলী দ্রুত তৈরি করা যেতে পারে ।
- [যদি তাহলে] ব্লকে ডান-ক্লিক করে বা দীর্ঘক্ষণ চেপে ব্লকগুলি কীভাবে ডুপ্লিকেট করবেন তা মডেল করুন।

কনটেক্সট মেনু - [যদি তারপর] ব্লকটি দুবার ডুপ্লিকেট করুন এবং প্রথম [যদি তারপর] ব্লকের নিচে তাদের যোগ করুন ।
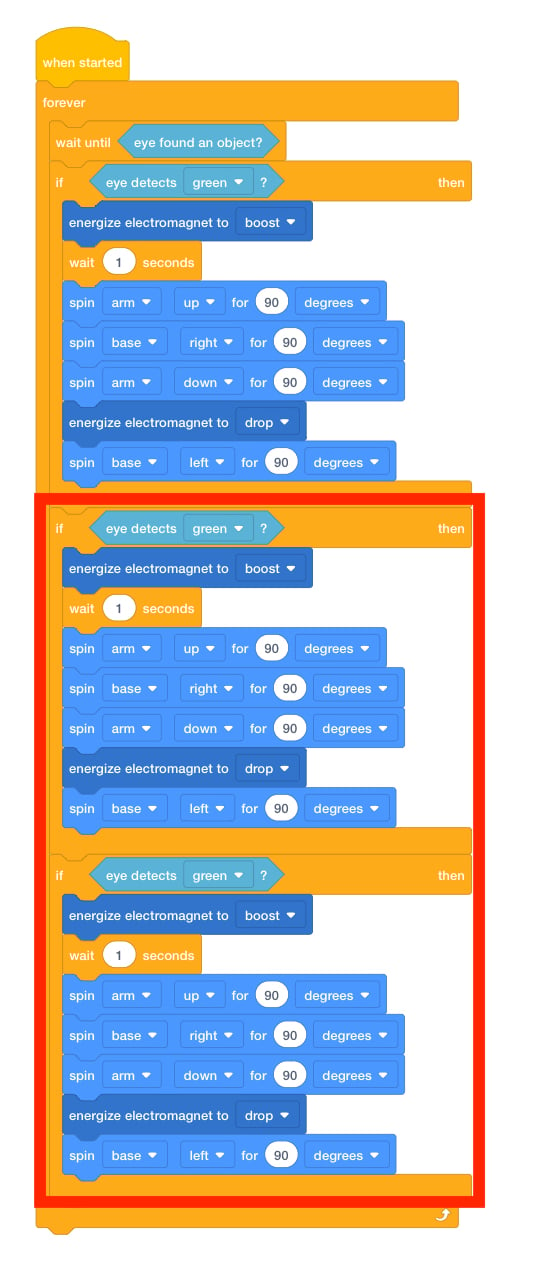
সদৃশ ব্লক - শিক্ষার্থীদের বুঝিয়ে বলুন যে তাদের নতুন যোগ করা [যদি তারপর] <Color sensing> ব্লকের অভ্যন্তরে ব্লকটি অতিরিক্ত ডিস্ক রঙে পরিবর্তন করতে হবে । দ্বিতীয় <Color sensing> ব্লকটিকে ‘লাল‘ -এ পরিবর্তন করুন ।
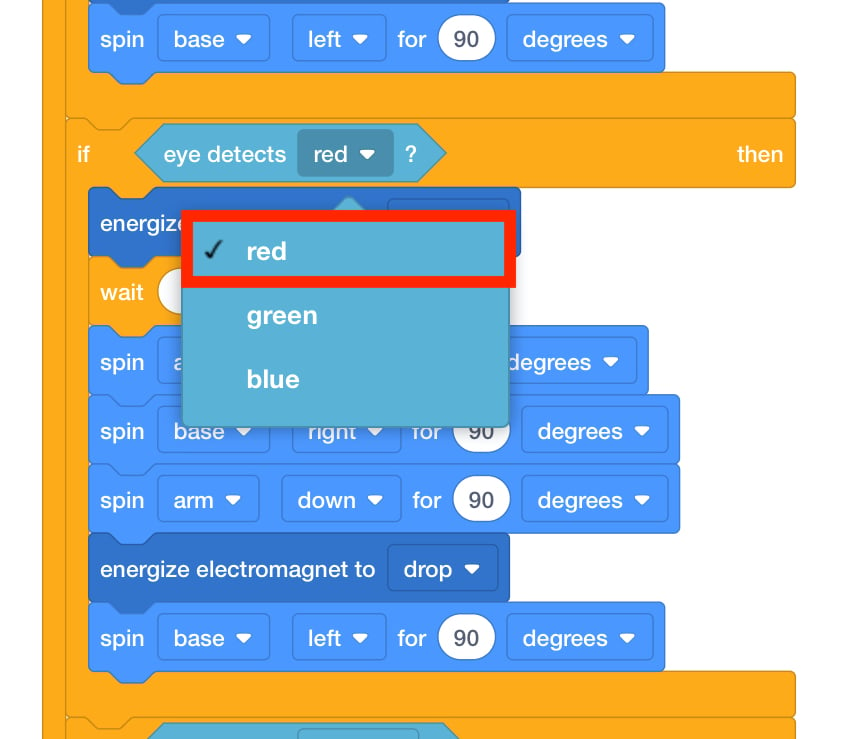 'লাল' -এ
'লাল' -এ পরিবর্তন করুন - এই [যদি তারপর] ব্লকের ভিতরে থাকা ব্লকগুলি রোবট আর্মকে কোথায় একটি রেড ডিস্ক স্থাপন করতে হবে তা বলার জন্য পরিবর্তন করা দরকার । বেস মোটর নিয়ন্ত্রণকারী [স্পিন ফর] ব্লকগুলির প্যারামিটারগুলি প্রতিটি দিকে ১৮০ ডিগ্রি ঘোরানোর জন্য পরিবর্তন করুন।
 ড্রপ-অফ লোকেশন
ড্রপ-অফ লোকেশন পরিবর্তন করুন - এখন যেহেতু রোবট আর্ম কোনও রেড ডিস্ক বা গ্রিন ডিস্ক কোথায় সরাতে হবে তা জানে, তাই শিক্ষার্থীদের চূড়ান্ত স্ট্যাকটি সম্পাদনা করার নির্দেশ দিন । এই স্ট্যাকে, রোবট আর্ম যেকোনো ব্লু ডিস্ককে তাদের নির্ধারিত স্থানে নিয়ে যাবে ।
- শিক্ষার্থীদের ইলেক্ট্রোম্যাগনেটে একটি ডিস্ক রাখুন এবং প্রকল্পটি শুরু করুন এবং দেখুন তাদের রোবট আর্ম কীভাবে চলে । তাদের মনে করিয়ে দিন যে তাদের ইলেক্ট্রোম্যাগনেটের সাথে সংযুক্ত একটি ডিস্ক দিয়ে প্রকল্পটি শুরু করা উচিত । প্রয়োজনে VEXcode GO এ একটি প্রকল্প শুরু করার ধাপগুলিপর্যালোচনা করুন।
- শিক্ষার্থীদের তাদের প্রকল্পগুলি সমস্ত রঙিন ডিস্ক দিয়ে একাধিকবার পরীক্ষা করতে বলুন যাতে নিশ্চিত করা যায় যে এটি উদ্দেশ্য অনুসারে কাজ করছে।
- শিক্ষার্থীরা প্যারামিটার পরিবর্তন করে এবং তাদের প্রকল্পগুলি পরীক্ষা করার কারণে প্রকল্প প্রবাহে শর্তসাপেক্ষ বিবৃতি সম্পর্কে কথোপকথনগুলি সহজতর করুন । আপনি সঞ্চালিত হওয়ার সাথে সাথে তাদের প্রকল্পগুলি পরীক্ষা করতে ল্যাব 5 স্লাইডশোতে প্রদত্ত সমাধানটি ব্যবহার করুন ।

ল্যাব 5 পার্ট 2 সলিউশন আপনি যখন ঘরটি গ্রুপগুলিতে পরীক্ষা করছেন, তখন তাদের একটি আলোচনা শুরু করার জন্য নিম্নলিখিত প্রশ্নগুলির মধ্যে কয়েকটি জিজ্ঞাসা করুন ।
- আমরা যদি তিনটি রঙই একই স্থানে শেষ করতে চাই তাহলে আপনি কীভাবে কোডটি পরিবর্তন করবেন?
- আই সেন্সর লাল রঙ সনাক্ত করলে রোবট আর্মটি কীভাবে নড়াচড়া করবে তা আমাকে বর্ণনা করুন ।
- আমার [যদি তারপর] ব্লকগুলির মধ্যে একটি [চিরকালের] ব্লকের বাইরে থাকলে কী হবে? রোবট আর্ম কি উদ্দেশ্য অনুযায়ী কাজ করবে? কেন বা কেন নয়?
- আমি যদি চোখের সেন্সরের সামনে একটি কমলা মরীচি রাখি তবে কী হবে? রোবট আর্ম কি এটি সরাতে পারবে? ব্যাখ্যা করুন কেন এটি প্রকল্পের প্রবাহের পরিপ্রেক্ষিতে নড়াচড়া করবে না ।
- মনেকরিয়ে দিন যে দলগুলি তাদের সদৃশ [f then] স্ট্যাকগুলি [Forever] ব্লকের ভিতরে রাখবে । শিক্ষার্থীরা তাদের প্রকল্প তৈরি করার সময় ঘটতে পারে এমন সম্ভাব্য ত্রুটিগুলির মধ্যে এটি একটি ।
শিক্ষার্থীদের মনে করিয়ে দিন যে চেষ্টা করা এবং ব্যর্থ হওয়া ঠিক আছে! তাদের চূড়ান্ত প্রকল্প তৈরি করার আগে একাধিক সংস্করণ থাকতে পারে । ব্যর্থতা আলিঙ্গন করুন, এটি শেখার প্রক্রিয়ার একটি অংশ ।
- শিক্ষার্থীদের জিজ্ঞাসা করুন যে রোবট আর্মের সিদ্ধান্তগুলি তারা প্রতিদিন যে সিদ্ধান্ত নেয় তার থেকে কীভাবে একই বা ভিন্ন ।
সিদ্ধান্ত নেওয়ার ক্ষেত্রে তারা কোন চাকরিগুলি ব্যবহার করতে পারে বলে মনে করেন?