
การหันหน้าไปในทิศทางที่ถูกต้องนั้นสำคัญ โดยเฉพาะเมื่อหุ่นยนต์ของคุณมีงานที่ต้องทำ! ในบทเรียนนี้ คุณจะได้เรียนรู้วิธีใช้บล็อก Turn to heading เพื่อควบคุมว่า VEX AIM Coding Robot ของคุณหันหน้าไปทางใด จากนั้นคุณจะฝึกฝนทักษะนี้โดยการเขียนโค้ดให้หุ่นยนต์ของคุณส่งถังผ่านเส้นทางสลาลอมของคุณได้!
ชมวิดีโอด้านล่างเพื่อเรียนรู้เกี่ยวกับ:
- ความแตกต่างระหว่างการเคลื่อนหุ่นยนต์เป็นมุมกับการเลี้ยวตามทิศทาง
- วิธีการกำหนดหัวข้อที่คุณต้องการ
- การเขียนโค้ดให้หุ่นยนต์หมุนตามทิศทาง
ตอนนี้คุณได้ชมวิดีโอแล้ว ให้บันทึกความคิดของคุณลงในสมุดบันทึก ตอบคำถามเหล่านี้เพื่อเป็นแนวทางในการคิดของคุณและช่วยคุณเตรียมความพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- คุณสังเกตอะไรเกี่ยวกับการเคลื่อนไหวของหุ่นยนต์ที่นี่ เมื่อเทียบกับวิธีอื่นที่คุณเคลื่อนไหวหุ่นยนต์? ระบุข้อสังเกตอย่างน้อยสองข้อ
- คุณเห็นอะไรในวิดีโอที่สนับสนุนคำพูดของคุณบ้าง?
- คุณมีคำถามอะไรเกี่ยวกับการเขียนโค้ดให้หุ่นยนต์หมุนและเคลื่อนที่บ้าง?
- คุณคิดว่าความใส่ใจต่อความแม่นยำส่งผลต่อความสามารถในการนำทางขณะขนส่งวัตถุอย่างไร
ตอนนี้คุณได้ชมวิดีโอแล้ว ให้บันทึกความคิดของคุณลงในสมุดบันทึก ตอบคำถามเหล่านี้เพื่อเป็นแนวทางในการคิดของคุณและช่วยคุณเตรียมความพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- คุณสังเกตอะไรเกี่ยวกับการเคลื่อนไหวของหุ่นยนต์ที่นี่ เมื่อเทียบกับวิธีอื่นที่คุณเคลื่อนไหวหุ่นยนต์? ระบุข้อสังเกตอย่างน้อยสองข้อ
- คุณเห็นอะไรในวิดีโอที่สนับสนุนคำพูดของคุณบ้าง?
- คุณมีคำถามอะไรเกี่ยวกับการเขียนโค้ดให้หุ่นยนต์หมุนและเคลื่อนที่บ้าง?
- คุณคิดว่าความใส่ใจต่อความแม่นยำส่งผลต่อความสามารถในการนำทางขณะขนส่งวัตถุอย่างไร
หลังจากที่นักเรียนชมวิดีโอแล้ว และก่อนที่จะฝึกซ้อม มารวมตัวกันเพื่ออภิปรายทั้งชั้นเรียน ใช้คำตอบของนักเรียนต่อคำถามที่กำหนดให้เพื่อเป็นพื้นฐานในการอภิปราย
จำไว้ว่านักเรียนใช้การเคลื่อนไหวที่คล้ายกันในการเขียนโปรแกรมแบบปุ่ม โดยที่หุ่นยนต์จะเคลื่อนที่โดยหันไปข้างหน้าเสมอ พวกเขาต้องสร้างขั้นตอนแยกต่างหากสำหรับการเปลี่ยนจาก เป็น ในการวางแผนเส้นทางของพวกเขาไว้ก่อนหน้านี้ แนะนำให้นักเรียนเปรียบเทียบและแสดงความแตกต่างระหว่างการเขียนโค้ดหุ่นยนต์ในลักษณะนี้กับประสบการณ์ก่อนหน้าของพวกเขา เน้นย้ำถึงวิธีการใช้บล็อกจาก เทิร์นเป็น เทิร์น ช่วยให้ควบคุมเทิร์นที่ตนเองกำลังเลี้ยวได้ดีขึ้น และพูดคุยว่าเหตุใดจึงมีประโยชน์
การฝึกปฏิบัติแบบมีคำแนะนำ
ตอนนี้คุณได้ดูและอภิปรายวิดีโอแล้ว ถึงเวลาฝึกฝนแล้ว!
ขั้นตอนที่ 1: ตั้งค่าสนามเพื่อสร้างหลักสูตรสลาลอม คุณสามารถใช้หลักสูตรเดียวกันกับที่คุณใช้ในหน่วยก่อนหน้าหรือหลักสูตรที่แสดงที่นี่ได้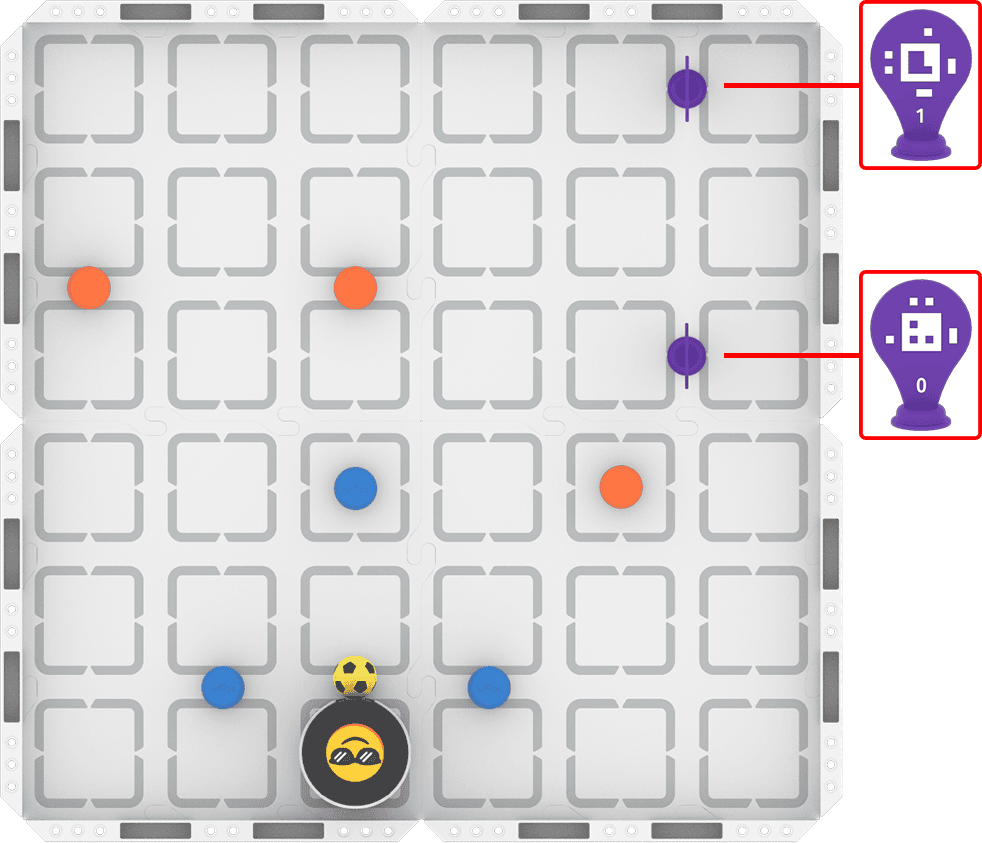
ขั้นตอน 2: ใช้โหมดขับเคลื่อนเพื่อสร้างแบบจำลองการเคลื่อนไหวที่หุ่นยนต์ของคุณต้องดำเนินการให้สำเร็จ
- งานของคุณคือขับหุ่นยนต์เพื่อขนส่งลูกบอลกีฬาผ่านประตูแต่ละบาน โดยสิ้นสุดที่ประตู AprilTag บันทึกการขับขี่ของคุณ จากนั้นวางแผนว่าจะเข้ารหัสการเคลื่อนไหวนั้นอย่างไร
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับ: ใช้โครงการจากหน่วยก่อนหน้าเป็นพื้นฐานสำหรับงานฝึกหัดนี้ เปลี่ยนบล็อกในโครงการตามต้องการเพื่อนำทางหุ่นยนต์ของคุณในการส่งลูกบอลกีฬาได้สำเร็จ
ขั้นตอน 3: เขียนโค้ดให้หุ่นยนต์ทำงานให้สำเร็จ
- งานของคุณคือใช้แผนเส้นทางจากขั้นตอนที่ 2 เพื่อเขียนโค้ดให้หุ่นยนต์ขนส่งลูกบอลกีฬาผ่านประตูแต่ละบานและส่งไปยังเส้นชัย
- ใช้การ์ดงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางการปฏิบัติของคุณ
ขั้นตอน 4: ใช้กระบวนการ Predict-Drive-Measure-Code เพื่อทำซ้ำและปรับปรุงโครงการของคุณในการนำทางสลาลอมด้วยลูกบอลกีฬา:
- ทำนาย
- เลือกหัวข้อแรกที่คุณต้องการปรับเปลี่ยน ทำการทำนายเป็นกลุ่มเกี่ยวกับวิธีการปรับปรุงหัวเรื่องโดยใช้ประโยคนี้ และบันทึกไว้ในวารสารของคุณ:
- เราคิดว่าทิศทางควรอยู่ที่ประมาณ ____________ องศา
- เลือกหัวข้อแรกที่คุณต้องการปรับเปลี่ยน ทำการทำนายเป็นกลุ่มเกี่ยวกับวิธีการปรับปรุงหัวเรื่องโดยใช้ประโยคนี้ และบันทึกไว้ในวารสารของคุณ:
- ไดรฟ์
- ทดสอบการทำนายของคุณโดยขับเคลื่อนหุ่นยนต์ของคุณไปตามทิศทางที่คุณคาดการณ์ไว้ หากรู้สึกว่าไม่ถูกต้อง คุณจะเปลี่ยนแปลงอะไรเพื่อให้แม่นยำยิ่งขึ้นได้บ้าง? ถ้าไม่อย่างนั้นแล้วรู้สึกยังไงถึงจะดี?
- วัด
- วางหุ่นยนต์วัดมุมของคุณไว้ใต้หุ่นยนต์ จริงๆ แล้วคุณขับหุ่นยนต์ที่หัวข้อไหน?
- รหัส
- ใช้หัวข้อใหม่ของคุณในโครงการการเขียนโค้ดของคุณ! ปรับแต่งโครงการของคุณแล้วรันเพื่อทดสอบ หัวข้อที่ปรับปรุงแล้วจะช่วยให้หุ่นยนต์ของคุณทำงานจนจบหลักสูตรได้ดีขึ้นหรือไม่ หากไม่เป็นเช่นนั้น ให้ใช้ Robot Protractor ของคุณเพื่อช่วยคุณเปลี่ยนหัวข้อและลองอีกครั้ง อย่าลืมบันทึกการวัดหัวเรื่องและการสังเกตทั้งหมดลงในสมุดบันทึกของคุณในขณะที่คุณดำเนินการ
ทรัพยากรสำหรับการปฏิบัติ:
บทความที่เชื่อมโยงที่นี่สามารถใช้ได้ในกรณีที่คุณต้องการความช่วยเหลือเพิ่มเติมในระหว่างการดำเนินกิจกรรม
ตอนนี้คุณได้ดูและอภิปรายวิดีโอแล้ว ถึงเวลาฝึกฝนแล้ว!
ขั้นตอนที่ 1: ตั้งค่าสนามเพื่อสร้างหลักสูตรสลาลอม คุณสามารถใช้หลักสูตรเดียวกันกับที่คุณใช้ในหน่วยก่อนหน้าหรือหลักสูตรที่แสดงที่นี่ได้
ขั้นตอน 2: ใช้โหมดขับเคลื่อนเพื่อสร้างแบบจำลองการเคลื่อนไหวที่หุ่นยนต์ของคุณต้องดำเนินการให้สำเร็จ
- งานของคุณคือขับหุ่นยนต์เพื่อขนส่งลูกบอลกีฬาผ่านประตูแต่ละบาน โดยสิ้นสุดที่ประตู AprilTag บันทึกการขับขี่ของคุณ จากนั้นวางแผนว่าจะเข้ารหัสการเคลื่อนไหวนั้นอย่างไร
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับ: ใช้โครงการจากหน่วยก่อนหน้าเป็นพื้นฐานสำหรับงานฝึกหัดนี้ เปลี่ยนบล็อกในโครงการตามต้องการเพื่อนำทางหุ่นยนต์ของคุณในการส่งลูกบอลกีฬาได้สำเร็จ
ขั้นตอน 3: เขียนโค้ดให้หุ่นยนต์ทำงานให้สำเร็จ
- งานของคุณคือใช้แผนเส้นทางจากขั้นตอนที่ 2 เพื่อเขียนโค้ดให้หุ่นยนต์ขนส่งลูกบอลกีฬาผ่านประตูแต่ละบานและส่งไปยังเส้นชัย
- ใช้การ์ดงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางการปฏิบัติของคุณ
ขั้นตอน 4: ใช้กระบวนการ Predict-Drive-Measure-Code เพื่อทำซ้ำและปรับปรุงโครงการของคุณในการนำทางสลาลอมด้วยลูกบอลกีฬา:
- ทำนาย
- เลือกหัวข้อแรกที่คุณต้องการปรับเปลี่ยน ทำการทำนายเป็นกลุ่มเกี่ยวกับวิธีการปรับปรุงหัวเรื่องโดยใช้ประโยคนี้ และบันทึกไว้ในวารสารของคุณ:
- เราคิดว่าทิศทางควรอยู่ที่ประมาณ ____________ องศา
- เลือกหัวข้อแรกที่คุณต้องการปรับเปลี่ยน ทำการทำนายเป็นกลุ่มเกี่ยวกับวิธีการปรับปรุงหัวเรื่องโดยใช้ประโยคนี้ และบันทึกไว้ในวารสารของคุณ:
- ไดรฟ์
- ทดสอบการทำนายของคุณโดยขับเคลื่อนหุ่นยนต์ของคุณไปตามทิศทางที่คุณคาดการณ์ไว้ หากรู้สึกว่าไม่ถูกต้อง คุณจะเปลี่ยนแปลงอะไรเพื่อให้แม่นยำยิ่งขึ้นได้บ้าง? ถ้าไม่อย่างนั้นแล้วรู้สึกยังไงถึงจะดี?
- วัด
- วางหุ่นยนต์วัดมุมของคุณไว้ใต้หุ่นยนต์ จริงๆ แล้วคุณขับหุ่นยนต์ที่หัวข้อไหน?
- รหัส
- ใช้หัวข้อใหม่ของคุณในโครงการการเขียนโค้ดของคุณ! ปรับแต่งโครงการของคุณแล้วรันเพื่อทดสอบ หัวข้อที่ปรับปรุงแล้วจะช่วยให้หุ่นยนต์ของคุณทำงานจนจบหลักสูตรได้ดีขึ้นหรือไม่ หากไม่เป็นเช่นนั้น ให้ใช้ Robot Protractor ของคุณเพื่อช่วยคุณเปลี่ยนหัวข้อและลองอีกครั้ง อย่าลืมบันทึกการวัดหัวเรื่องและการสังเกตทั้งหมดลงในสมุดบันทึกของคุณในขณะที่คุณดำเนินการ
ทรัพยากรสำหรับการปฏิบัติ:
บทความที่เชื่อมโยงที่นี่สามารถใช้ได้ในกรณีที่คุณต้องการความช่วยเหลือเพิ่มเติมในระหว่างการดำเนินกิจกรรม
ทบทวนความคาดหวังสำหรับการทำงานกลุ่มที่จะเริ่มต้น เตือนนักเรียนสั้นๆ เกี่ยวกับบทบาทของพวกเขาเพื่อให้แน่ใจว่าพวกเขาได้รับการเตรียมพร้อมเพื่อความสำเร็จ
นักเรียนสามารถนำหลักสูตรสลาลอมจากหน่วยก่อนหน้ามาใช้ซ้ำเพื่อทำภารกิจนี้ให้เสร็จสมบูรณ์ได้ แนะนำให้นักเรียนเปรียบเทียบมุมการเคลื่อนไหวที่ใช้ก่อนหน้านี้และหัวข้อที่จะนำมาใช้ในบทเรียนนี้ เน้นย้ำความคล้ายคลึงกันเพื่อช่วยให้นักเรียนเข้าใจแนวคิดเรื่องหัวข้อและวิธีใช้ในโครงการ
แจกบัตรงานขั้นตอนที่ 2 ให้กับนักเรียน (Google / .docx / .pdf) ตรวจสอบให้แน่ใจว่าแต่ละกลุ่มมีหุ่นยนต์โปรแทรกเตอร์ เพื่อใช้ตลอดการฝึกซ้อม ในขณะที่นักเรียนกำลังขับรถและวางแผนเส้นทาง ให้เดินไปรอบๆ ห้องเพื่อตรวจสอบกับนักเรียนและพูดคุยเกี่ยวกับการเรียนรู้ของพวกเขา ถามคำถามเช่น:
- การเคลื่อนย้ายวัตถุส่งผลต่อการขับขี่ของคุณอย่างไร? มันง่ายหรือยากกว่าที่คุณคิด? ทำไม
- คุณบันทึกเส้นทางของคุณเพื่อเปลี่ยนทิศทางอย่างไร?
- อะไรที่คุณเคยทำมาก่อนที่ช่วยให้คุณทำภารกิจนี้สำเร็จได้? คุณจะนำการเรียนรู้นั้นไปใช้อย่างไร?
แจกบัตรงานขั้นตอนที่ 3 เมื่อนักเรียนได้เช็คอินกับคุณแล้วและตรงตามเกณฑ์ความสำเร็จ (Google / .docx / .pdf) ในขณะที่นักเรียนกำลังสร้าง ทดสอบ และทำซ้ำโครงการการเขียนโค้ดของตน ให้เดินไปรอบๆ ห้องและกระตุ้นให้นักเรียนร่วมอภิปรายเกี่ยวกับความคืบหน้าและความเข้าใจของพวกเขา ถามคำถามเช่น:
- หุ่นยนต์ของคุณเดินทางผ่านสลาลอมได้ไกลแค่ไหนแล้ว? ต่อไปคุณจะต้องคิดหาอะไร?
- ความใส่ใจในการวางแผนเส้นทางช่วยให้คุณสร้างโครงการของคุณสำเร็จได้อย่างไร?
- ส่วนที่ท้าทายที่สุดสำหรับคุณในงานนี้คืออะไร? กลุ่มของคุณทำงานร่วมกันเพื่อแก้ไขปัญหานั้นอย่างไร?
- คุณมีคำถามอื่นๆ อะไรเกี่ยวกับการเขียนโค้ดให้หุ่นยนต์ของคุณหมุนได้บ้าง?
ขั้นตอน 4 ออกแบบมาเพื่อส่งเสริมการทำซ้ำและการสำรวจของนักเรียนโดยการสลับระหว่างการขับเคลื่อนและการเขียนโค้ดเพื่อปรับปรุงโครงการของพวกเขาและค้นหาแนวทางที่ดีที่สุดสำหรับงาน Students should use the Predict-Drive-Measure-Code process to help them improve one thing about their robot's movement at a time by adjusting the way the robot turns. พวกเขาควรหมุนเวียนผ่านกระบวนการเพื่อปรับปรุงโครงการของพวกเขา เพื่ออำนวยความสะดวกให้กับกระบวนการนี้ ให้ถามคำถามเช่น:
- ผลการทดสอบของคุณตรงกับที่คุณคาดการณ์ไว้หรือไม่? คุณต้องทำการปรับปรุงอะไรบ้างเพื่อปรับปรุงความแม่นยำในการเลี้ยวของคุณ?
- การคาดเดาทิศทางก่อนขับรถจะช่วยให้คุณนำทางผ่านสลาลอมได้สำเร็จมากขึ้นอย่างไร
- คุณได้บันทึกอะไรไว้ในวารสารของคุณตลอดกระบวนการนี้บ้าง?
สรุป
ตอนนี้คุณได้ฝึกฝนแล้ว ก็ถึงเวลาที่จะแบ่งปันสิ่งที่คุณได้เรียนรู้ ตอบคำถามต่อไปนี้ในสมุดบันทึกของคุณเพื่อช่วยให้คุณสะท้อนการเรียนรู้ของคุณและเตรียมพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- ความแม่นยำมีความสำคัญต่อการขับขี่ การวางแผนเส้นทาง และการเขียนโค้ดมากเพียงใด ของแต่ละคนมันแตกต่างกันมั้ย? ทำไมหรือทำไมไม่?
- การสลับไปมาระหว่างการขับรถและการเขียนโค้ดช่วยให้คุณทำงานซ้ำๆ ในโครงการของคุณ อย่างไร
- มีสิ่งใดที่คุณเรียนรู้จากการฝึกฝนที่คุณไม่รู้จากการดูวิดีโอเพียงอย่างเดียว?
ตอนนี้คุณได้ฝึกฝนแล้ว ก็ถึงเวลาที่จะแบ่งปันสิ่งที่คุณได้เรียนรู้ ตอบคำถามต่อไปนี้ในสมุดบันทึกของคุณเพื่อช่วยให้คุณสะท้อนการเรียนรู้ของคุณและเตรียมพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- ความแม่นยำมีความสำคัญต่อการขับขี่ การวางแผนเส้นทาง และการเขียนโค้ดมากเพียงใด ของแต่ละคนมันแตกต่างกันมั้ย? ทำไมหรือทำไมไม่?
- การสลับไปมาระหว่างการขับรถและการเขียนโค้ดช่วยให้คุณทำงานซ้ำๆ ในโครงการของคุณ อย่างไร
- มีสิ่งใดที่คุณเรียนรู้จากการฝึกฝนที่คุณไม่รู้จากการดูวิดีโอเพียงอย่างเดียว?
แนะนำให้นักเรียนแบ่งปันการเรียนรู้ของพวกเขาในการอภิปรายทั้งชั้นเรียน ช่วยให้ผู้เรียนสะท้อนการเรียนรู้ของตนผ่านการปฏิบัติเพื่อบรรจบกันสู่ความเข้าใจร่วมกันหรือเป้าหมายการเรียนรู้
ใช้คำถามที่นักเรียนตอบในสมุดบันทึกของตนเป็นจุดเริ่มต้นของการอภิปราย ถามคำถามติดตามเพื่อชี้แนะความเข้าใจของนักเรียน:
- ความแม่นยำ:
- คุณคิดว่าตอนนี้คุณใส่ใจกับความแม่นยำมากขึ้นกว่าตอนเริ่มหลักสูตรหรือไม่? ทำไมหรือทำไมไม่?
- ความใส่ใจต่อความแม่นยำส่งผลต่อความสามารถของกลุ่มของคุณในการทำงานให้สำเร็จร่วมกันอย่างไร?
- เกี่ยวกับการทำซ้ำและการเรียนรู้ผ่านการปฏิบัติ:
- คุณจะอธิบายเหตุผลเบื้องหลังการทำซ้ำของคุณสำหรับงานนี้อย่างไร มันเหมือนหรือแตกต่างจากกลุ่มอื่นไหม? การทำซ้ำแบบใดจะดีกว่า? ทำไม
- มีอะไรบางอย่างที่คุณลองทำแล้วแต่ไม่ได้ผลตามที่ตั้งใจไว้หรือไม่? คุณได้เรียนรู้อะไรจากการปฏิบัตินั้น?
- ถ้ามีคนถามคุณว่าทำไมคุณถึงหันไปทางทิศเดิมแทนที่จะเคลื่อนที่เป็นมุม คุณจะตอบอย่างไร? คุณมีหลักฐานอะไรมาสนับสนุนคำอธิบายนั้น?
หมายเหตุ นักเรียนได้แบ่งปันความเข้าใจเกี่ยวกับความแม่นยำ การวนซ้ำ และการหมุนหุ่นยนต์เพื่อใช้เป็นข้อมูลอ้างอิงในขณะที่พวกเขาดำเนินหน่วยการเรียนรู้ ด้วยวิธีนี้ นักเรียนจะสามารถเห็นว่าความเข้าใจของพวกเขาเติบโตขึ้นอย่างไรตั้งแต่เริ่มต้นหน่วยจนถึงจุดสิ้นสุดของความท้าทาย ขณะที่พวกเขาสำรวจแนวคิดและความเข้าใจที่เกี่ยวข้องกับคำถามสำคัญ
เลือก ถัดไป > เพื่อไปยังบทเรียนถัดไป