
ในบทเรียนก่อนหน้านี้คุณได้เรียนรู้เกี่ยวกับกลไกความปลอดภัยและข้อควรระวังเกี่ยวกับหุ่นยนต์อุตสาหกรรม คุณได้เรียนรู้วิธีการหยุดแบบควบคุมเพื่อหยุดเครื่องจักรอย่างปลอดภัยเช่นแขนหุ่นยนต์ในกรณีฉุกเฉินรวมถึงวิธีที่เสาสัญญาณสื่อสารสถานะของเวิร์กเซลล์กับผู้ที่อยู่บนพื้นโรงงาน ในบทเรียนนี้คุณจะได้เรียนรู้ว่ามีการเข้ารหัสการหยุดและเสาสัญญาณที่ควบคุมได้อย่างไรเพื่อใช้กับ CTE Workcell
คุณจะได้เรียนรู้:
- เทมเพลตฐานแขน 6 แกนของ Brain CTE ทำงานอย่างไร
- วิธีเรียกใช้การหยุดแบบควบคุมโดยใช้ปุ่มบนเสาสัญญาณ
- วิธีหยุดแบบควบคุมจะถูกกระตุ้นเมื่อตรวจพบการชนโดยแขนหุ่นยนต์ 6 แกน
ในตอนท้ายของบทเรียนนี้ท่านจะสนทนาสิ่งที่ได้เรียนรู้ขณะตอบคำถามในสมุดบันทึกวิศวกรรมของท่าน
โครงการแม่แบบฐานแขนสมอง CTE 6 แกน
ในหลักสูตรความรู้เบื้องต้นเกี่ยวกับแขน 6 แกนพฤติกรรมการหยุดที่ควบคุมได้ของแขน 6 แกนและเสาสัญญาณถูกจัดการเบื้องหลัง ตอนนี้คุณกำลังใช้ Brain เป็นตัวควบคุมตรรกะที่ตั้งโปรแกรมได้ (PLC) พฤติกรรมเหล่านั้นจะต้องได้รับการเข้ารหัสในโครงการของคุณ โครงการในหลักสูตรนี้สร้างขึ้นจากโครงการเทมเพลต Brain CTE 6 - Axis Arm Base บล็อกที่จำเป็นสำหรับพฤติกรรมการหยุดแบบควบคุมของแขน 6 แกนและเสาสัญญาณได้รับการกำหนดค่าไว้ล่วงหน้าภายในโครงการนี้
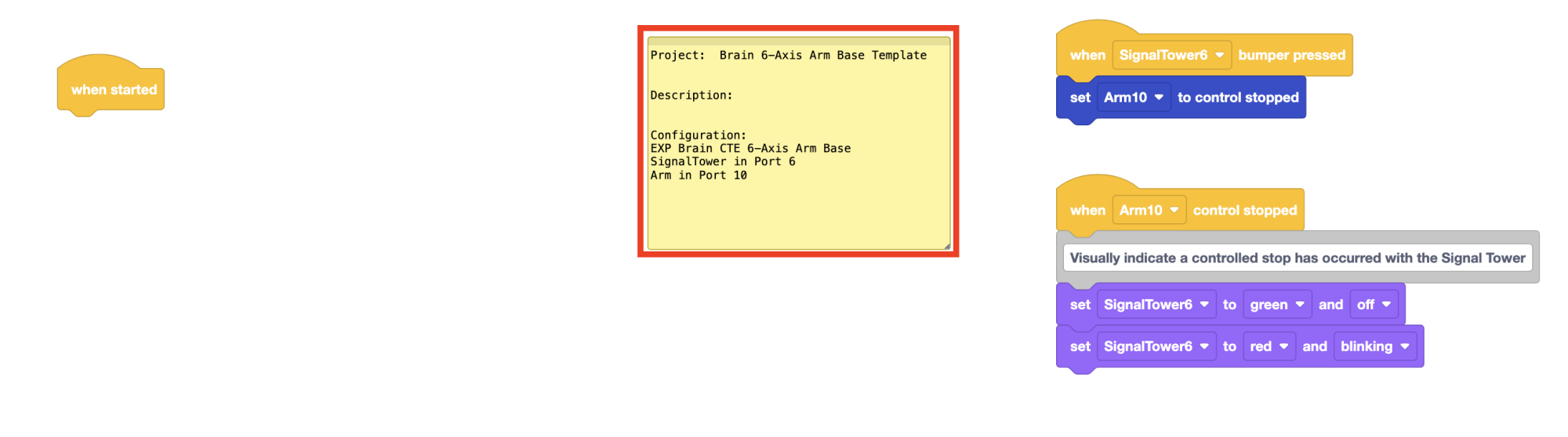
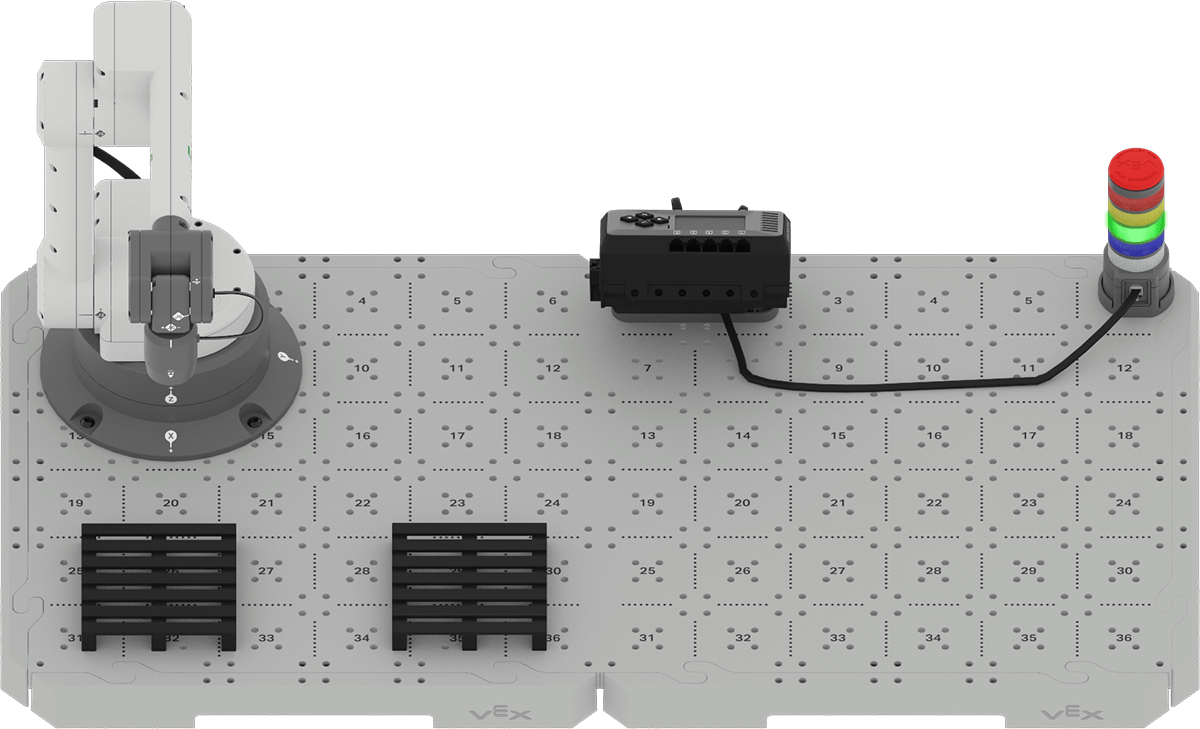
เมื่อคุณเปิดเทมเพลตคุณจะเห็นโน้ตที่มุมบนเช่นเดียวกับบล็อกสองกอง หมายเหตุแสดงการกำหนดค่าของแขน 6 แกนและหอสัญญาณ
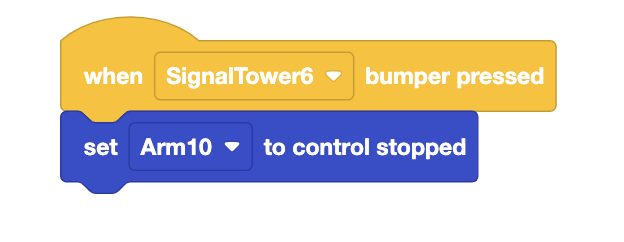
ทางด้านขวาของหมายเหตุคุณจะเห็นบล็อกอีกสองกองในโครงการ บล็อกกองแรกจะควบคุมสิ่งที่เกิดขึ้นเมื่อกดปุ่มด้านบนของ Signal Tower เมื่อกดปุ่มบนเสาสัญญาณแขนตั้งเพื่อ บล็อก การหยุดแบบควบคุมจะ เรียกใช้การหยุดแบบควบคุม
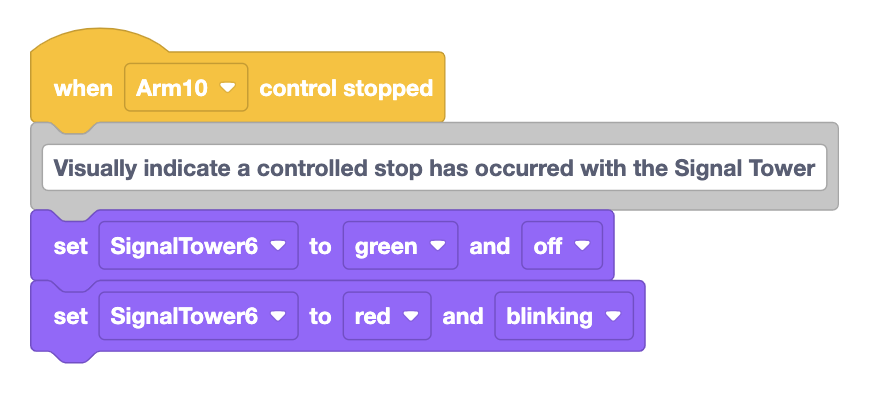
บล็อกกองที่สองจะควบคุมวิธีที่ Signal Tower สื่อสารสถานะของแขน 6 แกนกับผู้ใช้
สถานะการสื่อสารกับหอส่งสัญญาณ
ในหลักสูตรก่อนหน้านี้คุณได้เรียนรู้เกี่ยวกับการอ่านรหัสและการคาดการณ์การบันทึกเกี่ยวกับโครงการในสมุดบันทึกวิศวกรรมของคุณ คุณจะได้ฝึกฝนทักษะเหล่านี้ในขณะที่คุณเรียนรู้เกี่ยวกับบล็อกในโครงการเทมเพลตที่ถ่ายทอดสถานะของ CTE Workcell ให้กับผู้ใช้
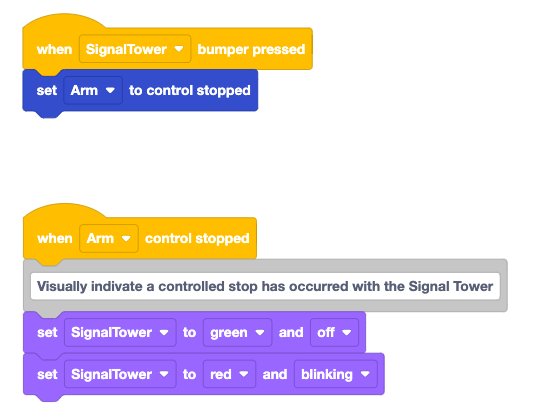
อ่านรหัสที่แสดงที่นี่ คาดการณ์ว่าคุณคิดว่าแขน 6 แกนจะทำอะไรและเสาสัญญาณจะแสดงอะไรเมื่อกดปุ่มบนเสาสัญญาณ บันทึกการคาดการณ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณ
ดูวิดีโอเพื่อดูการหยุดการทำงานที่ควบคุมได้ในขณะที่กำลังเรียกใช้โปรเจกต์เทมเพลต
พฤติกรรมของแขน 6 แกนและ Signal Tower ตรงกับการคาดการณ์ของคุณหรือไม่? เหตุใดจึงรู้สึกเช่นนั้น?
สำหรับข้อมูลของคุณ
CTE Workcell จะกระตุ้นการหยุดแบบควบคุมหากแขน 6 แกนชนกับสิ่งกีดขวาง ฟังก์ชันนี้มีการจัดการเบื้องหลัง ดูวิดีโอด้านล่างเพื่อดูการหยุดแบบควบคุมที่ถูกเรียกใช้ในขณะที่ดำเนินโครงการและแขน 6 แกนชนกับสิ่งกีดขวาง
แม้ว่า CTE Workcell จะไม่ได้เคลื่อนย้ายวัตถุหนักเนื่องจากแขนหุ่นยนต์อุตสาหกรรมอาจทำงานได้แต่การทำงานของตัวหยุดควบคุมยังคงมีความสำคัญ ความสามารถในการฝึกฝนการใช้คุณลักษณะด้านความปลอดภัยกับ CTE Workcell ของคุณจะช่วยให้คุณปฏิบัติตามขั้นตอนความปลอดภัยและใช้กลไกความปลอดภัยในรูปแบบที่ใช้ในสภาพแวดล้อมทางอุตสาหกรรมในโลกแห่งความเป็นจริง
การรีเซ็ตหลังจากมีการเรียกใช้ หยุดควบคุม
หลังจากหยุดแบบควบคุมถูกเรียกใช้ไม่ว่าจะด้วยปุ่มหยุดแบบควบคุมหรือโดยการขัดข้องโปรเจกต์จะต้องหยุดทำงานบนสมอง อย่าลืมกด ปุ่ม X บนสมองเพื่อหยุดโครงการ จากนั้นแขน 6 แกนสามารถเคลื่อนย้ายด้วยตนเองไปยังตำแหน่งที่ปลอดภัยเพื่อให้โครงการสามารถเริ่มต้นได้อีกครั้ง
กิจกรรม
ตอนนี้คุณได้เรียนรู้เกี่ยวกับโครงการเทมเพลต Brain CTE 6 - Axis Arm Base และดูวิดีโอที่แสดงฟังก์ชันการหยุดแบบควบคุมคุณจะเรียกใช้การหยุดแบบควบคุมด้วย CTE Workcell ของคุณ
ส่วนที่ 1: ปุ่มหยุดที่ควบคุม
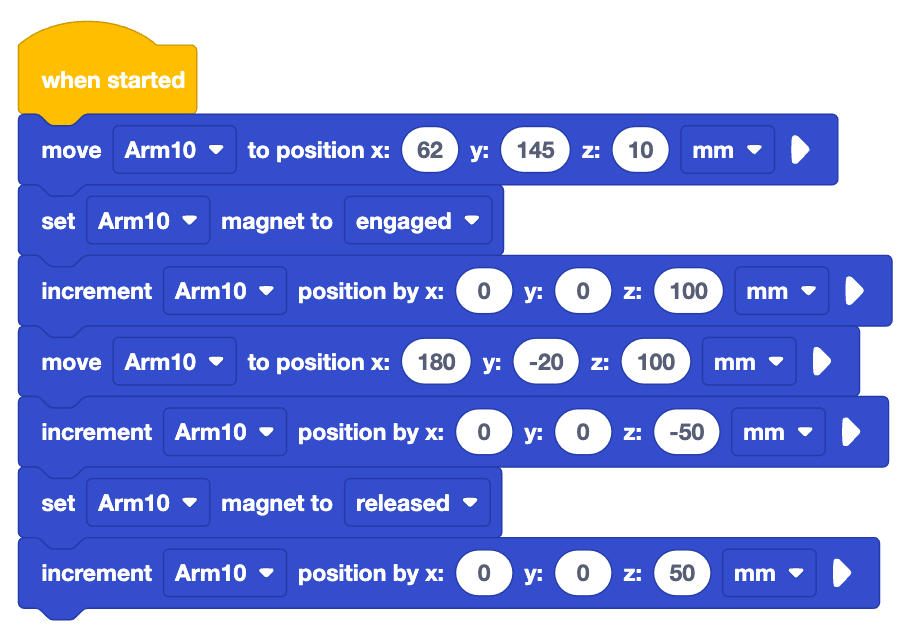
- เปิดโปรเจกต์กิจกรรม การนำทุกสิ่งมารวมกัน ของกลุ่มคุณใน VEXcode EXP หรือสร้างโปรเจกต์ใหม่ที่แสดงที่นี่ ดาวน์โหลดโครงการไปยังสมอง
- ดำเนินโครงการ ในขณะที่แขน 6 แกนกำลังเคลื่อนที่ให้ กดปุ่ม หยุดควบคุม บน Signal Tower สังเกตพฤติกรรมของ CTE Workcell อย่าลืมหยุดโครงการบนสมองเมื่อคุณทำเสร็จแล้ว
- บันทึกการสังเกตของคุณลงในสมุดบันทึกวิศวกรรมของคุณ โปรดตอบคำถามต่อไปนี้
- ท่านสังเกตเห็นอะไรเกี่ยวกับการเคลื่อนไหวของแขน 6 แกน? มันเปลี่ยนไปอย่างไรเมื่อกดปุ่ม หยุดควบคุม?
- คุณสังเกตเห็นอะไรเกี่ยวกับหอส่งสัญญาณ? มันเปลี่ยนไปอย่างไรเมื่อกดปุ่ม หยุดควบคุม?
- หากจำเป็นให้ดำเนินโครงการและกดปุ่ม หยุดควบคุม อีกครั้งเพื่อยืนยันคำตอบของคุณ
ส่วนที่ 2: การชน
- เรียกใช้โปรเจกต์จากภาค 1 อีกครั้ง เวลานี้ทำให้เกิดอุปสรรคในเส้นทางของแขน 6 แกน สังเกตพฤติกรรมของ CTE Workcell เมื่อแขน 6 แกนชนกับสิ่งกีดขวาง
- อุปสรรคอาจรวมถึงหนังสือหรือมือตรวจสอบ ให้แน่ใจว่าหากคุณใช้มือเป็นอุปสรรคในการม้วนแขนเสื้อกลับบนเสื้อผ้าหลวมๆและถอดกำไลหรือแหวนที่สามารถจับได้บนแขน 6 แกน
- อย่าลืมหยุดโครงการบนสมองเมื่อคุณทำเสร็จแล้ว
- บันทึกการสังเกตของคุณลงในสมุดบันทึกวิศวกรรมของคุณ โปรดตอบคำถามต่อไปนี้
- ท่านสังเกตเห็นอะไรเกี่ยวกับการเคลื่อนไหวของแขน 6 แกน? มันเปลี่ยนไปอย่างไรเมื่อแขน 6 แกนชนกับสิ่งกีดขวาง?
- คุณสังเกตเห็นอะไรเกี่ยวกับหอส่งสัญญาณ? มันเปลี่ยนไปอย่างไรเมื่อแขน 6 แกนชนกับสิ่งกีดขวาง?
- หากจำเป็นให้ดำเนินโครงการและใช้อุปสรรคเพื่อปิดกั้นเส้นทางของแขน 6 แกนอีกครั้งเพื่อยืนยันคำตอบของคุณ
ตรวจสอบความเข้าใจของคุณ
ก่อนเริ่มบทเรียนต่อไปตรวจสอบให้แน่ใจว่าท่านเข้าใจแนวคิดในบทเรียนนี้โดยตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของท่าน
ตรวจสอบคำถามเกี่ยวกับความเข้าใจของ คุณ > (Google Doc /.docx /.pdf)
เลือก ถัด > ไปเพื่อเริ่มกิจกรรม การนำทุกสิ่งมารวมกัน