
เล่น
ส่วนที่ 1 - ทีละขั้นตอน
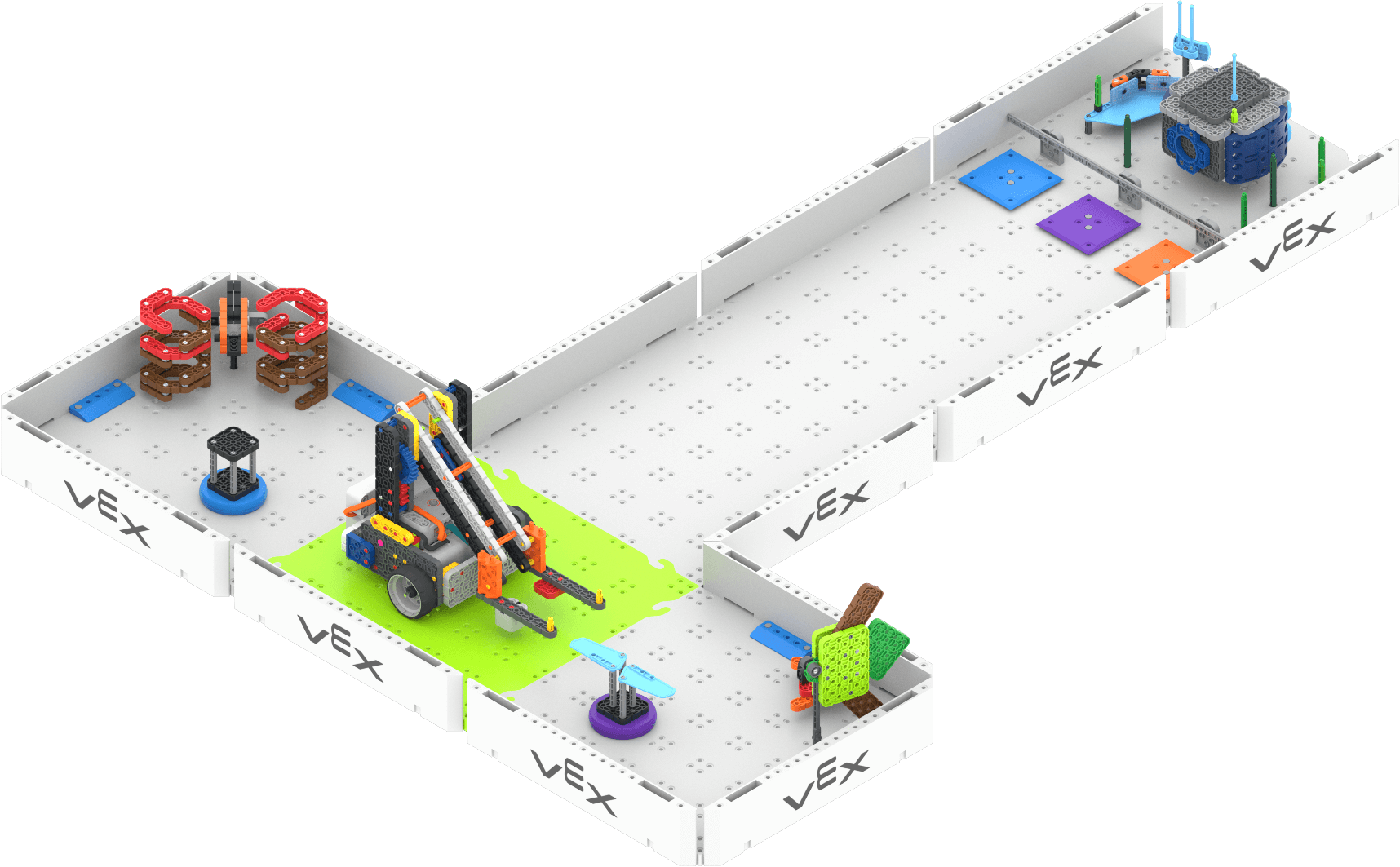
- สอนสอนนักเรียนว่าพวกเขาจะเข้าร่วมการแข่งขันการส่งมอบเซ็นเซอร์ด้วยหุ่นยนต์ฮีโร่ของพวกเขา ขั้นแรกพวกเขาจะฝึกซ้อมสำหรับการแข่งขันโดยการควบคุมรีโมตในการขับเคลื่อนหุ่นยนต์ฮีโร่เพื่อเคลื่อนย้ายเซ็นเซอร์ไปยังห้องปฏิบัติการใต้น้ำในสนาม ดูวิดีโอด้านล่างเพื่อเรียนรู้เพิ่มเติมเกี่ยวกับองค์ประกอบของเกมและข้อควรพิจารณาสำหรับกิจกรรม Sensor Delivery ตอนท้ายของวิดีโอจะแสดงตัวอย่างการขับเคลื่อนหุ่นยนต์ฮีโร่เพื่อทำภารกิจให้สำเร็จ
หมายเหตุ: คุณสามารถเลือกวิธีที่นักเรียนโต้ตอบกับเนื้อหาวิดีโอได้ วิดีโอนี้ฝังไว้ในภาพสไลด์โชว์ Lab 1 เพื่อให้สามารถแชร์กับนักเรียนได้อย่างง่ายดาย หรือคุณอาจเลือกชมวิดีโอด้วยตนเองและนำเสนอข้อมูลให้กับนักเรียนในชั้นเรียนก็ได้
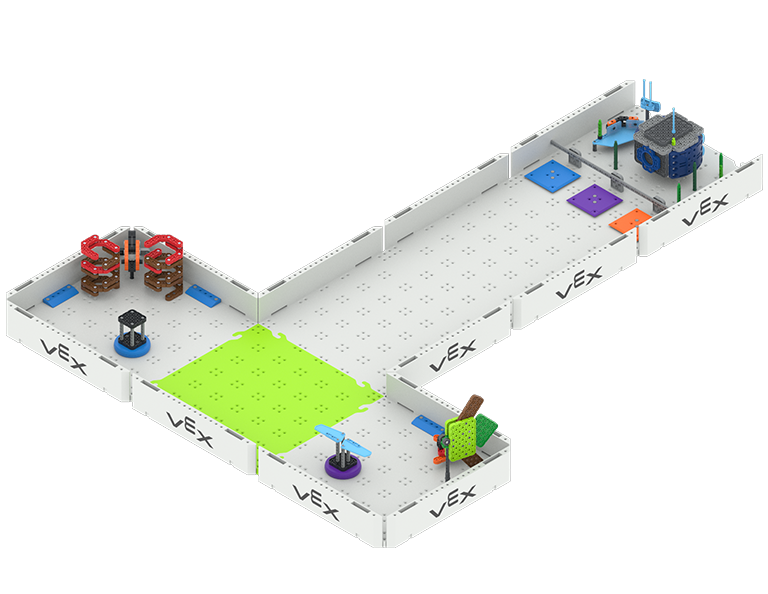
- แบบจำลองแบบจำลองสำหรับให้นักเรียนควบคุมการขับเคลื่อนหุ่นยนต์ฮีโร่เพื่อเคลื่อนย้ายวัตถุในเกม เช่น เซ็นเซอร์บนสนาม เป้าหมายของการฝึกนี้คือการย้ายเซนเซอร์ไปยังห้องปฏิบัติการใต้น้ำบนสนาม
- ขั้นแรก จำลองวิธีการเปิด VEXcode GO ให้กับนักเรียน connect their Brain to their device, และเปิดแท็บไดรฟ์

เลือกแท็บไดรฟ์ หมายเหตุ: เมื่อคุณเชื่อมต่อหุ่นยนต์กับอุปกรณ์เป็นครั้งแรก Gyro ที่ติดตั้งอยู่ใน Brain อาจปรับเทียบ ทำให้หุ่นยนต์เคลื่อนที่เองชั่วขณะหนึ่ง นี่คือพฤติกรรมที่คาดไว้ อย่าสัมผัสหุ่นยนต์ในขณะที่กำลังปรับเทียบ
- ต่อไปนี้ เป็นแบบอย่างให้กับนักเรียนในการเลือกตัวเลือกมอเตอร์ในพอร์ต 2 เพื่อควบคุมมอเตอร์แขนของหุ่นยนต์ฮีโร่
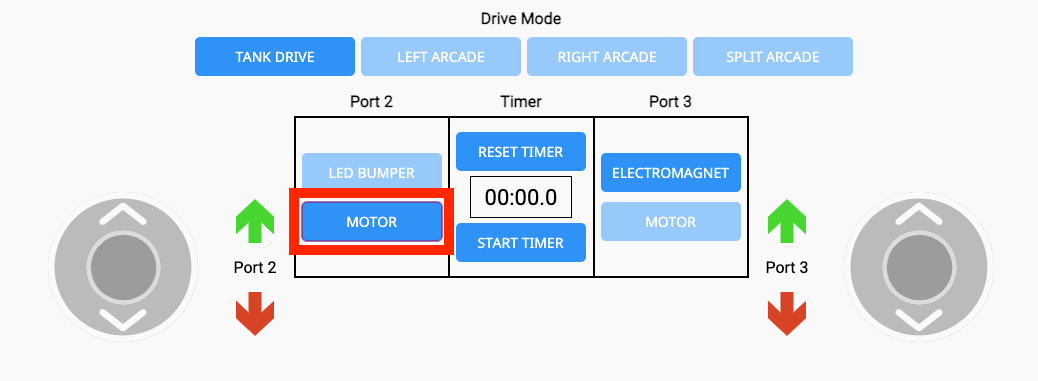
เลือกตัวเลือกมอเตอร์สำหรับพอร์ต 2 - แบบจำลองสำหรับให้นักเรียนได้ทดลองเปลี่ยนโหมดการขับขี่โดยเลือกปุ่มต่างๆ ได้แก่ Tank Drive, Left Arcade, Right Arcade หรือ Split Arcade ดูคลิปวิดีโอข้างล่างเพื่อดูการเคลื่อนไหวของจอยสติ๊กเมื่อเลือกโหมดไดรฟ์แต่ละโหมด
ไฟล์วีดีโอ- เพื่อการอ้างอิง โหมดไดรฟ์สอดคล้องกับการควบคุมต่อไปนี้:
- Tank Drive: จอยสติ๊กแต่ละอันจะควบคุมมอเตอร์ที่แตกต่างกัน
- ซ้าย อาร์เคด: จอยสติ๊กหนึ่งตัวที่ควบคุมมอเตอร์ทั้งสองตัว จอยสติ๊กจะอยู่ทางด้านซ้ายของหน้าจอ
- อาร์เคดขวา: จอยสติ๊กหนึ่งตัวที่ควบคุมมอเตอร์ทั้งสองตัว จอยสติ๊กจะอยู่ทางด้านขวาของหน้าจอ
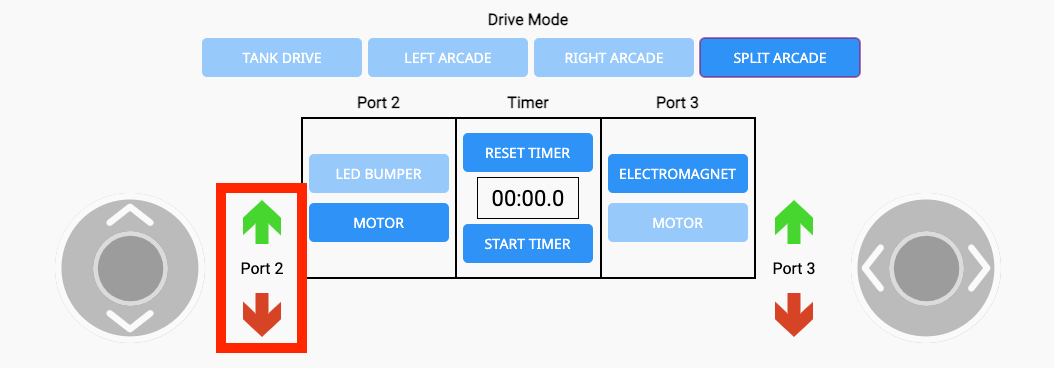
- Split Arcade: จอยสติ๊กสองอัน ตัวหนึ่งควบคุมการเคลื่อนที่ซ้ายและขวา และอีกตัวหนึ่งควบคุมการเคลื่อนที่ไปข้างหน้าและถอยหลัง
- แบบจำลองสำหรับนักเรียนในการยกและลดมอเตอร์แขนโดยใช้ลูกศรสีเขียวและสีแดงรอบพอร์ต 2
- หมายเหตุ: ลูกศรจะสอดคล้องกับทิศทางที่มอเตอร์กำลังหมุน ไม่จำเป็นต้องสอดคล้องกับการเคลื่อนไหวขึ้นและลงของแขนเสมอไป
พอร์ต 2 การควบคุมมอเตอร์ - ขั้นตอนต่อไป ให้ตั้ง Hero Robot บนไทล์เริ่มต้นสีเขียว และสร้างแบบจำลองการขับเคลื่อนและเคลื่อนย้ายเซ็นเซอร์โดยใช้แท็บ Drive ตามที่แสดงในวิดีโอในขั้นตอน Instruct
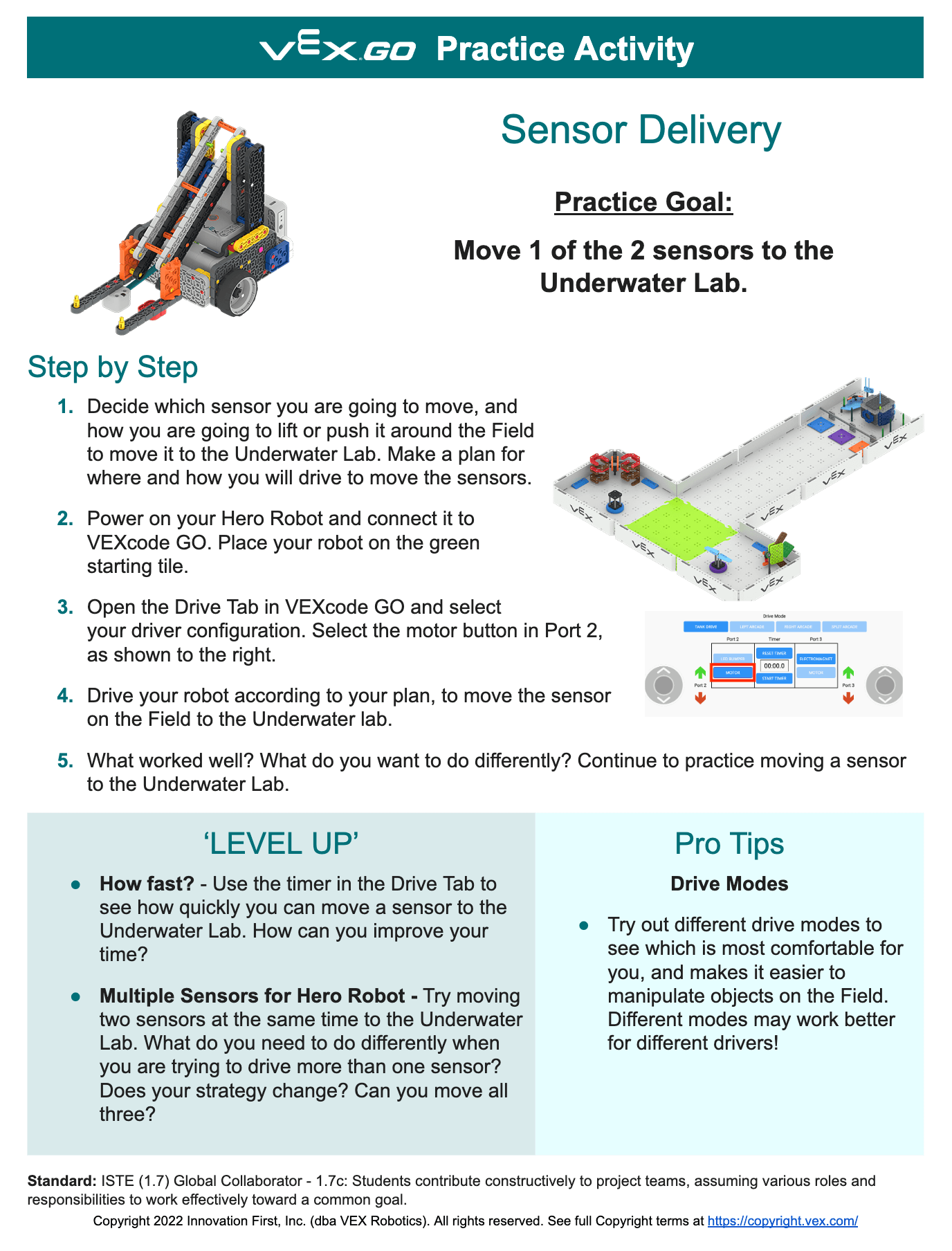
การสำรวจวิทยาศาสตร์ทางทะเล - ขั้นที่ 1 ภาคสนามที่ - ขณะที่นักเรียนกำลังฝึกการขับเคลื่อนหุ่นยนต์ฮีโร่เพื่อเคลื่อนย้ายเซ็นเซอร์ไปยังห้องปฏิบัติการใต้น้ำบนสนาม คุณสามารถใช้กิจกรรมฝึกฝนการส่งมอบเซ็นเซอร์ได้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการปฏิบัติ
-
หากนักเรียนทำภารกิจฝึกฝนเสร็จเร็ว และต้องการความท้าทายเพิ่มเติม ให้พวกเขาลองใช้ส่วนขยาย 'Level Up' ใดส่วนขยายหนึ่งในกิจกรรมฝึกฝนการส่งมอบเซ็นเซอร์
-
- อำนวยความสะดวกอำนวยความสะดวกในการผลัดกันและการทำงานร่วมกันระหว่างทีมในขณะที่พวกเขากำลังฝึกขับหุ่นยนต์ฮีโร่ของพวกเขา ขณะที่คุณเดินไปรอบๆ ห้อง ให้ถามคำถามเช่น:
- คุณผลัดกันขับรถในทีมของคุณอย่างไรเพื่อให้ทุกคนมีโอกาสฝึกซ้อม?
- อะไรเคลื่อนไหวได้ง่ายกว่ากันสำหรับคุณแต่ละคน – เซ็นเซอร์สีม่วงหรือสีน้ำเงิน? ทำไม
- สไตล์การขับขี่ของคุณมีความคล้ายคลึงกันอย่างไรบ้าง? แตกต่างกันอย่างไร? คุณเรียนรู้อะไรจากกันและกันได้บ้างเพื่อทำให้คุณทั้งคู่ขับรถได้ดีขึ้น?
- ความท้าทายประการหนึ่งที่คุณกำลังร่วมกันแก้ไขคืออะไร? คุณได้ลองใช้กลยุทธ์การแก้ไขปัญหาอะไรบ้างจนถึงตอนนี้? ต่อไปจะลองอะไร?
คุณอาจต้องการมีพื้นที่หลายแห่งไว้ฝึกซ้อมรอบห้อง พื้นที่สนาม Stage 1 สามารถแยกออกเป็นช่องๆ ได้ เพื่อให้คุณสามารถกระจายพื้นที่ฝึกซ้อมออกไปทั่วห้องเรียนได้ หรือเพียงแค่เสนอให้เด็กนักเรียนฝึกการเคลื่อนที่บนพื้นผิวเรียบ เช่น พื้น หรือโต๊ะขนาดใหญ่
อำนวยความสะดวกในการสนทนาเกี่ยวกับกลยุทธ์ของผู้ขับขี่ในขณะที่นักเรียนกำลังฝึกฝน. คุณอาจต้องการจัดสรรเวลาเพิ่มเติมสำหรับการเล่นส่วนที่ 1 เพื่อให้เด็กๆ ทุกคนมีเวลาเพียงพอที่จะทำการขับรถอย่างสบายใจ และพวกเขาสามารถเริ่มคิดเกี่ยวกับกลยุทธ์ได้ ส่งเสริมให้ทีมต่างๆ มองดูสิ่งที่คนอื่นๆ ทำรอบๆ ห้อง เพื่อที่พวกเขาจะได้เรียนรู้จากประสบการณ์ของทีมอื่นด้วยเช่นกัน
- พวกเขาค้นพบอะไรผ่านการฝึกฝนบ้างที่ช่วยให้พวกเขาประสบความสำเร็จ?
- อะไรช่วยให้พวกเขาเคลื่อนเซ็นเซอร์ได้เร็วขึ้น?
- คุณจะเลือกเซ็นเซอร์ตัวไหนที่จะเคลื่อนไหวก่อน?
- เตือนเตือนนักเรียนให้ลองใช้โหมดการขับขี่ที่แตกต่างกันเพื่อดูว่าโหมดใดเหมาะกับพวกเขาที่สุด โหมดการขับขี่ที่แตกต่างกันอาจทำงานได้ดีกว่าสำหรับผู้ขับขี่ที่แตกต่างกัน
เตือนนักเรียนว่าเป้าหมายของกิจกรรมนี้คือการย้ายเซ็นเซอร์เพียงตัวเดียวไปยังห้องปฏิบัติการใต้น้ำ กระตุ้นให้พวกเขาลองเคลื่อนย้ายเซ็นเซอร์ต่างๆ เพื่อดูว่าตำแหน่งเซ็นเซอร์บางตัวจะง่ายกว่าสำหรับพวกเขาหรือไม่ พวกเขาสามารถเลือกวัตถุในเกมที่จะเคลื่อนย้ายได้ในการฝึกซ้อมและในการแข่งขัน
- ถามถามนักเรียนเกี่ยวกับว่าการกระทำที่พวกเขาทำกับหุ่นยนต์ฮีโร่ของพวกเขาอาจเชื่อมโยงกับกิจกรรมจริงที่กำลังได้รับการวิจัยด้วย ROV (Remote Operated Vehicle) ใต้น้ำในปีนี้ได้อย่างไร เหตุใดการเคลื่อนย้ายเซ็นเซอร์ใต้น้ำโดยใช้ ROV จึงอาจทำได้ยาก
พักเบรกกลางเกม & อภิปรายเป็นกลุ่ม
ทันทีที่กลุ่ม แต่ละกลุ่มย้ายตัวอย่างไปยัง Underwater Labสำเร็จ ให้มารวมตัวกันเพื่อสนทนาสั้นๆ
ตอนนี้ นักเรียนได้ฝึกการขับหุ่นยนต์ฮีโร่เพื่อเคลื่อนย้ายสิ่งของบนสนามแล้ว มาพูดคุยกันว่าการฝึกฝนดังกล่าวสามารถช่วยให้นักเรียนประสบความสำเร็จในการแข่งขันส่งมอบเซ็นเซอร์ได้อย่างไร
ก่อนอื่นขอแนะนำการแข่งขัน Sensor Delivery:
- เป้าหมายของการแข่งขันคือทำคะแนนให้ได้มากที่สุดเท่าที่จะทำได้โดยการย้ายเซ็นเซอร์ไปยังห้องปฏิบัติการใต้น้ำภายในเวลาการแข่งขันหนึ่งนาที
- วัตถุในเกมแต่ละชิ้นที่สามารถเคลื่อนย้ายไปยัง Underwater Lab สำเร็จตามสีที่ตรงกันเมื่อสิ้นสุดการแข่งขันจะมีค่าหนึ่งคะแนน
- แต่ละทีมจะนำสิ่งที่เรียนรู้จากการฝึกซ้อมมาประยุกต์ใช้เพื่อช่วยให้ทำคะแนนได้มากที่สุดในการแข่งขัน!
จากนั้นพูดคุยว่านักเรียนสามารถนำการเรียนรู้ไปประยุกต์ใช้เพื่อช่วยให้ประสบความสำเร็จในการแข่งขันได้อย่างไร
- สิ่งหนึ่งที่คุณได้เรียนรู้จากการฝึกซ้อมที่จะช่วยให้คุณทำคะแนนในการแข่งขันคืออะไร?
- มีอะไรบ้างที่ช่วยให้คุณเคลื่อนย้ายวัตถุได้รวดเร็วยิ่งขึ้น?
- ในทางปฏิบัติ คุณจะย้ายเซ็นเซอร์เพียงตัวเดียวไปยังห้องแล็บใต้น้ำ คุณคิดว่าจะพยายามเคลื่อนย้ายเซ็นเซอร์ให้มากขึ้นในการแข่งขันอย่างไร?
- ฮีโร่หุ่นยนต์ของคุณจะเคลื่อนไหวอย่างไรบนสนามเพื่อทำคะแนนในระหว่างการแข่งขัน? มีอะไรที่คุณต้องการหลีกเลี่ยงไหม?
ตอนที่ 2 - ทีละขั้นตอน
- สอนสอนนักเรียนว่าตอนนี้พวกเขาจะเข้าร่วมการแข่งขัน Sensor Delivery! เป้าหมายของการแข่งขันคือทำคะแนนให้ได้มากที่สุดเท่าที่จะทำได้โดยการย้ายเซ็นเซอร์ไปยังห้องปฏิบัติการใต้น้ำภายในเวลาการแข่งขันหนึ่งนาที
ใช้กิจกรรมการแข่งขันการส่งมอบเซ็นเซอร์ (Google / .docx / .pdf) เพื่อเป็นแนวทางสำหรับนักเรียนเมื่อคุณเข้าร่วมการแข่งขัน

- แบบจำลองที่แบบจำลองสำหรับนักเรียนว่าพวกเขาจะเข้าร่วมการแข่งขันอย่างไร และการแข่งขันจะดำเนินไปอย่างไรในห้องเรียน
หากต้องการเรียนรู้เพิ่มเติมเกี่ยวกับการจัดการแข่งขัน VEX GO Classroom โปรดดูบทความนี้
- จำลองการตั้งค่าหุ่นยนต์ฮีโร่บนสนามเพื่อเริ่มการแข่งขัน
- แบ่งปันลำดับการแข่งขันและความคาดหวังกับนักเรียน เพื่อให้พวกเขารู้ว่าควรทำสิ่งใดในระหว่างการแข่งขัน ก่อนและหลังถึงตาขับรถ
-
คุณสามารถใช้เทมเพลตลำดับการจับคู่นี้ได้ (Google / .docx / .pdf) เพื่อแสดงลำดับการแข่งขันของทีมต่างๆ คุณยังสามารถใช้แผ่นงานนี้เพื่อติดตามคะแนนหลังการแข่งขันแต่ละนัดได้ พยายามมีไม้ขีดไฟเพียงพอเพื่อให้นักเรียนแต่ละคนมีโอกาสขับหุ่นยนต์อย่างน้อยหนึ่งครั้ง
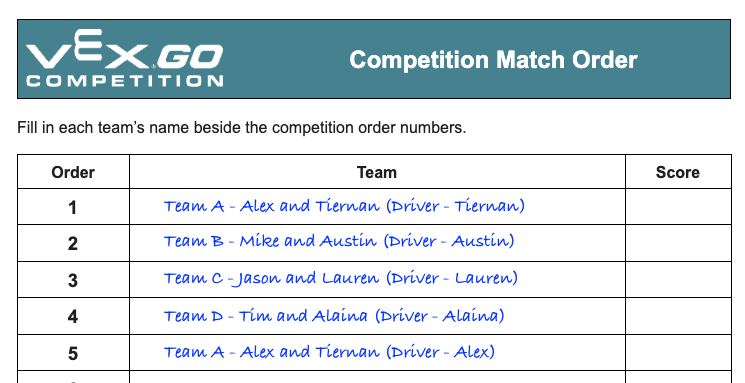
ตัวอย่างใบคำสั่งการจับคู่ - สาธิตให้กับผู้เรียนเห็นว่าคุณจะใช้งานตัวจับเวลาอย่างไร รวมถึงสิ่งที่ต้องดูและฟังเพื่อทราบว่าควรเริ่มและหยุดขับเคลื่อนหุ่นยนต์บนสนามเมื่อใด
- แสดงให้เด็กนักเรียนทราบว่าสามารถนั่งได้ที่ใดในระหว่างการแข่งขัน หากคุณมีพื้นที่ฝึกซ้อมหรือพื้นที่อื่นที่นักเรียนสามารถเข้าไปได้ระหว่างการแข่งขัน โปรดแสดงพื้นที่เหล่านี้ให้พวกเขาเห็นด้วย และอธิบายว่าจะใช้งานพื้นที่เหล่านี้อย่างไร
- ทบทวนความคาดหวังในการเป็นผู้เข้าร่วมการแข่งขันอย่างเคารพผู้อื่น ส่งเสริมให้เด็กนักเรียนให้กำลังใจซึ่งกันและกัน และรู้สึกตื่นเต้นไปกับการแข่งขัน – นี่จะเป็นประสบการณ์ห้องเรียนที่สนุกสนาน! ให้แน่ใจว่านักเรียนแสดงน้ำใจนักกีฬาที่ดีทั้งก่อน ระหว่าง และหลังการแข่งขันแต่ละครั้ง
-
- สร้างแบบจำลองว่าการแข่งขันดำเนินไปอย่างไร เริ่มจับเวลาและขับหุ่นยนต์ฮีโร่บนสนามเพื่อเคลื่อนย้ายเซ็นเซอร์ไปยังห้องทดลองใต้น้ำ เมื่อเวลาถึงหนึ่งนาทีให้หยุดขับรถ เมื่อสิ้นสุดการสาธิต ให้นับจำนวนเซ็นเซอร์ที่อยู่ในห้องปฏิบัติการใต้น้ำที่มีสีที่ถูกต้อง และรวมคะแนนกับนักเรียน
- หากคุณกำลังใช้ก ลีดเดอร์บอร์ด VEX GO, แสดงให้นักเรียนเห็นว่าคะแนนจะถูกป้อนและแสดงบนลีดเดอร์บอร์ดอย่างไร
- แบบจำลองวิธีการรีเซ็ตสนามเพื่อการแข่งขันครั้งต่อไป เซ็นเซอร์ควรอยู่บนกระเบื้องปลาและสาหร่ายตามที่แสดงในภาพด้านบน
- อำนวยความสะดวกอำนวยความสะดวกในการแข่งขันในชั้นเรียนและกระตุ้นให้นักเรียนสนทนาเกี่ยวกับการขับรถและการทำงานร่วมกันระหว่างการแข่งขัน ใช้ตัวกระตุ้นการสนทนา เช่น:
- ก่อนเริ่มการแข่งขัน:
- สมาชิกทีมไหนจะเป็นผู้ขับรถ? คุณสามารถอธิบายกลยุทธ์ของคุณ หรือสิ่งที่คุณจะพยายามทำในแมตช์นี้ได้หรือไม่?
- สิ่งหนึ่งที่คุณจะพยายามทำเหมือนตอนฝึกซ้อมหรือแมตช์ก่อนๆ คืออะไร? ทำไม
- สิ่งหนึ่งที่คุณจะพยายามทำแตกต่างไปจากการฝึกซ้อมหรือการแข่งขันครั้งก่อนคืออะไร? ทำไม
- ระหว่างการแข่งขัน:
- ดูว่าคนขับควบคุมความเร็วของหุ่นยนต์อย่างไร คุณสังเกตเห็นอะไร?
- ชมว่าคนขับใช้งานแขนของหุ่นยนต์อย่างไร คุณสังเกตเห็นอะไร?
- ลองสังเกตดูว่าคนขับกำลังเคลื่อนที่ไปรอบๆ ปล่องภูเขาไฟอย่างไร คุณสังเกตเห็นอะไร?
- หลังจบการแข่งขัน:
- คุณได้เรียนรู้อะไรจากการขับรถบ้างที่จะนำมาใช้ในการแข่งขันครั้งต่อไป?
- คุณได้เรียนรู้อะไรบ้างจากการดูนักแข่งคนอื่นที่สามารถช่วยคุณในการแข่งขันได้?
- ก่อนเริ่มการแข่งขัน:
- เตือนใจเตือนใจนักเรียนว่าการดูการแข่งขันสามารถช่วยให้พวกเขาเรียนรู้สิ่งต่าง ๆ เกี่ยวกับกลยุทธ์ของตนเองได้ พวกเขาอาจมองเห็นสิ่งที่พวกเขาต้องการลอง หรือวัตถุที่พวกเขาอยากหลีกเลี่ยง โดยการสังเกตว่าทีมอื่น ๆ เข้าหาการแข่งขันอย่างไร เพียงเพราะว่าไม่ใช่ตาพวกเขาที่จะขับรถ ไม่ได้หมายความว่าพวกเขาไม่มีอะไรจะทำ
คุณอาจต้องการให้นักเรียนมีวิธีจดบันทึกในขณะที่ดูการแข่งขันโดยใช้ใบงานพิมพ์เขียว (Google / .docx / .pdf) หรือเอกสารรวบรวมข้อมูล (Google / .docx / .pdf). วิธีนี้ช่วยให้พวกเขาสามารถติดตามแนวคิดกลยุทธ์ได้อย่างเป็นรูปธรรมในขณะที่เตรียมพร้อมสำหรับการแข่งขันครั้งต่อไป
- ถามขอให้เด็กนักเรียนคิดว่าประสบการณ์ที่พวกเขามีในการแข่งขันครั้งนี้สามารถช่วยพวกเขาได้อย่างไรในครั้งต่อไปที่พวกเขาอยู่ในทีมหรือเข้าร่วมการแข่งขัน พวกเขาได้เรียนรู้อะไรเกี่ยวกับการเป็นเพื่อนร่วมทีมที่ดี ซึ่งสามารถนำไปปรับใช้ในการแข่งขัน VEX GO ครั้งต่อไปได้? พวกเขาได้เรียนรู้อะไรบ้างจากการเป็นผู้ชม ซึ่งพวกเขาสามารถนำไปใช้ในครั้งต่อไปที่รับชมการแข่งขันประเภทใดก็ตาม?