
Rekabet etmek
Artık Buckyball'u tespit edip sahanın dışına itmek için bir proje oluşturup test ettiğinize göre, Hisset ve Süpür Mücadelesi'ne hazırsınız.
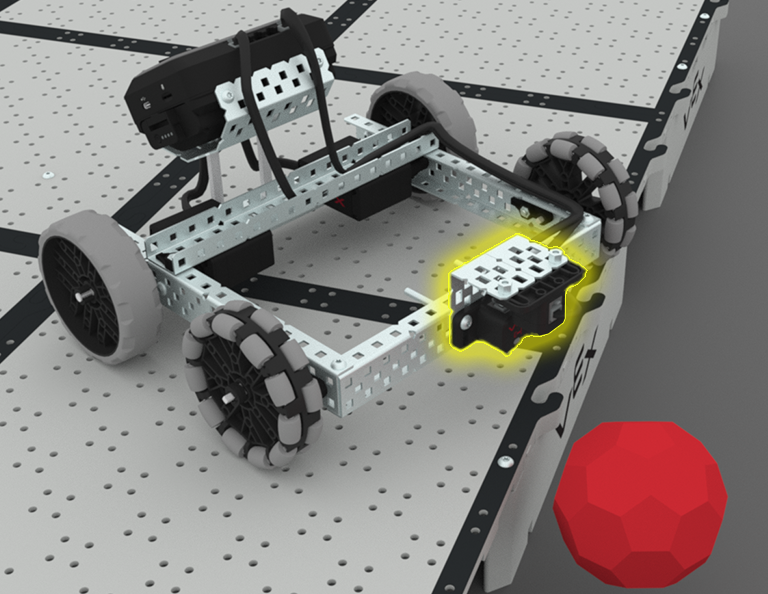
Bu mücadelenin amacı, dört Buckyball'u en kısa sürede sahanın dışına itmektir. Aşağıdaki animasyon, Saha'nın nasıl kurulacağına ve yarışmanın nasıl başlatılacağına dair bir örneği göstermektedir. Robotun ilk Buckyball'u algılayıp ittiğini, ardından bir sonraki Buckyball'u algılamak için hareket ettiğini göreceksiniz. Animasyon daha sonra dördüncü Buckyball'un saha dışına itilmesiyle zamanlı denemenin sonunu gösterecek! Sense and Sweep Challenge'ı tamamlamak için bu belgedeki adımları izleyin.
Sense and Sweep Challenge'ı tamamladığınızda öğretmeninizle iletişime geçin. Meydan okumanın sonuçlarını mühendislik not defterinize kaydettiğinizden emin olun.
Özet Yansıması
Artık bir strateji oluşturup Sense and Sweep Challenge'da yarıştığınıza göre, bu Ders'te öğrendiklerinizi ve yaptıklarınızı düşünmenin zamanı geldi. Mühendislik defterinizde yeni bir sayfa açarak düşüncelerinizi gözden geçirmeye başlayın.
Aşağıdaki kavramların her biri için mühendislik not defterinizde kendinizi acemi, çırak veya uzman olarak derecelendirin. Her kavram için kendinize neden bu puanı verdiğinizi kısaca açıklayın:
- BaseBot'unuza Mesafe Sensörünü ekleyin ve bir VEXcode EXP projesinde Buckyball'u tespit etmek için kullanın
- Robotunuzun Buckyball'ları algılayıp Saha dışına taşımasını sağlayacak bir projeyi inşa etmek ve yinelemek
- Oyun stratejimizi destekleyen bir VEXcode EXP projesi oluşturmak için ekip üyelerimle iş birliği yapıyorum
Hangi kategoriye girdiğinizi belirlemenize yardımcı olması için bu tabloyu kullanın.
| Uzman | Kavramı tam olarak anladığımı ve bunu başkasına öğretebileceğimi düşünüyorum. |
| Çırak | Yarışmaya katılabilecek kadar kavramı anladığımı düşünüyorum. |
| Acemi | Konsepti anlamadığımı ve meydan okumayı nasıl tamamlayacağımı bilmediğimi hissediyorum. |
Sırada Ne Var?
Bu Derste Mesafe Sensörünü ve bunun bir robotta nesneleri algılamak için nasıl kullanılabileceğini öğrendiniz. Ayrıca sensör geri bildirimi olan bir projede [Bekle] bloğunun nasıl kullanılacağını da öğrendiniz. VEXcode EXP projenizi oluşturup üzerinde yinelemeler yaparak Buckyball'ları tespit edip Saha dışına taşıdınız ve Algıla ve Süpür yarışmasında yarıştınız.
Bir sonraki Derste şunları yapacaksınız:
- Optik Sensör hakkında bilgi edinin ve bir projede nasıl kullanılabileceğini öğrenin
- Bir algoritmanın ne olduğunu ve nasıl kullanılabileceğini öğrenin
- Sweep the Field Challenge'da yarışın
Ders Genel Bakışına geri dönmek için< DersDön'ü seçin.
Sonraki Ders >seçerek Ders 4'e geçin ve Optik Sensör ve algoritmalar hakkında bilgi edinin.