
แข่งขัน
ตอนนี้คุณได้สร้างและทดสอบโครงการตรวจจับและผลักบัคกี้บอลออกจากสนามแล้วคุณพร้อมสำหรับการท้าทายความรู้สึกและการกวาดล้างแล้ว
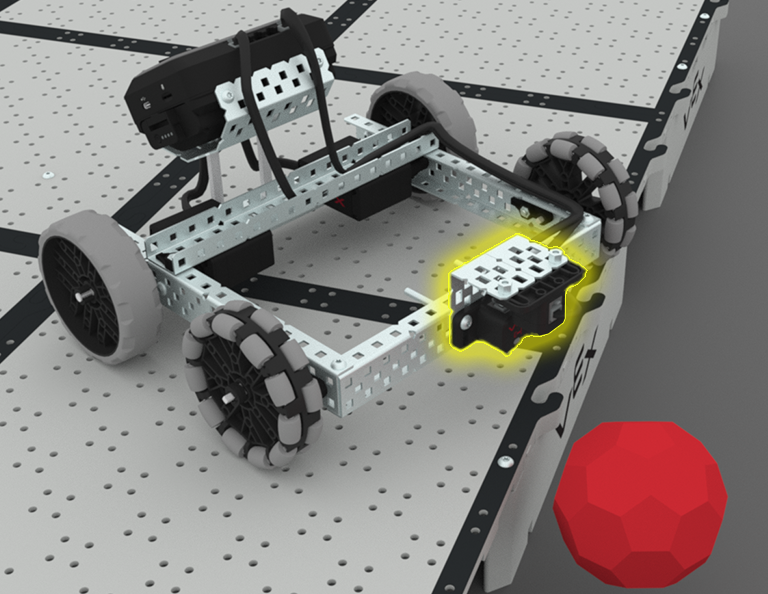
เป้าหมายของความท้าทายนี้คือการผลักบัคกี้บอลทั้งสี่ออกจากสนามในเวลาที่เร็วที่สุด ภาพเคลื่อนไหวด้านล่างแสดงตัวอย่างวิธีการตั้งค่าฟิลด์และเริ่มการแข่งขัน คุณจะเห็นหุ่นยนต์ตรวจจับและผลักบัคกี้บอลลูกแรกออกจากนั้นย้ายไปตรวจจับบัคกี้บอลลูกต่อไป จากนั้นแอนิเมชั่นจะแสดงจุดสิ้นสุดของการทดลองตามเวลาขณะที่บัคกี้บอลลูกที่สี่ถูกผลักออกจากสนาม! ทำตามขั้นตอนในเอกสารนี้เพื่อทำ Sense and Sweep Challenge ให้เสร็จสิ้น
เมื่อคุณทำภารกิจ Sense and Sweep Challenge เสร็จแล้วให้เช็คอินกับครูของคุณ ตรวจสอบให้แน่ใจว่าคุณได้บันทึกผลของความท้าทายไว้ในสมุดบันทึกวิศวกรรมของคุณ
สรุปการไตร่ตรอง
ตอนนี้ท่านได้สร้างกลยุทธ์และแข่งขันใน Sense and Sweep Challenge แล้วถึงเวลาทบทวนสิ่งที่ท่านได้เรียนรู้และทำในบทเรียนนี้แล้ว เริ่มหน้าใหม่ในสมุดบันทึกวิศวกรรมของคุณเพื่อเริ่มต้นการไตร่ตรองของคุณ
ให้คะแนนตัวเองว่าเป็นมือใหม่ฝึกหัดหรือผู้เชี่ยวชาญในแต่ละแนวคิดต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ ให้คำอธิบายสั้นๆเกี่ยวกับเหตุผลที่คุณให้คะแนนตัวเองสำหรับแต่ละแนวคิด:
- การเพิ่มเซ็นเซอร์ระยะทางลงใน BaseBot ของคุณและใช้ในโครงการ VEXcode EXP เพื่อตรวจจับบัคกี้บอล
- การสร้างและทำซ้ำในโครงการที่จะทำให้หุ่นยนต์ของคุณตรวจจับและเคลื่อนย้ายบัคกี้บอลออกจากสนาม
- ร่วมมือกับสมาชิกในทีมของฉันเพื่อสร้างโครงการ VEXcode EXP ที่สนับสนุนกลยุทธ์เกมของเรา
ใช้ตารางนี้เพื่อช่วยคุณกำหนดว่าคุณอยู่ในหมวดหมู่ใด
| ผู้เชี่ยวชาญ | ฉันรู้สึกว่าฉันเข้าใจแนวคิดนี้อย่างถ่องแท้และสามารถสอนเรื่องนี้ให้กับคนอื่นได้ |
| เด็กฝึกงาน | ฉันรู้สึกว่าฉันเข้าใจแนวคิดมากพอที่จะแข่งขันในความท้าทาย |
| มือใหม่ | ฉันรู้สึกว่าฉันไม่เข้าใจแนวคิดและไม่รู้ว่าจะทำสิ่งที่ท้าทายให้สำเร็จได้อย่างไร |
ขั้นตอนต่อไปคืออะไร?
ในบทเรียนนี้ท่านได้เรียนรู้เกี่ยวกับเซ็นเซอร์ระยะทางและวิธีที่สามารถใช้กับหุ่นยนต์ในการตรวจจับวัตถุ นอกจากนี้คุณยังได้เรียนรู้วิธีใช้บล็อก [รอจนกว่า] ในโปรเจกต์ที่มีข้อเสนอแนะเกี่ยวกับเซ็นเซอร์ คุณสร้างและทำซ้ำในโครงการ VEXcode EXP ของคุณเพื่อตรวจจับและย้ายบัคกี้บอลออกจากสนามและแข่งขันในการท้าทาย Sense and Sweep
ในบทเรียนถัดไปคุณจะ:
- เรียนรู้เกี่ยวกับออปติคัลเซนเซอร์และวิธีการใช้งานในโครงการ
- เรียนรู้เกี่ยวกับอัลกอริทึมและวิธีใช้อัลกอริทึม
- แข่งขันในการกวาดความท้าทายภาคสนาม
เลือก < กลับไปที่บทเรียน เพื่อกลับไปที่ภาพรวมของบทเรียน
เลือกบทเรียน ถัดไป > เพื่อดำเนินการต่อไปยังบทเรียนที่ 4 และเรียนรู้เกี่ยวกับออปติคัลเซนเซอร์และอัลกอริทึม