
Hoàn thành
Bây giờ bạn đã xây dựng và thử nghiệm một dự án để phát hiện và đẩy Buckyball ra khỏi sân, bạn đã sẵn sàng cho Thử thách Cảm biến và Quét.
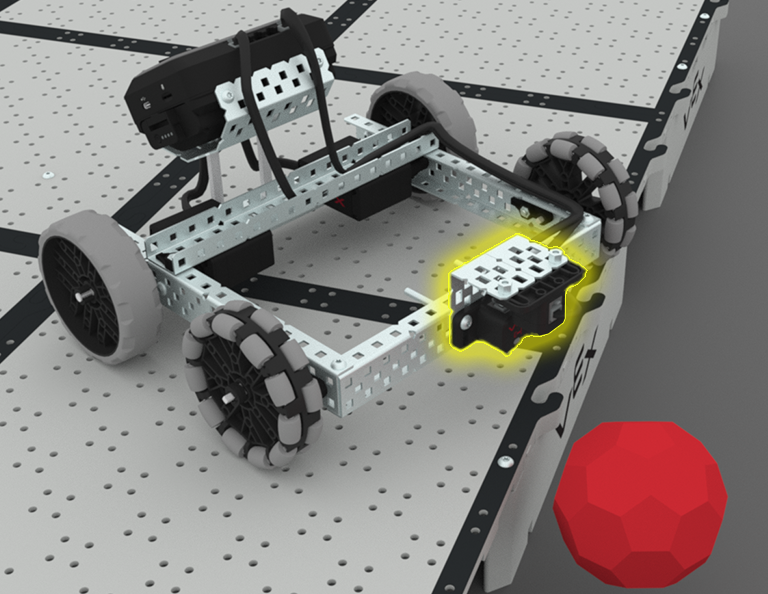
Mục tiêu của thử thách này là đẩy cả bốn quả Buckyball ra khỏi sân trong thời gian nhanh nhất. Hình ảnh động bên dưới cho thấy ví dụ về cách thiết lập Sân và bắt đầu cuộc thi. Bạn sẽ thấy robot phát hiện và đẩy quả Buckyball đầu tiên, sau đó di chuyển để phát hiện quả Buckyball tiếp theo. Sau đó, đoạn phim hoạt hình sẽ hiển thị kết thúc của thử thách tính giờ khi quả Buckyball thứ tư bị đẩy ra khỏi sân! Thực hiện theo các bước trong tài liệu này để hoàn thành Thử thách Nhận biết và Quét.
Sau khi hoàn thành Thử thách Cảm nhận và Quét, hãy liên hệ với giáo viên của bạn. Đảm bảo bạn đã ghi lại kết quả của thử thách vào sổ tay kỹ thuật của mình.
Tóm tắt suy ngẫm
Bây giờ bạn đã tạo ra chiến lược và hoàn thành Thử thách Sense and Sweep, đã đến lúc suy ngẫm về những gì bạn đã học và làm được trong Bài học này. Bắt đầu một trang mới trong sổ tay kỹ thuật của bạn để bắt đầu suy ngẫm.
Hãy đánh giá bản thân là người mới bắt đầu, người học việc hoặc chuyên gia về từng khái niệm sau đây trong sổ tay kỹ thuật của bạn. Hãy giải thích ngắn gọn lý do tại sao bạn tự đánh giá như vậy cho từng khái niệm:
- Thêm cảm biến khoảng cách vào BaseBot của bạn và sử dụng nó trong dự án VEXcode EXP để phát hiện Buckyball
- Xây dựng và lặp lại một dự án để giúp robot của bạn phát hiện và di chuyển Buckyball ra khỏi sân
- Hợp tác với các thành viên trong nhóm của tôi để xây dựng dự án VEXcode EXP hỗ trợ chiến lược trò chơi của chúng tôi
Sử dụng bảng này để giúp bạn xác định mình thuộc nhóm nào.
| Chuyên gia | Tôi cảm thấy mình đã hiểu đầy đủ khái niệm này và có thể dạy lại cho người khác. |
| Người học việc | Tôi cảm thấy mình đã hiểu đủ khái niệm để tham gia thử thách. |
| Người mới bắt đầu | Tôi cảm thấy mình không hiểu khái niệm này và không biết cách hoàn thành thử thách. |
Tiếp theo là gì?
Trong Bài học này, bạn đã tìm hiểu về Cảm biến khoảng cách và cách sử dụng cảm biến này trên robot để phát hiện vật thể. Bạn cũng đã học cách sử dụng khối [Chờ cho đến] trong một dự án có phản hồi cảm biến. Bạn đã xây dựng và lặp lại dự án VEXcode EXP của mình để phát hiện và di chuyển Buckyball ra khỏi sân đấu, đồng thời tham gia thử thách Sense and Sweep.
Trong Bài học tiếp theo, bạn sẽ:
- Tìm hiểu về Cảm biến quang học và cách sử dụng nó trong một dự án
- Tìm hiểu về thuật toán là gì và cách sử dụng nó
- Tham gia Thử thách Quét sạch Sân chơi
Chọn< Quay lại Bài họcđể quay lại Tổng quan về bài học.
ChọnBài học tiếp theo >để tiếp tục Bài học 4 và tìm hiểu về Cảm biến quang học và các thuật toán.