
Soutěžit
Nyní, když jste si vytvořili a otestovali projekt pro detekci a vytlačení Buckyballu z hřiště, jste připraveni na výzvu Sense and Sweep.
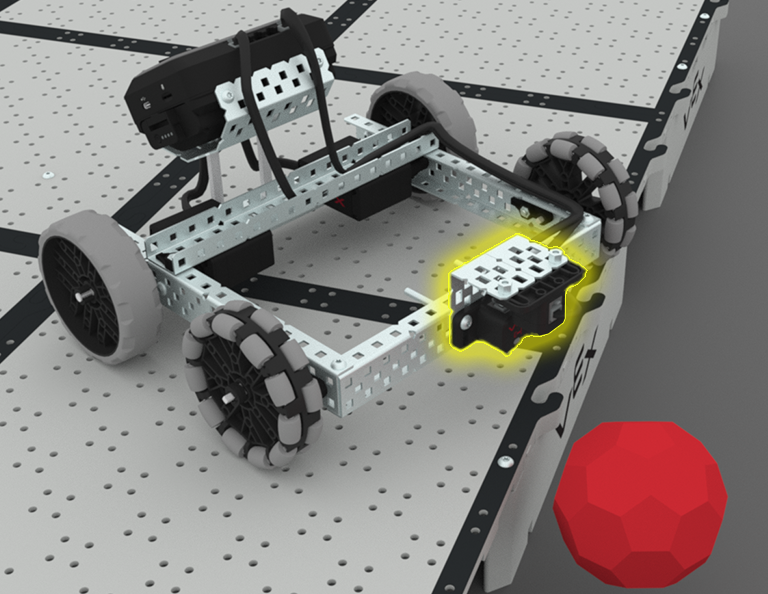
Cílem této výzvy je co nejrychleji vytlačit všechny čtyři Buckybally z hřiště. Níže uvedená animace ukazuje příklad, jak připravit hřiště a zahájit soutěž. Uvidíte, jak robot detekuje a odstrčí první Buckyball a poté se pohne k detekci dalšího Buckyballu. Animace poté ukáže konec časovky, kdy je čtvrtý Buckyball vytlačen z hřiště! Postupujte podle kroků v tomto dokumentu a dokončete výzvu Sense and Sweep.
Jakmile dokončíte výzvu Sense and Sweep, obraťte se na svého učitele. Ujistěte se, že jste si výsledky úkolu zaznamenali do svého technického sešitu.
Závěrečná reflexe
Nyní, když jste si vytvořili strategii a soutěžili v soutěži Sense and Sweep, je čas se zamyslet nad tím, co jste se v této lekci naučili a udělali. Začněte s reflexí na nové stránce svého technického sešitu.
Ve svém technickém sešitě ohodnoťte sebe jako nováčka, učedníka nebo experta v každém z následujících konceptů. Stručně vysvětlete, proč jste si u každého konceptu dali toto hodnocení:
- Přidání senzoru vzdálenosti do vašeho BaseBotu a jeho použití v projektu VEXcode EXP k detekci Buckyballu
- Vytvoření a iterování projektu, aby váš robot detekoval a přesouval Buckybally z hřiště
- Spolupracuji s členy mého týmu na vytvoření projektu VEXcode EXP, který podporuje naši herní strategii.
Použijte tuto tabulku, která vám pomůže určit, do které kategorie spadáte.
| Expert | Mám pocit, že jsem daný koncept plně pochopil a mohl bych ho naučit někoho jiného. |
| Učeň | Mám pocit, že jsem konceptu porozuměl dostatečně na to, abych se v soutěži zhostil/a. |
| Nováček | Mám pocit, že jsem nepochopil koncept a nevím, jak úkol dokončit. |
Co bude dál?
V této lekci jste se dozvěděli o senzoru vzdálenosti a o tom, jak ho lze použít u robota k detekci objektů. Také jste se naučili, jak používat blok [Čekat do] v projektu se zpětnou vazbou ze senzorů. Vytvořili a iterovali jste svůj projekt VEXcode EXP pro detekci a přesun Buckyballů z pole a soutěžili jste v výzvě Sense and Sweep.
V další lekci budete:
- Zjistěte více o optickém senzoru a o tom, jak ho lze použít v projektu
- Zjistěte, co je algoritmus a jak ho lze použít
- Soutěžte ve výzvě Sweep the Field
Vyberte< Zpět k lekcímpro návrat k přehledu lekcí.
VyberteDalší lekce >a pokračujte k lekci 4, kde se dozvíte o optickém senzoru a algoritmech.