
Konkurrieren
Jetzt, da du ein Projekt aufgebaut und getestet hast, um einen Buckyball zu erkennen und vom Feld zu schieben, bist du bereit für die Sense and Sweep Challenge.
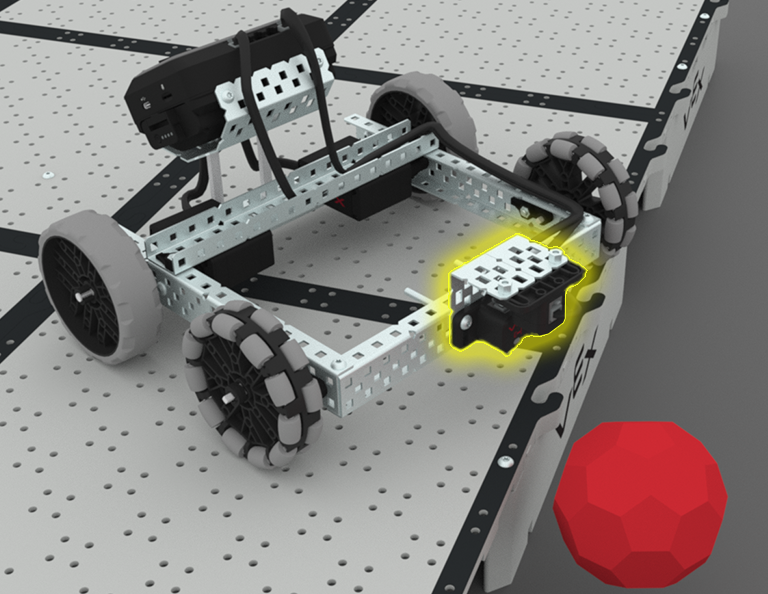
Das Ziel dieser Herausforderung ist es, alle vier Buckyballs in der schnellsten Zeit vom Feld zu schieben. Die folgende Animation zeigt ein Beispiel, wie Sie das Feld einrichten und den Wettbewerb starten. Sie werden sehen, wie der Roboter den ersten Buckyball erkennt und abschiebt. Bewegen Sie sich dann, um den nächsten Buckyball zu erkennen. Die Animation zeigt dann das Ende der zeitgesteuerten Testphase, wenn der vierte Buckyball vom Feld geschoben wird! Befolgen Sie die Schritte in diesem Dokument, um die Sense and Sweep Challenge abzuschließen.
Sobald du die Sense and Sweep-Herausforderung abgeschlossen hast, melde dich bei deinem Lehrer. Stellen Sie sicher, dass Sie die Ergebnisse der Herausforderung in Ihrem technischen Notizbuch dokumentiert haben.
Zusammenfassung Reflexion
Nachdem Sie nun eine Strategie erstellt und an der Sense and Sweep Challenge teilgenommen haben, ist es an der Zeit, darüber nachzudenken, was Sie in dieser Lektion gelernt und getan haben. Beginnen Sie eine neue Seite in Ihrem technischen Notizbuch, um mit der Reflexion zu beginnen.
Bewerten Sie sich als Anfänger, Auszubildender oder Experte für jedes der folgenden Konzepte in Ihrem technischen Notizbuch. Geben Sie eine kurze Erklärung, warum Sie sich diese Bewertung für jedes Konzept gegeben haben:
- Hinzufügen des Abstandssensors zu Ihrem BaseBot und Verwendung in einem VEXcode EXP-PROJEKT zur Erkennung eines Buckyballs
- Aufbau und Iteration eines Projekts, damit Ihr Roboter Buckyballs erkennt und vom Feld entfernt
- Zusammenarbeit mit meinen Teammitgliedern beim Aufbau eines VEXcode EXP-PROJEKTS, das unsere Spielstrategie unterstützt
Verwenden Sie diese Tabelle, um festzustellen, unter welche Kategorie Sie fallen.
| Experte | Ich habe das Gefühl, dass ich das Konzept vollständig verstanden habe und dies jemand anderem beibringen könnte. |
| Auszubildender | Ich habe das Gefühl, dass ich das Konzept genug verstanden habe, um an der Herausforderung teilzunehmen. |
| Einsteiger | Ich habe das Gefühl, dass ich das Konzept nicht verstanden habe und nicht weiß, wie ich die Herausforderung meistern soll. |
Wie geht es weiter?
In dieser Lektion haben Sie den Abstandssensor kennengelernt und erfahren, wie er an einem Roboter verwendet werden kann, um Objekte zu erkennen. Sie haben auch gelernt, wie man einen [Warten bis] -Block in einem Projekt mit Sensor-Feedback verwendet. Du hast dein VEXcode EXP-Projekt aufgebaut und iteriert, um Buckyballs zu erkennen und vom Feld zu bewegen, und hast an der Sense and Sweep-Herausforderung teilgenommen.
In der nächsten Lektion wirst du:
- Erfahren Sie mehr über den optischen Sensor und wie er in einem Projekt verwendet werden kann
- Erfahren Sie, was ein Algorithmus ist und wie er verwendet werden kann
- Nimm an der Sweep-the-Field-Herausforderung teil
Wählen Sie < Zurück zu Lektionen, um zur Lektionsübersicht zurückzukehren.
Wählen Sie Nächste Lektion > , um mit Lektion 4 fortzufahren und mehr über den optischen Sensor und die Algorithmen zu erfahren.