
Competir
Ahora que ha construido y probado un proyecto para detectar y empujar una Buckyball fuera del campo, está listo para el Sense and Sweep Challenge.
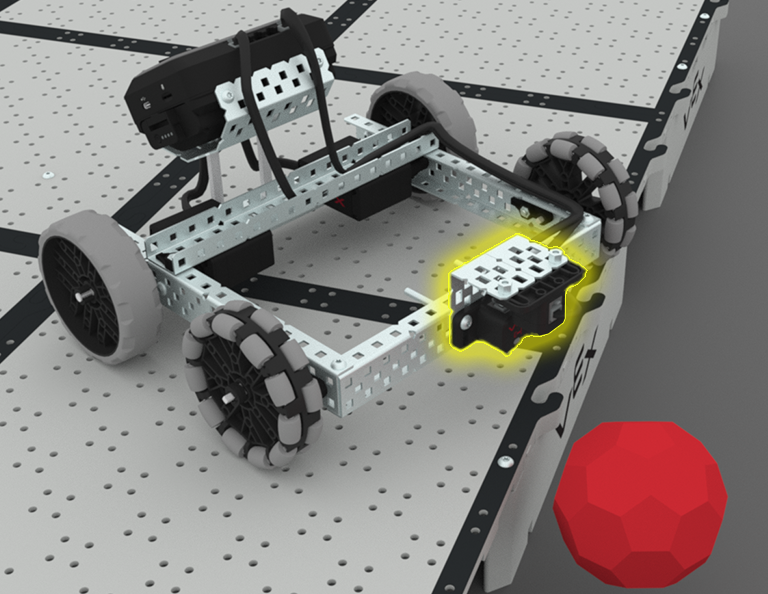
El objetivo de este desafío es sacar las cuatro Buckyballs del campo en el menor tiempo posible. La siguiente animación muestra un ejemplo de cómo configurar el campo y comenzar la competencia. Verá que el robot detecta y empuja la primera Buckyball, luego se mueve para detectar la siguiente Buckyball. ¡La animación mostrará el final de la prueba cronometrada cuando la cuarta Buckyball salga del campo! Siga los pasos de este documento para completar el Sense and Sweep Challenge.
Una vez que haya completado el Sense and Sweep Challenge, consulte con su maestro. Asegúrese de haber documentado los resultados del desafío en su cuaderno de ingeniería.
Reflexión de recapitulación
Ahora que ha creado una estrategia y ha competido en el Sense and Sweep Challenge, es hora de reflexionar sobre lo que ha aprendido y hecho en esta lección. Comience una nueva página en su cuaderno de ingeniería para comenzar su reflexión.
Califíquese como novato, aprendiz o experto en cada uno de los siguientes conceptos en su cuaderno de ingeniería. Proporcione una breve explicación de por qué se dio esa calificación para cada concepto:
- Añadir el sensor de distancia a su BaseBot y usarlo en un proyecto VEXCODE EXP para detectar una Buckyball
- Construir e iterar en un proyecto para hacer que su robot detecte y mueva las Buckyballs fuera del campo
- Colaborar con los miembros de mi equipo para crear un proyecto VEXCODE EXP que respalde nuestra estrategia de juego
Utiliza esta tabla para ayudarte a determinar en qué categoría te encuentras.
| Experto | Siento que entendí completamente el concepto y podría enseñárselo a otra persona. |
| Aprendiz | Siento que entendí el concepto lo suficiente como para competir en el desafío. |
| Novato | Siento que no entendí el concepto y no sé cómo completar el desafío. |
¿Cuál es el siguiente paso?
En esta lección, aprendiste sobre el sensor de distancia y cómo se puede usar en un robot para detectar objetos. También aprendiste a usar un bloque [Esperar hasta] en un proyecto con comentarios de sensores. Construyó e iteró en su proyecto VEXcode EXP para detectar y mover Buckyballs fuera del campo, y compitió en el desafío Sense and Sweep.
En la próxima lección, usted:
- Conozca el sensor óptico y cómo se puede utilizar en un proyecto
- Aprende qué es un algoritmo y cómo se puede usar
- Compite en el desafío de barrer el campo
Seleccione < Volver a las lecciones para volver a la descripción general de la lección.
Seleccione Siguiente lección > para continuar con la Lección 4 y aprender sobre el sensor óptico y los algoritmos.