
Competir
Agora que você construiu e testou um projeto para detectar e empurrar uma Buckyball para fora do campo, está pronto para o Desafio de Sentir e Varrer.
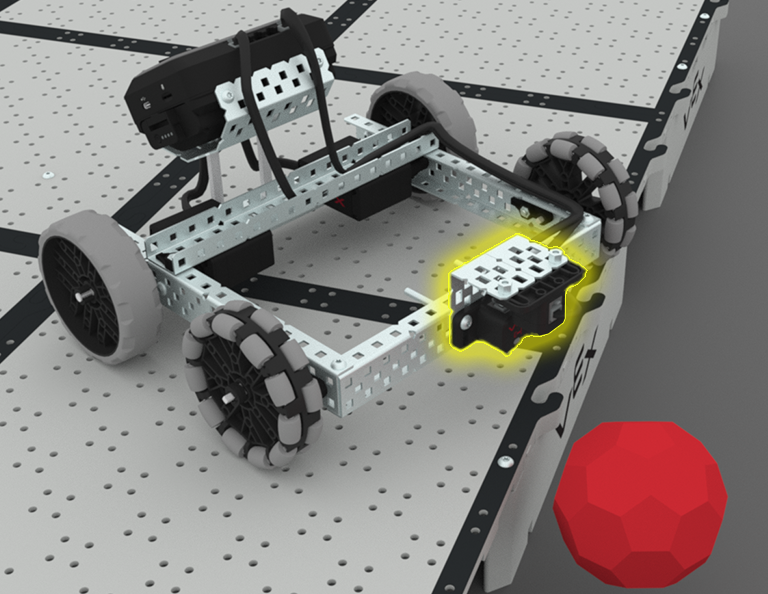
O objetivo deste desafio é empurrar todas as quatro Buckyballs para fora do campo no tempo mais rápido. A animação abaixo mostra um exemplo de como configurar o Campo e começar a competição. Você verá o robô detectar e empurrar a primeira Buckyball e, em seguida, mover-se para detectar a próxima Buckyball. A animação mostrará o final do teste cronometrado quando o quarto Buckyball for empurrado para fora do campo! Siga as etapas deste documento para concluir o Desafio de Sentir e Varrer.
Depois de concluir o Desafio de Sentir e Varrer, fale com o seu professor. Certifique-se de ter documentado os resultados do desafio em seu caderno de engenharia.
Reflexão de Encerramento
Agora que você criou uma estratégia e competiu no Desafio Sentir e Varrer, é hora de refletir sobre o que aprendeu e fez nesta Lição. Inicie uma nova página no seu caderno de engenharia para começar a sua reflexão.
Avalie-se como novato, aprendiz ou especialista em cada um dos seguintes conceitos em seu caderno de engenharia. Forneça uma breve explicação do motivo pelo qual você se deu essa classificação para cada conceito:
- Adicionar o Sensor de Distância ao seu BaseBot e usá-lo num projeto EXP VEXcode para detetar uma Buckyball
- Construir e iterar um projeto para fazer com que o seu robô detecte e mova Buckyballs para fora do campo
- Colaborar com os membros da minha equipa para criar um projeto EXP VEXCODE que apoie a nossa estratégia de jogo
Use esta tabela para ajudá-lo a determinar em qual categoria você se enquadra.
| Especialista | Sinto que entendi completamente o conceito e poderia ensinar isso a outra pessoa. |
| Aprendiz | Sinto que entendi o conceito o suficiente para competir no desafio. |
| Iniciante | Sinto que não entendi o conceito e não sei como completar o desafio. |
O que vem a seguir?
Nesta Lição, você aprendeu sobre o Sensor de Distância e como ele pode ser usado num robô para detectar objetos. Também aprendemos a usar um bloco [Wait until] num projeto com feedback do sensor. Você construiu e iterou seu projeto EXP VEXcode para detectar e mover Buckyballs para fora do campo e competiu no desafio Sentir e Varrer.
Na próxima lição, você irá:
- Saiba mais sobre o Sensor Óptico e como ele pode ser usado num projeto
- Saiba o que é um algoritmo e como ele pode ser usado
- Competir no Sweep the Field Challenge
Selecione < Retornar às Aulas para voltar à Visão Geral da Aula.
Selecione Próxima lição > para continuar para a lição 4 e aprender sobre o sensor óptico e os algoritmos.