
경쟁하다
이제 버키볼을 감지하고 필드 밖으로 밀어내는 프로젝트를 만들고 테스트했으므로 감지 및 청소 챌린지에 참여할 준비가 되었습니다.
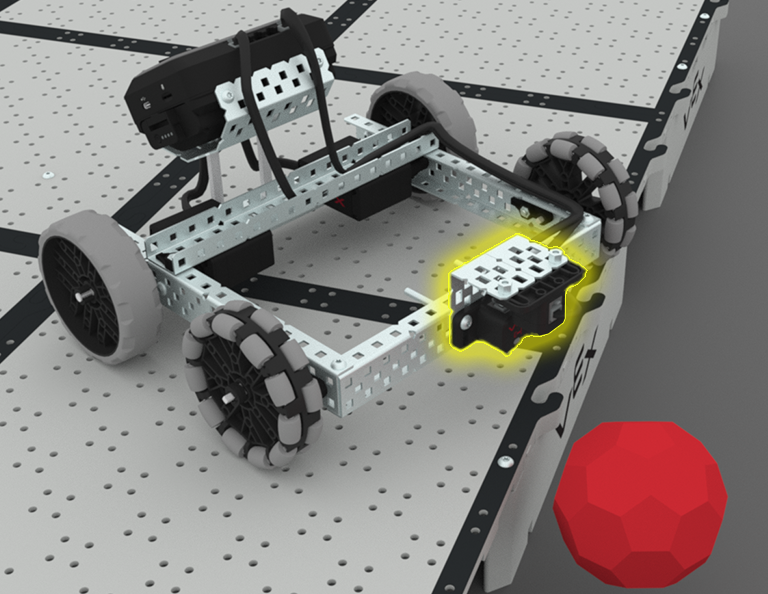
이 챌린지의 목표는 가장 빠른 시간 안에 버키볼 4개를 모두 필드 밖으로 밀어내는 것입니다. 아래 애니메이션은 필드를 설정하고 경쟁을 시작하는 방법의 예를 보여줍니다. 로봇이 첫 번째 버키볼을 감지하고 밀어낸 다음, 다음 버키볼을 감지하기 위해 움직이는 것을 보실 수 있습니다. 애니메이션은 네 번째 버키볼이 필드 밖으로 밀려나면서 시간 제한 시험이 끝나는 모습을 보여줍니다! 이 문서의 단계에 따라 Sense and Sweep 챌린지를 완료하세요.
감각과 쓸기 챌린지를 완료한 후, 선생님께 확인하세요. 엔지니어링 노트북에 과제 결과를 기록해 두세요.
마무리 반성
이제 전략을 수립하고 Sense and Sweep 챌린지에 참여했으니, 이 수업에서 배운 내용과 수행한 내용을 되돌아볼 시간입니다. 엔지니어링 노트에 새 페이지를 열어 성찰을 시작해 보세요.
엔지니어링 노트에 다음 개념 각각에 대해 초보자, 견습생, 전문가로 평가해 보세요. 각 개념에 대해 해당 평가를 내린 이유를 간략하게 설명해 주세요.
- BaseBot에 거리 센서를 추가하고 VEXcode EXP 프로젝트에서 이를 사용하여 Buckyball 감지
- 로봇이 Buckyball을 감지하고 필드 밖으로 옮기도록 프로젝트를 구축하고 반복합니다.
- 게임 전략을 지원하는 VEXcode EXP 프로젝트를 구축하기 위해 팀원들과 협업합니다.
이 표를 사용하여 자신이 어느 범주에 속하는지 판단해 보세요.
| 전문가 | 저는 그 개념을 완전히 이해했고 다른 사람에게도 가르칠 수 있을 것 같습니다. |
| 도제 | 저는 이 도전에 참가하기에 충분히 개념을 이해했다고 생각합니다. |
| 초심자 | 저는 그 개념을 이해하지 못했고, 어떻게 도전과제를 완수해야 할지 모르겠습니다. |
다음은 무엇인가?
이번 수업에서는 거리 센서에 대해 알아보고 로봇에서 물체를 감지하는 데 거리 센서를 어떻게 사용할 수 있는지 알아보았습니다. 또한 센서 피드백이 있는 프로젝트에서 [대기까지] 블록을 사용하는 방법도 알아보았습니다. 여러분은 VEXcode EXP 프로젝트를 구축하고 반복하여 버키볼을 감지하고 필드 밖으로 옮기는 작업을 했으며, 감지 및 쓸기 챌린지에서 경쟁했습니다.
다음 수업에서는 다음을 학습합니다.
- 광학 센서에 대해 알아보고 프로젝트에서 어떻게 사용할 수 있는지 알아보세요.
- 알고리즘이 무엇이고 어떻게 사용할 수 있는지 알아보세요
- Sweep the Field Challenge에 참여하세요
< 수업 개요로 돌아가려면 수업로 돌아가기를 선택하세요.
다음 레슨 >선택하여 레슨 4로 넘어가서 광학 센서와 알고리즘에 대해 알아보세요.