
![]() กล่องเครื่องมือครู
-
วัตถุประสงค์ของกิจกรรมนี้
กล่องเครื่องมือครู
-
วัตถุประสงค์ของกิจกรรมนี้
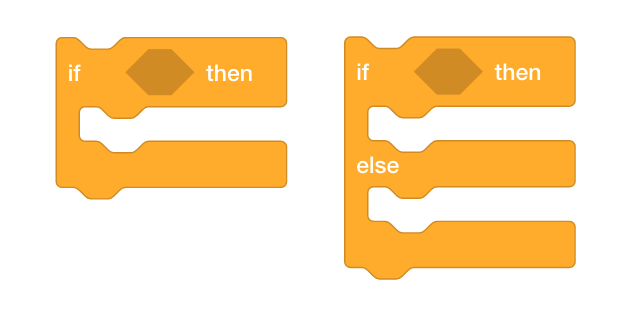
การเขียนโปรแกรมด้วยเงื่อนไขสามารถทำได้โดยใช้ บล็อก [If then] หรือ [If then else] ภายในโครงการ กิจกรรมนี้จะแนะนำให้นักเรียนรู้จักกับการใช้บล็อค [If then] เพื่อให้หุ่นยนต์ขับเคลื่อนไปข้างหน้าเว้นแต่จะกดหน้าจอ ส่วนหลังของกิจกรรมขอให้พวกเขาปรับแต่งโครงการโดยใช้บล็อค [ถ้าเป็นเช่นนั้น ] แทนบล็อค [ถ้าเป็นเช่น นั้น]
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับ [If then] และ [If then else] บล็อกหรืออื่นๆที่ใช้ในกิจกรรมนี้โปรดไปที่ข้อมูลความช่วยเหลือภายใน VEXcode V5 สำหรับข้อมูลเพิ่มเติมเกี่ยวกับเครื่องมือช่วยเหลือในตัวนี้คลิก ที่นี่
ต่อไปนี้เป็นโครงร่างของสิ่งที่นักเรียนของท่านจะทำในกิจกรรมนี้:
- ดูวิดีโอ บทช่วยสอน If Then Else Blocks แล้วใช้เทมเพลต Clawbot (Drivetrain 2 - motor, No Gyro) เพื่อสร้าง โปรเจกต์การ สร้างปุ่มหยุดที่แสดงและคาดการณ์สิ่งที่โปรเจกต์ทำ
- ปรับแต่งโปรเจกต์ตัวอย่าง การ สร้างปุ่มหยุดโดยใช้บล็อค [ถ้าเป็นอย่างนั้น] ด้วยการตั้งค่าพฤติกรรม "อย่างอื่น" เพื่อขับเคลื่อนไปข้างหน้า
- ขยายการเรียนรู้ของคุณ: การเพิ่มปุ่มบนหน้าจอสมองที่กดเพื่อหยุดการขับขี่ของหุ่นยนต์
| จำนวน | วัสดุที่จำเป็น |
|---|---|
| 1 |
ชุดเริ่มต้นห้องเรียน VEX V5 (พร้อมเฟิร์มแวร์ล่าสุด) |
| 1 |
VEXcode V5 (เวอร์ชันล่าสุด, Windows, macOS, Chromebook) |
| 1 |
สมุดบันทึกวิศวกรรม |
| 1 |
เทมเพลต Clawbot (Drivetrain 2 - motor, No Gyro) |
Clawbot พร้อมที่จะตัดสินใจแล้ว! กิจกรรม
นี้จะให้เครื่องมือในการเขียนโปรแกรมหุ่นยนต์ของคุณด้วยพฤติกรรมที่มีเงื่อนไข บล็อก [ถ้า
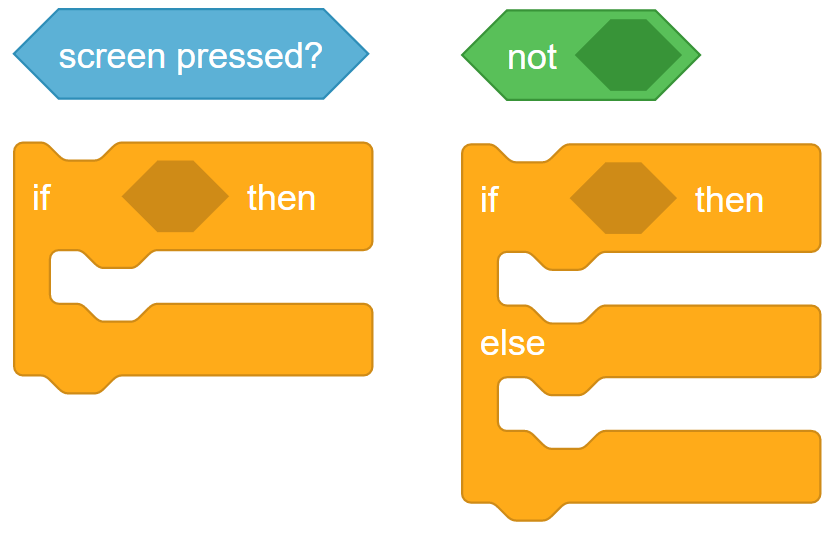
เป็นเช่นนั้น] และ [ถ้าเป็นเช่นนั้น] เป็นจุดสนใจหลักภายในกิจกรรมแต่ก็มีการใช้บล็อกผู้ปฏิบัติงานและการตรวจจับด้วยเช่นกัน
คุณสามารถใช้ข้อมูลความช่วยเหลือภายใน VEXcode V5 เพื่อเรียนรู้เกี่ยวกับบล็อก สำหรับคำแนะนำในการใช้คุณลักษณะความช่วยเหลือโปรดดูบทแนะนำการใช้ความช่วยเหลือ

![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
หากนี่เป็นครั้งแรกที่นักเรียนใช้ VEXcode V5 พวกเขายังสามารถดูบทแนะนำในแถบเครื่องมือเพื่อเรียนรู้ทักษะพื้นฐานอื่นๆ

ขั้นตอนที่ 1: มาเริ่มต้นด้วยความเข้าใจเกี่ยวกับข้อความที่มีเงื่อนไข
ก่อนที่คุณจะเริ่มเขียนโปรแกรมด้วยเงื่อนไขก่อนอื่นให้ดูวิดีโอแนะนำ If-Then-Else ด้านล่าง นอกจากนี้ยังสามารถพบได้ในวิดีโอการสอนใน VEXcode V5
ขั้นตอนที่ 2: มาเริ่มเขียนโปรแกรมด้วยข้อความที่มีเงื่อนไข
เปิดโปรเจกต์ตัวอย่างเทมเพลต Clawbot (Drivetrain 2 - motor, No Gyro)

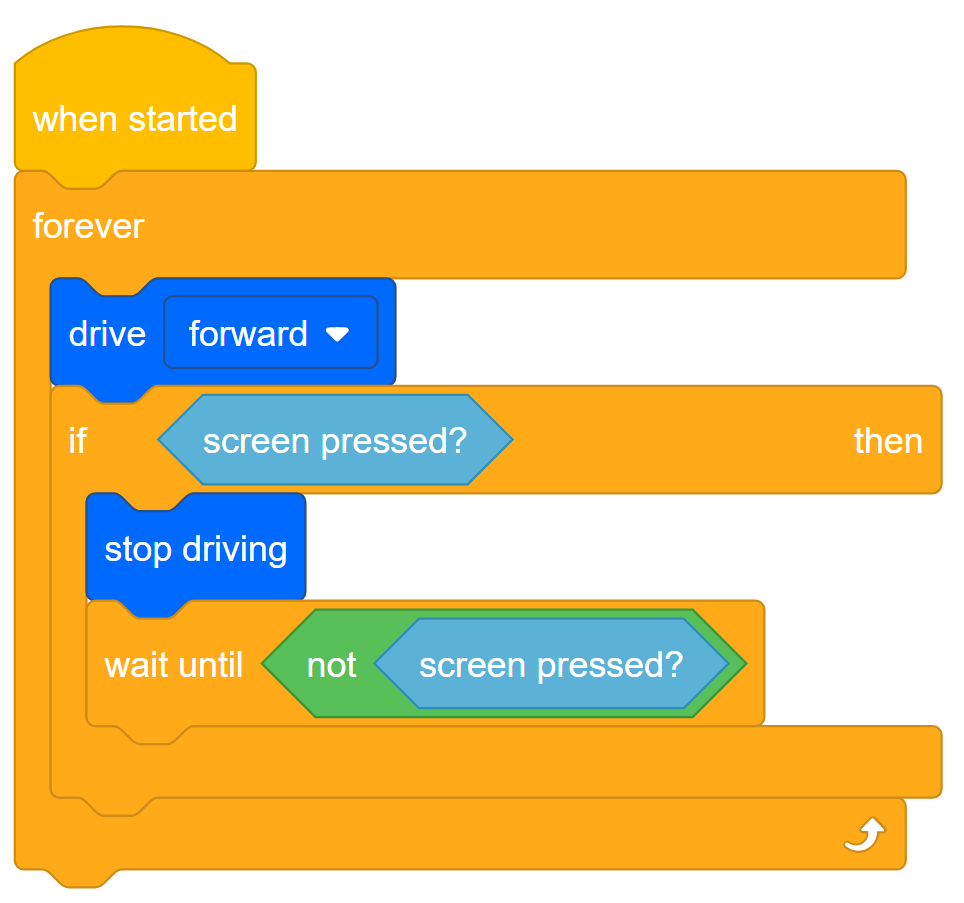
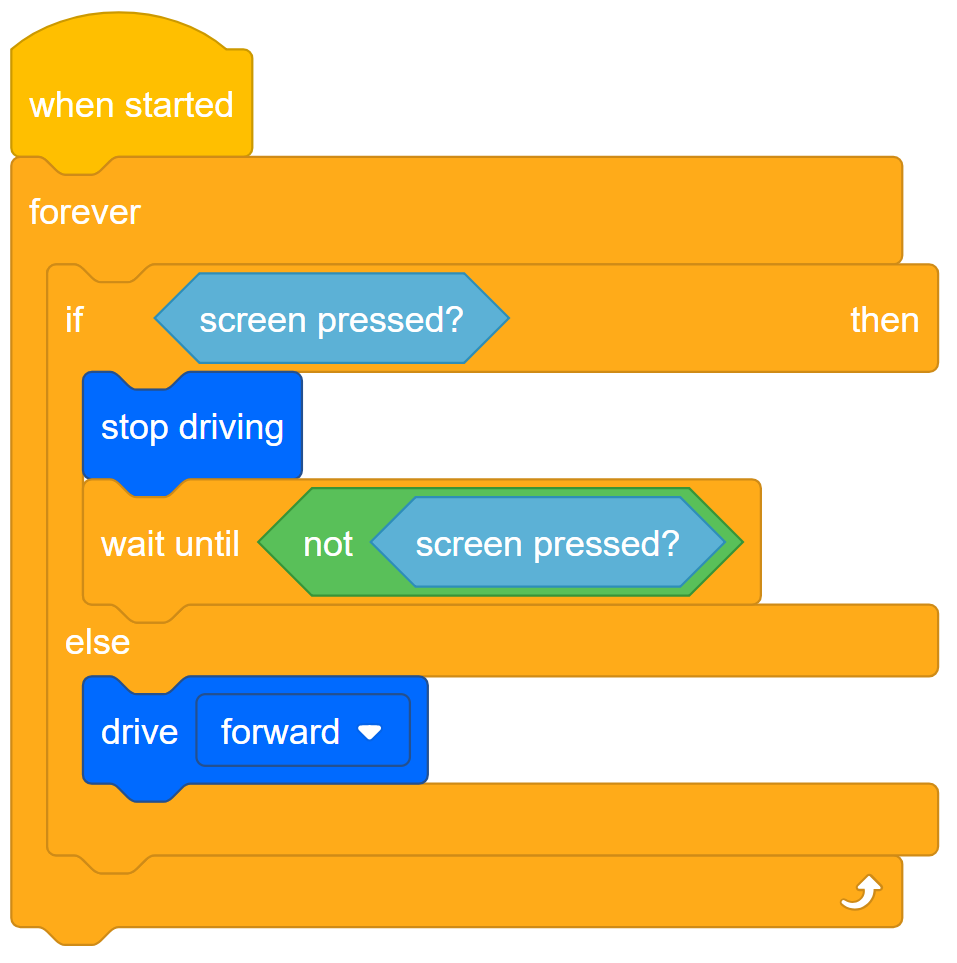
สร้างโปรเจกต์ด้านล่าง
ทำสิ่งต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ:
- อธิบายว่าโปรเจกต์นี้มี Clawbot ทำอะไร คุณจะต้องอธิบายมากกว่าความจริงที่ว่ามันสร้างปุ่มหยุด อธิบายว่าบล็อกใดที่ทำให้ Clawbot ทำอะไรได้บ้าง
- เขียนสรุปหนึ่งประโยคที่ตรงกับสิ่งที่โปรเจกต์ทำ

- ทดสอบเพื่อดูว่าการคาดการณ์ของคุณเกี่ยวกับสิ่งที่โครงการมี Clawbot ทำนั้นถูกต้องหรือไม่
- บันทึกและดาวน์โหลดโปรเจกต์เป็น การสร้างปุ่มหยุด ไปยังช่อง 1 บน Clawbot จากนั้นเรียกใช้
- สำหรับความช่วยเหลือในการดาวน์โหลดโครงการโปรดดูบทแนะนำใน VEXcode V5 ที่อธิบายวิธีการ ดาวน์โหลดและเรียกใช้โครงการ
- ตรวจสอบคำอธิบายของคุณเกี่ยวกับโครงการและเพิ่มบันทึกเพื่อแก้ไขตามความจำเป็น
![]() กล่องเครื่องมือครู
-
คำตอบ
กล่องเครื่องมือครู
-
คำตอบ
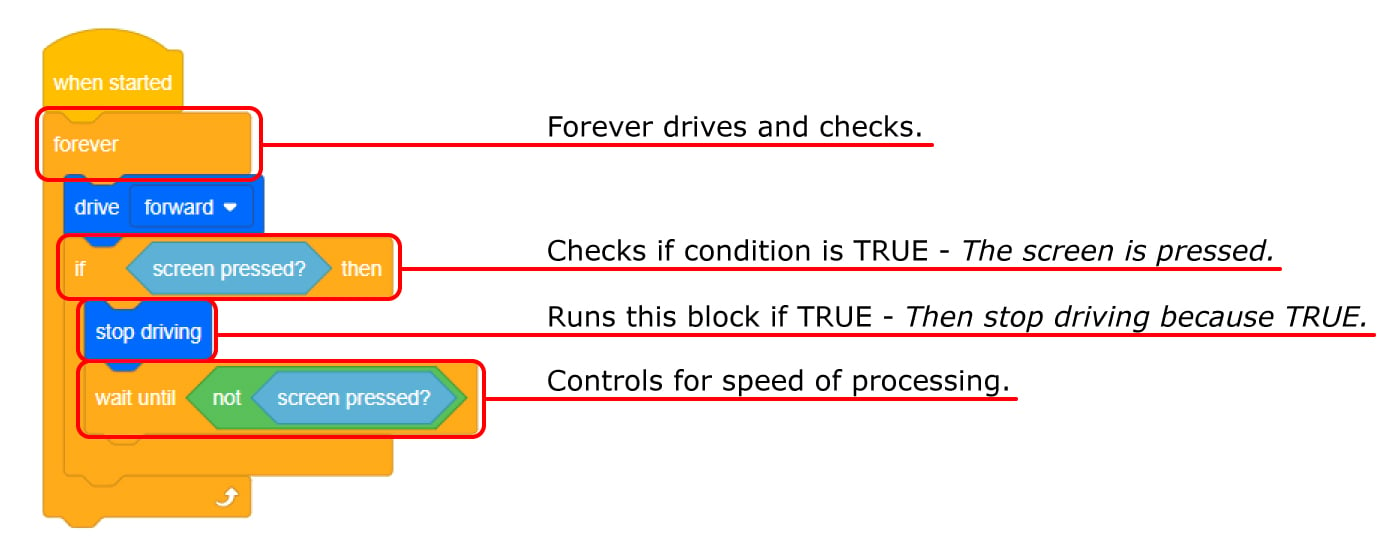
- โปรเจกต์นี้ให้หุ่นยนต์ขับเคลื่อนไปข้างหน้าอย่างต่อเนื่องแต่จะหยุดหากมีการกดหน้าจอ โดยใช้ บล็อก [Forever] เพื่อขับเคลื่อนและตรวจสอบอย่างต่อเนื่อง หากหน้าจอกำลังถูกกด (จริง) Clawbot จะหยุดการขับขี่
นักเรียนไม่ได้คาดหวังว่าจะเข้าใจว่าเหตุใดจึงใช้บล็อค [รอ จนกว่าจะถึง] อธิบายว่าบล็อก [รอจนกว่า] มีความจำเป็นเนื่องจากความเร็วของการไหลของโปรแกรมของหุ่นยนต์ ถ้ามันไม่ได้อยู่ที่นั่นมอเตอร์ของ Clawbot จะทำงานราวกับว่าผู้ใช้กำลังกดหน้าจอซ้ำแล้วซ้ำอีกขณะที่มันวนลูปผ่านโครงการ แต่ บล็อก [รอจนกว่า] จะหยุดการทำงานของโปรแกรมและไม่ได้ให้โปรเจกต์เริ่ม วนซ้ำ [ตลอดไป] อีกจนกว่าผู้ใช้จะหยุดการกดหน้าจอ - บรรทัดของซูโดโค้ดอาจง่ายเหมือน: ขับไปข้างหน้าจนกว่าจะกดหน้าจอ
สมุดบันทึกวิศวกรรมของนักศึกษาสามารถได้รับการดูแลและให้คะแนน เป็น ราย บุคคล (Google Doc /.docx /.pdf) หรือเป็น ทีม ( Google Doc /.docx/.pdf) ลิงก์ก่อนหน้านี้ให้รูบริกที่แตกต่างกันสำหรับแต่ละวิธี เมื่อใดก็ตามที่มีรูบริกรวมอยู่ในการวางแผนการศึกษาเป็นแนวปฏิบัติที่ดีในการอธิบายรูบริกหรืออย่างน้อยก็ให้สำเนาแก่นักเรียนก่อนที่กิจกรรมจะเริ่มต้น
ขั้นตอนที่ 3: ทำความเข้าใจเกี่ยวกับการรอจนกว่าจะบล็อค
สังเกตว่าหากหน้าจอของสมองถูกกดการไหลของโครงการจะเคลื่อนไปอย่างรวดเร็วจนโครงการจะย้ายไปยังบล็อกถัดไปซึ่งก็คือบล็อก [หยุดขับรถ]
ดังนั้นโครงการจึงต้องการ บล็อก [รอจนกว่า] ที่บอกให้หุ่นยนต์หยุดทำงานจนกว่าหน้าจอของสมองจะถูกปล่อยออกมา มิฉะนั้น บล็อก [Forever] จะทำให้โครงการเริ่มต้นอีกครั้งด้วย บล็อก [Drive]
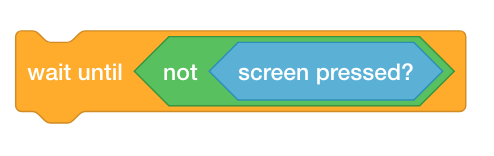
บล็อก [รอจนกว่า] เป็นสิ่งจำเป็นเนื่องจากความเร็วของการไหลของโครงการ หากไม่อยู่ที่นั่นโครงการจะย้ายไปยังบล็อกถัดไปก่อนที่หุ่นยนต์จะมีเวลาตอบสนอง
ขั้นตอนที่ 4: เปลี่ยนโปรเจกต์
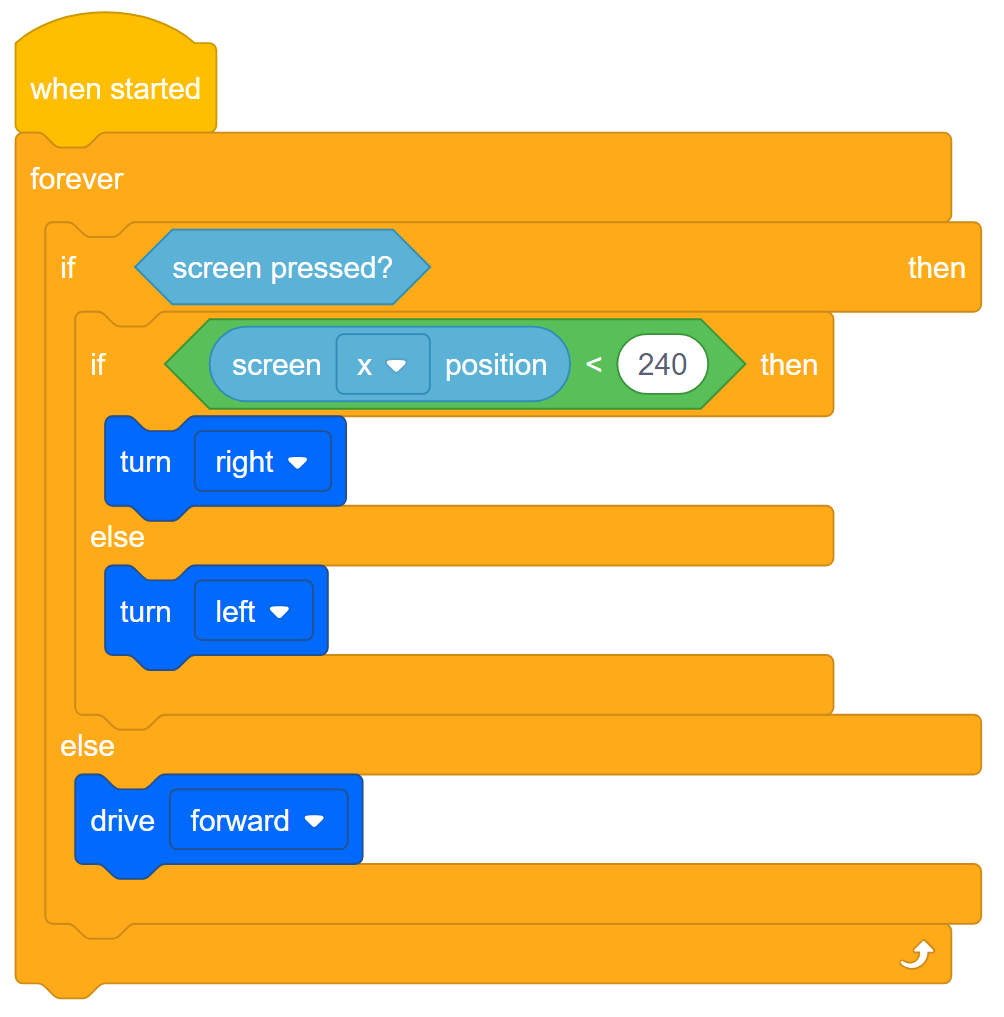
ขั้นตอนต่อไปคือการเปลี่ยนบล็อค [If then] เป็นบล็อค [If then else]

- เริ่มต้นด้วย การบันทึกการสร้างปุ่มหยุด เป็นโปรเจ กต์ใหม่ StopOrDrive
- หากคุณต้องการความช่วยเหลือในการบันทึกโครงการโปรดดูบทช่วยสอนการตั้งชื่อและการบันทึกโครงการของคุณใน VEXcode V5
- จากนั้นสร้าง โครงการ StopOrDrive ที่แสดงด้านล่าง
- ดาวน์โหล ด StopOrDrive ไปยังช่อง 2 บน Clawbot ของคุณ
- สำหรับความช่วยเหลือในการดาวน์โหลดโครงการโปรดดูบทแนะนำใน VEXcode V5 ที่อธิบายวิธีการ ดาวน์โหลดและเรียกใช้โครงการ
- ทดสอบ การสร้างปุ่มหยุด (ช่อง 1) แล้วทดสอบ StopOrDrive (ช่อง 2) และเปรียบเทียบเพื่อดูว่ามีความแตกต่างในพฤติกรรมของหุ่นยนต์หรือไม่ สังเกตความแตกต่างในสมุดบันทึกวิศวกรรมของคุณ
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
คำแนะนำนำนักเรียนไปยังวิดีโอสอนภายใน VEXcode V5 ตามความจำเป็นสำหรับการบันทึกและดาวน์โหลดโครงการ สำหรับความช่วยเหลือเพิ่มเติมโปรดดูที่ ฐานความรู้หุ่นยนต์ vex สำหรับบทความความช่วยเหลือเพิ่มเติม
![]() กล่องเครื่องมือครู
-
คำตอบ
กล่องเครื่องมือครู
-
คำตอบ
ในส่วนของพฤติกรรมของหุ่นยนต์ ไม่ ควรมีความแตกต่างระหว่าง การสร้างปุ่มหยุด และ โครงการ StopOrDrive
ทั้งสองโปรเจกต์มีพฤติกรรมเหมือนกัน ความแตกต่างเพียงอย่างเดียวคือการใช้ บล็อก [If then else] ใน โครงการ StopOrDrive
การใช้บล็อค [If then else] จะ ช่วยให้คุณสามารถเพิ่มปุ่มเพิ่มเติมลงในหน้าจอในกิจกรรมที่กำลังจะเกิดขึ้นได้
![]() ขยายการเรียนรู้ของท่าน
ขยายการเรียนรู้ของท่าน
เมื่อห้องปฏิบัติการ STEM นี้ดำเนินการนักเรียนจะพัฒนาโครงการที่อนุญาตให้หน้าจอของ Clawbot ทำหน้าที่เป็นส่วนติดต่อผู้ใช้ เพื่อเตรียมความพร้อมท้าทายให้นักเรียนคิดหาวิธีวาดสี่เหลี่ยมผืนผ้าสีบนหน้าจอที่ทำหน้าที่เหมือนปุ่ม เนื่องจากการกดที่ใดก็ได้บนหน้าจอในขณะนี้เป็นเงื่อนไขปุ่มควรใช้เวลาทั้งหน้าจอ นักเรียนควรให้โครงการถ่ายทอดเหตุการณ์เพื่อวาดปุ่มเมื่อเริ่มต้น
ให้นักเรียนใช้คุณลักษณะความช่วยเหลือใน VEXcode V5 สำหรับข้อมูลเกี่ยวกับบล็อกกิจกรรมและรูปลักษณ์ แนะนำให้นักเรียนเรียนรู้วิธีจัดหน้าจอของสมองให้เป็นระบบพิกัดในข้อมูลของ บล็อก [วาดสี่เหลี่ยมผืนผ้า] ก่อน พวกเขาจะต้องเข้าใจสิ่งนี้เพื่อตั้งค่าพารามิเตอร์ภายในบล็อกนั้น พิกัดที่ใช้สอดคล้องกับจำนวนพิกเซลไม่ใช่จำนวนคอลัมน์หรือแถว นี่คือเลย์เอาต์ของหน้าจอ:
นักเรียนควรวางแผนทดสอบและปรับแต่งการเปลี่ยนแปลงเหล่านี้ในโครงการขณะที่บันทึกไว้ในสมุดบันทึกทางวิศวกรรม สำหรับโน้ตบุ๊ควิศวกรรมแต่ละตัวให้ คลิกหนึ่งในลิงก์เหล่านี้ ( Google Doc /.docx /.pdf) หรือคลิกหนึ่งในลิงก์ต่อไปนี้สำหรับโน้ตบุ๊คทีม ( Google Doc /.docx /.pdf)
นี่คือตัวอย่างวิธีแก้ปัญหา:
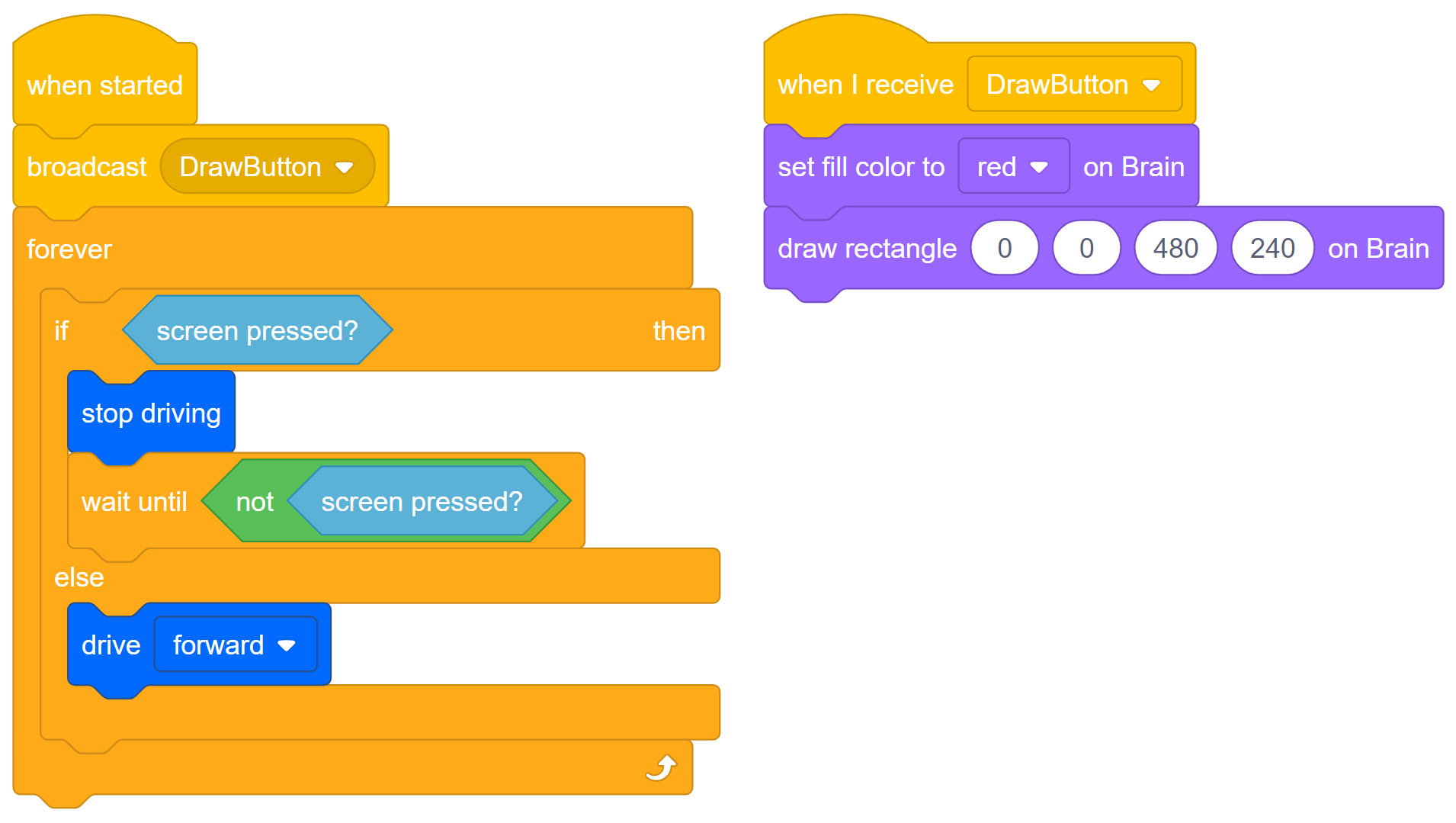
ดังที่คุณเห็นปุ่มจะถูกวาดขึ้นเพื่อให้หน้าจอทั้งหมดเริ่มต้นที่ (0, 0) จุดเริ่มต้นและเติมทั้งหมด 480 พิกเซลในแนวนอน (แกน x) และ 240 พิกเซลในแนวตั้ง (แกน y)