
![]() Caja de herramientas para maestros
: el propósito de esta actividad
Caja de herramientas para maestros
: el propósito de esta actividad
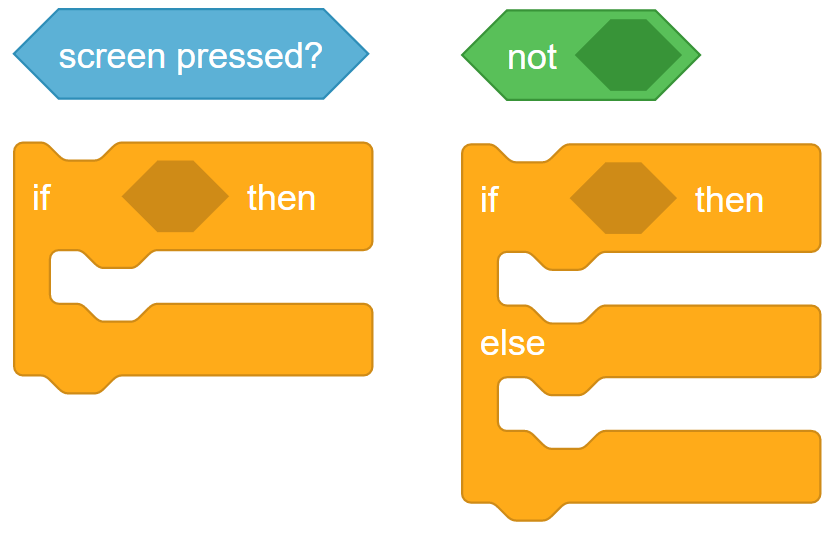
La programación con condicionales se puede realizar utilizando un bloque [If then] o [If then else] dentro de un proyecto. Esta actividad presentará a los estudiantes el uso de un bloque [If then] para que el robot avance a menos que se presione la pantalla. La última parte de la actividad les pide que refinen el proyecto utilizando un bloque [If then else] en lugar del bloque [If then ].

Para obtener más información sobre los bloques [If then] y [If then else] u otros utilizados en esta actividad, visite la información de ayuda dentro de VEXcode V5. Para obtener más información sobre esta herramienta de ayuda integrada, haga clic aquí.
El siguiente es un resumen de lo que sus estudiantes harán en esta actividad:
- Vea el video tutorial If Then Else Blocks y luego use la plantilla Clawbot (Drivetrain 2-motor, No Gyro) para crear el proyecto Creating a Stop Button que se muestra y predecir lo que hace el proyecto.
- Refine el proyecto de ejemplo Crear un botón de parada utilizando un bloque [If then else] con el comportamiento "else" configurado para avanzar.
- Amplíe su aprendizaje: agregue un botón a la pantalla del cerebro que se presiona para detener la conducción del robot.
| Cantidad | Materiales necesarios |
|---|---|
| 1 |
Kit de inicio VEX V5 Classroom (con firmware actualizado) |
| 1 |
VEXcode V5 (última versión, Windows, macOS, Chromebook) |
| 1 |
Cuaderno de ingeniería |
| 1 |
Plantilla Clawbot (transmisión de 2 motores, sin giroscopio) |
![]() Teacher Toolbox
Teacher Toolbox
¡Para obtener sugerencias sobre estrategias de enseñanza para esta sección, revise la columna Entrega de la Guía de ritmo para hacer o no hacer! (Google Doc / .docx / .pdf)
¡El Clawbot está listo para tomar decisiones!
Esta actividad te dará las herramientas para programar tu robot con comportamientos condicionales.
Los bloques [If then] y [If then else] son el foco principal dentro de la actividad, pero también se utilizan los bloques Operators y Sensing.
Puede utilizar la información de ayuda dentro de VEXcode V5 para obtener información sobre los bloques. Para obtener orientación sobre el uso de la función de ayuda, consulte el tutorial Uso de la ayuda.

![]() Consejos para profesores
Consejos para profesores
Si esta es la primera vez que el estudiante usa VEXcode V5, también puede ver los tutoriales en la barra de herramientas para aprender otras habilidades básicas.

Paso 1: Comencemos con una comprensión de las declaraciones condicionales
Antes de comenzar a programar con condicionales, primero mire el video tutorial If-Then-Else a continuación. También se puede encontrar como vídeo tutorial en VEXcode V5.
Paso 2: Comencemos a programar con declaraciones condicionales
Abra el proyecto de ejemplo de plantilla Clawbot (transmisión de 2 motores, sin giroscopio).
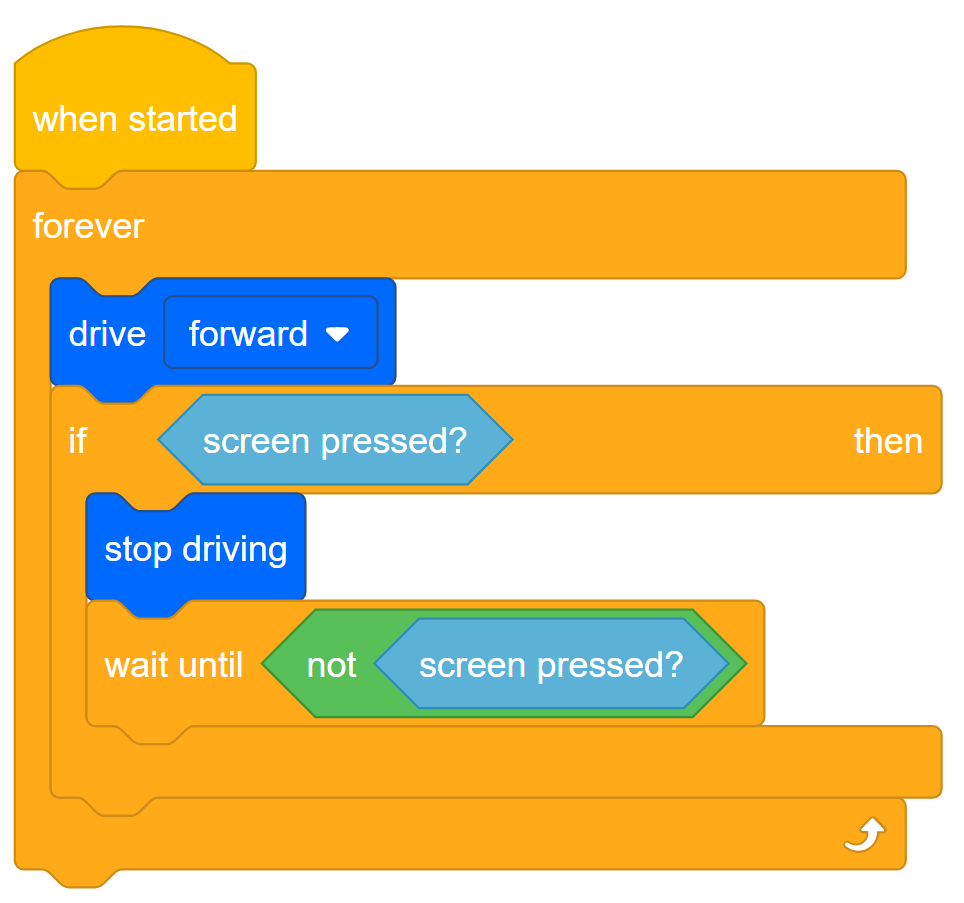
Construye el proyecto a continuación.
Haga lo siguiente en su cuaderno de ingeniería:
- Explica qué hace el Clawbot en el proyecto. Tendrá que explicar más que el hecho de que crea un botón de parada. Explica qué bloques hacen que el Clawbot haga qué.
- Escribe un resumen de una oración que capture lo que hace el proyecto.

- Pruebe para ver si su predicción de lo que el proyecto tiene que hacer el Clawbot es correcta.
- Guarde y descargue el proyecto como Crear un botón de parada para la ranura 1 en el Clawbot, y luego ejecútelo.
- Para obtener ayuda para descargar un proyecto, consulte el tutorial en VEXcode V5 que explica cómo descargar y ejecutar un proyecto.
- Revisa tus explicaciones del proyecto y añade notas para corregirlas según sea necesario.
![]() Caja de herramientas para maestros
-
Respuestas
Caja de herramientas para maestros
-
Respuestas

- Este proyecto hace que el robot avance continuamente, pero se detenga si se pulsa la pantalla. Lo hace mediante el uso de un bloque [Forever] para conducir y verificar continuamente. Si se pulsa la pantalla (TRUE), el Clawbot deja de conducir. No se espera que los
estudiantes entiendan por qué se utiliza el bloque [Esperar hasta]. Explique que el bloque [Esperar hasta] es necesario debido a la velocidad del flujo del programa del robot. Si no estuviera allí, los motores del Clawbot se comportarían como si el usuario estuviera presionando la pantalla una y otra vez a medida que recorre el proyecto. En su lugar, el bloque [Wait until] detiene el flujo del programa y no hace que el proyecto inicie el bucle [Forever] nuevamente hasta que el usuario deje de presionar la pantalla. - La línea de pseudocódigo podría ser tan simple como: Avanzar hasta pulsar la pantalla.
Los cuadernos de ingeniería de los estudiantes se pueden mantener y calificar individualmente (Google Doc / .docx / .pdf) o en equipo (Google Doc / .docx / .pdf). Los enlaces anteriores proporcionan una rúbrica diferente para cada enfoque. Siempre que se incluya una rúbrica en la planificación educativa, es una buena práctica explicar la rúbrica o al menos dar copias a los estudiantes antes de que comience la actividad.
Paso 3: Comprender la espera hasta el bloqueo
Observe que si se pulsa la pantalla de Brain, el flujo del proyecto se mueve tan rápido que el proyecto pasará al siguiente bloque, que es el bloque [Stop driving].
Por lo tanto, el proyecto necesita un bloque [Esperar hasta] que le diga al robot que permanezca detenido hasta que se libere la pantalla del cerebro. De lo contrario, el bloque [Forever] haría que el proyecto comenzara de nuevo con el bloque [Drive].
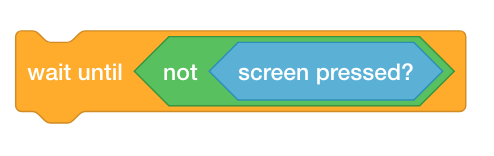
El bloque [Esperar hasta] es necesario debido a la velocidad del flujo del proyecto. Si no estaba allí, el proyecto pasaría al siguiente bloque antes de que el robot tuviera tiempo de responder
Paso 4: Cambiar el proyecto
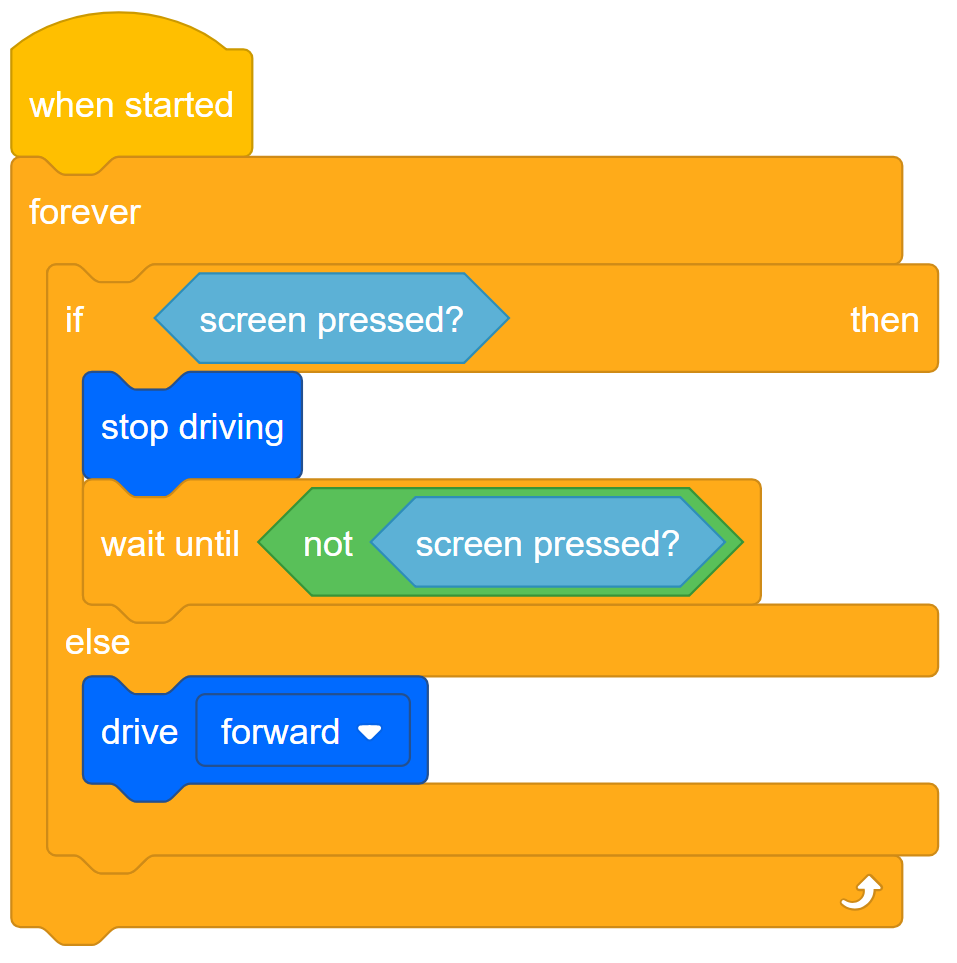
Nuestro siguiente paso es cambiar el bloque [If then] a un bloque [If then else ].

- Comience guardando Crear un botón de parada como el nuevo proyecto, StopOrDrive.
- Si necesita ayuda para guardar un proyecto, consulte el tutorial Nombrar y guardar su proyecto en VEXcode V5.
- A continuación, cree el proyecto StopOrDrive que se muestra a continuación.
- Descarga StopOrDrive a la ranura 2 en tu Clawbot.
- Para obtener ayuda para descargar un proyecto, consulte el tutorial en VEXcode V5 que explica cómo descargar y ejecutar un proyecto.
- Pruebe la creación de un botón de parada (ranura 1) y luego pruebe StopOrDrive (ranura 2) y compárelos para ver si hay alguna diferencia en el comportamiento del robot. Tenga en cuenta cualquier diferencia en su cuaderno de ingeniería.
![]() Consejos para profesores
Consejos para profesores
Las instrucciones dirigen a los estudiantes a videos tutoriales dentro de VEXcode V5 según sea necesario para guardar y descargar proyectos. Para obtener más ayuda, consulte la Base de conocimientos de robótica de VEX para obtener artículos de ayuda complementarios.
![]() Caja de herramientas para maestros
-
Respuesta
Caja de herramientas para maestros
-
Respuesta
Con respecto al comportamiento del robot, no debe haber diferencia entre los proyectos Creating a Stop Button y StopOrDrive.
Los dos proyectos hacen que el Clawbot se comporte de la misma manera. La única diferencia es el uso del bloque [If then else] en el proyecto StopOrDrive.
El uso del bloque [If then else] le permitirá añadir botones adicionales a la pantalla en las próximas actividades.
![]() Amplíe su aprendizaje
Amplíe su aprendizaje
A medida que avance este Laboratorio STEM, los estudiantes desarrollarán proyectos que permitan que la pantalla del Clawbot funcione como una interfaz de usuario. En preparación para eso, desafíe a los estudiantes a descubrir cómo dibujar un rectángulo de color en la pantalla que funcione como un botón. Debido a que pulsar en cualquier parte de la pantalla es actualmente la condición, el botón debe ocupar toda la pantalla. Los estudiantes deben hacer que el proyecto transmita un evento para dibujar el botón cuando comience.
Haga que los estudiantes usen la función de Ayuda en VEXcode V5 para obtener información sobre los bloques de Eventos y Aspectos. Indique a los estudiantes que primero aprendan cómo se organiza la pantalla del cerebro en un sistema de coordenadas en la información del bloque [Draw rectangle]. Tendrán que entender esto para establecer parámetros dentro de ese bloque. Las coordenadas utilizadas corresponden al número de píxeles, no al número de la columna o fila. Este es el diseño de la pantalla:

Los estudiantes deben planificar, probar y perfeccionar estos cambios en el proyecto mientras lo documentan en sus cuadernos de ingeniería. Para la rúbrica del cuaderno de ingeniería individual, haga clic en uno de estos enlaces (Google Doc / .docx / .pdf), o haga clic en uno de los siguientes enlaces para los cuadernos del equipo (Google Doc / .docx / .pdf).
Aquí hay un ejemplo de solución:

Como puede ver, el botón se dibuja para ocupar toda la pantalla comenzando en el origen (0, 0) y llenando los 480 píxeles horizontales (eje x) y los 240 píxeles verticales (eje y).