
Pemrograman dengan Kondisi - Berbasis Blok
 Kotak Alat Guru
-
Tujuan Kegiatan Ini
Kotak Alat Guru
-
Tujuan Kegiatan Ini
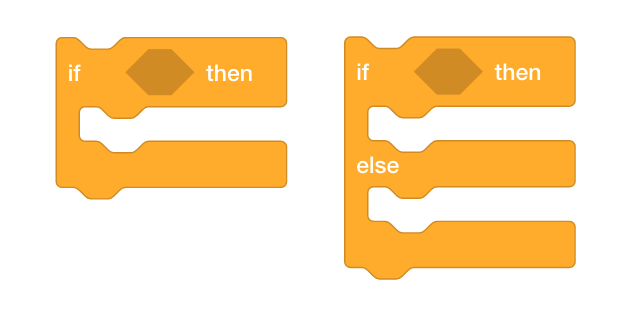
Pemrograman dengan kondisi dapat dilakukan dengan menggunakan blok [If then]atau[If then else] dalam suatu proyek. Aktivitas ini akan memperkenalkan siswa pada penggunaan blok [Jika maka] untuk menggerakkan robot maju kecuali layar ditekan. Bagian akhir aktivitas meminta mereka untuk menyempurnakan proyek dengan menggunakan blok [If then else] dan bukan blok [If then].
Untuk informasi lebih lanjut tentang blok [If then]dan[If then else] atau blok lain yang digunakan dalam aktivitas ini, kunjungi informasi bantuan dalam VEXcode V5. Untuk informasi lebih lanjut tentang alat bantuan bawaan ini, klikdi sini.
Berikut ini adalah garis besar apa yang akan dilakukan siswa Anda dalam kegiatan ini:
- Tonton video tutorial BlokIf Then Elselalu gunakan templat Clawbot (Drivetrain 2-motor, Tanpa Gyro) untuk membangun proyekMembuat Tombol Berhentiyang ditampilkan dan prediksikan apa yang akan dilakukan proyek tersebut.
- Sempurnakan proyek contohMembuat Tombol Berhentidengan menggunakan blok [If then else] dengan perilaku "else" yang diatur untuk melaju maju.
- Perluas Pembelajaran Anda:Menambahkan tombol ke layar otak yang ditekan untuk menghentikan pengendaraan robot.
| Kuantitas | Bahan-bahan yang Dibutuhkan |
|---|---|
| 1 |
Kit Pemula Kelas VEX V5 (dengan firmware terbaru) |
| 1 |
VEXcode V5 (versi terbaru, Windows, macOS, Chromebook) |
| 1 |
Buku Catatan Teknik |
| 1 |
Templat Clawbot (Drivetrain 2-motor, Tanpa Gyro) |
Kotak Peralatan Guru
Untuk saran mengenai strategi pengajaran untuk bagian ini, tinjau kolom Penyampaian pada Panduan Kecepatan Yang Harus Dilakukan atau Tidak Dilakukan! (Google Doc / .docx / .pdf)
Clawbot siap mengambil keputusan!
Aktivitas ini akan memberi Anda alat untuk memprogram robot Anda dengan perilaku bersyarat.
Blok [Jika maka]dan[Jika maka yang lain] adalah fokus utama dalam aktivitas ini, tetapi blok Operator dan Penginderaan juga digunakan.

Anda dapat menggunakan informasi Bantuan di dalam VEXcode V5 untuk mempelajari tentang blok. Untuk panduan dalam menggunakan fitur Bantuan, lihat tutorial Menggunakan Bantuan.

 Tips Guru
Tips Guru
Jika ini adalah pertama kalinya siswa menggunakan VEXcode V5, mereka juga dapat melihat Tutorial di bilah alat untuk mempelajari keterampilan dasar lainnya.

Langkah 1: Mari kita mulai dengan memahami pernyataan kondisional
Sebelum Anda memulai pemrograman dengan kondisional, tonton dulu video tutorial If-Then-Else di bawah ini. Ini juga dapat ditemukan sebagai video Tutorial di VEXcode V5.
Langkah 2: Mari mulai pemrograman dengan pernyataan kondisional
Buka proyek contoh templat Clawbot (Drivetrain 2-motor, Tanpa Gyro).

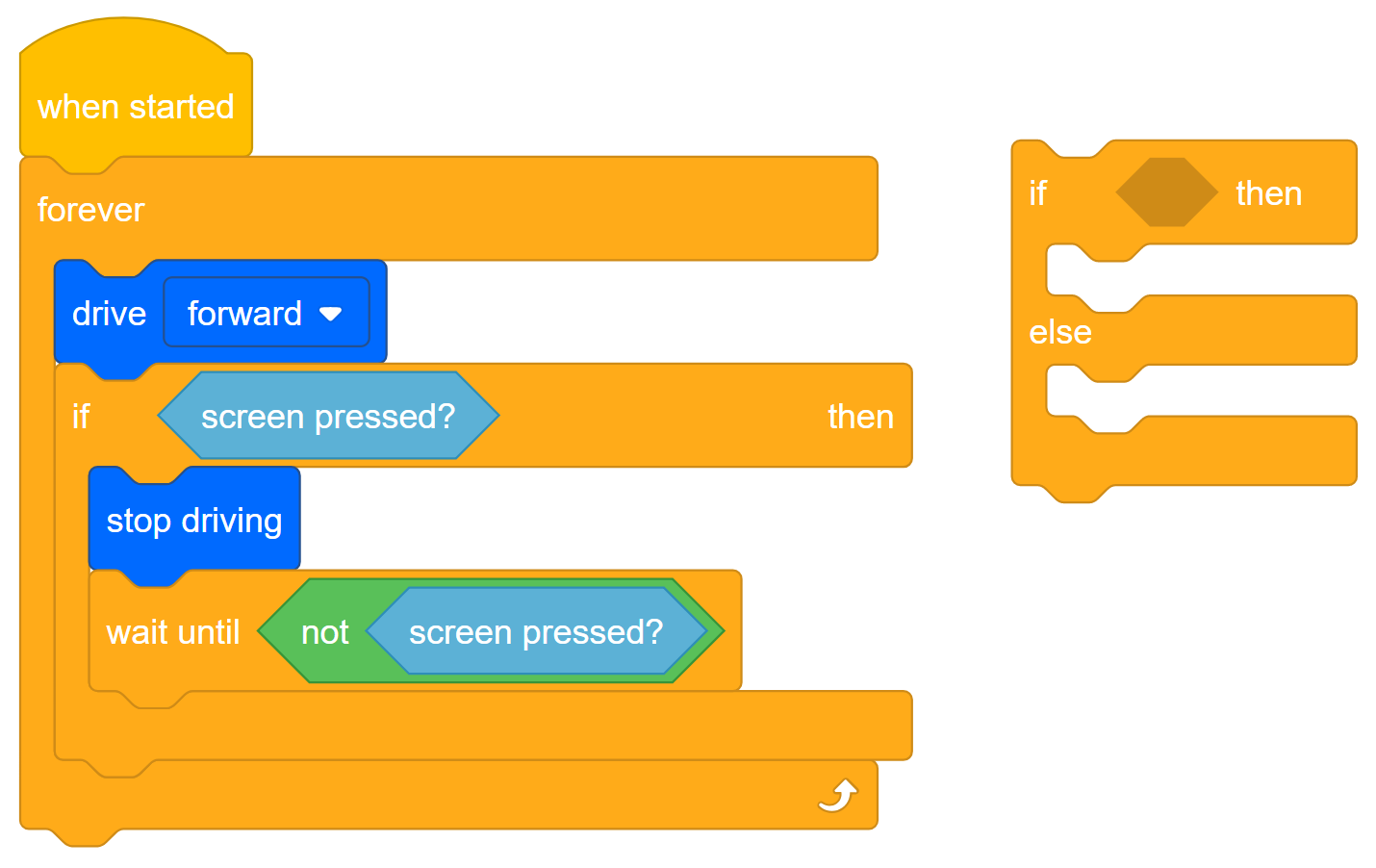
Bangun proyek di bawah ini.

Lakukan hal berikut di buku catatan teknik Anda:
- Jelaskan apa saja yang dilakukan proyek Clawbot. Anda perlu menjelaskan lebih dari sekadar fakta bahwa hal itu menciptakan tombol berhenti. Jelaskan blok mana yang membuat Clawbot melakukan apa.
- Tulis ringkasan satu kalimat yang menggambarkan apa yang dilakukan proyek tersebut.

- Uji untuk melihat apakah prediksi Anda tentang apa yang dilakukan proyek Clawbot itu benar.
- Simpan dan unduh proyek sebagaiMembuat Tombol Berhentihingga Slot 1 pada Clawbot, lalu jalankan.
- Untuk bantuan mengunduh proyek, lihat tutorial di VEXcode V5 yang menjelaskan caraMengunduh dan Menjalankan Proyek.
- Periksa penjelasan Anda tentang proyek dan tambahkan catatan untuk memperbaikinya bila diperlukan.
Kotak Alat Guru
-
Jawaban

- Proyek ini membuat robot terus melaju ke depan tetapi berhenti jika layar ditekan. Hal ini dilakukan dengan menggunakan blok [Forever] untuk menggerakkan dan memeriksa secara terus-menerus. Jika layar ditekan (BENAR), maka Clawbot berhenti mengemudi.
Siswa tidak diharapkan memahami mengapa blok [Tunggu sampai] digunakan. Jelaskan bahwa blok [Tunggu hingga] diperlukan karena kecepatan aliran program robot. Jika tidak ada, motor Clawbot akan berperilaku seolah-olah pengguna menekan layar berulang kali saat mengulang proyek. Sebaliknya, blok [Tunggu hingga] menghentikan aliran program dan tidak membuat proyek memulai putaran [Selamanya] lagi hingga pengguna berhenti menekan layar. - Baris pseudocode bisa sesederhana: Terus maju hingga layar ditekan.
Buku catatan teknik siswa dapat dikelola dan dinilai secara individu (Google Doc / .docx / .pdf) atau sebagai tim (Google Doc / .docx / .pdf). Tautan sebelumnya menyediakan rubrik yang berbeda untuk setiap pendekatan. Setiap kali rubrik disertakan dalam perencanaan pendidikan, praktik yang baik adalah menjelaskan rubrik tersebut atau setidaknya memberikan salinannya kepada siswa sebelum kegiatan dimulai.
Langkah 3: Memahami blok tunggu hingga
Perhatikan bahwa jika layar Otak ditekan, aliran proyek bergerak sangat cepat sehingga proyek akan berpindah ke blok berikutnya, yaitu blok [Berhenti mengemudi].
Jadi, proyek tersebut memerlukan blok [Tunggu hingga] yang memberi tahu robot untuk tetap berhenti hingga layar Otak dilepaskan. Jika tidak, blok [Forever] akan menyebabkan proyek dimulai lagi dengan blok [Drive].
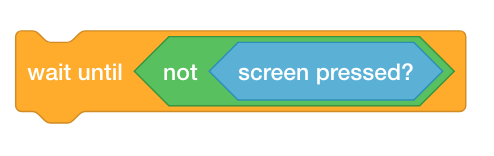
Blok [Tunggu sampai] diperlukan karena kecepatan alur proyek. Jika tidak ada, proyek akan berpindah ke blok berikutnya sebelum robot sempat merespons
Langkah 4: Ubah proyek
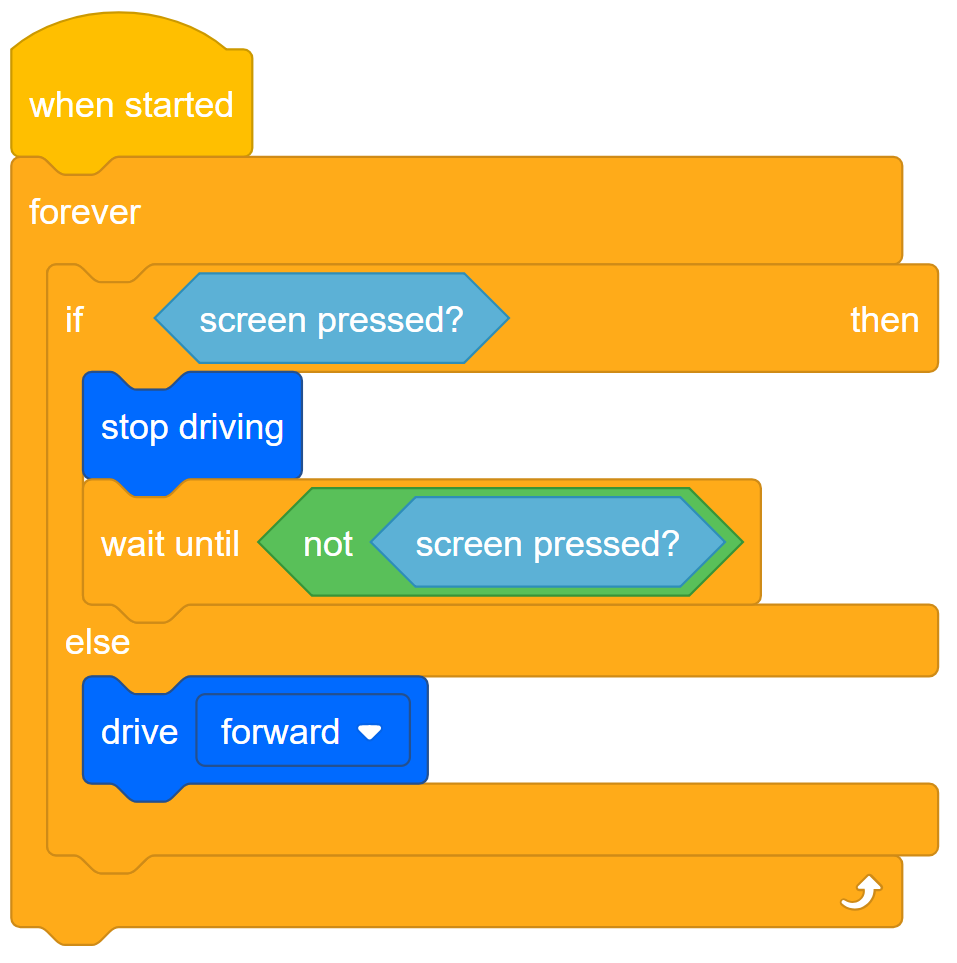
Langkah kita selanjutnya adalah mengubah blok [If then] menjadi blok [If then else].
- Mulailah dengan menyimpanMembuat Tombol Berhentisebagai proyek baru,StopOrDrive.
- Jika Anda memerlukan bantuan untuk menyimpan proyek, lihat tutorial Penamaan dan Penyimpanan Proyek Anda di VEXcode V5.
- Kemudian buat proyekStopOrDriveseperti yang ditunjukkan di bawah ini.
- UnduhStopOrDriveke Slot 2 di Clawbot Anda.
- Untuk bantuan mengunduh proyek, lihat tutorial di VEXcode V5 yang menjelaskan caraMengunduh dan Menjalankan Proyek.
- UjiMembuat Tombol Berhenti(Slot 1) lalu ujiStopOrDrive(Slot 2) dan bandingkan untuk melihat apakah ada perbedaan dalam perilaku robot. Catat perbedaan apa pun di buku catatan teknik Anda.
Tips Guru
Instruksi mengarahkan siswa ke video tutorial dalam VEXcode V5 sesuai kebutuhan untuk menyimpan dan mengunduh proyek. Untuk bantuan lebih lanjut, lihatVEX Robotics Knowledge Baseuntuk artikel bantuan tambahan.
Kotak Alat Guru
-
Jawaban
Mengenai perilaku robot, seharusnyatidakada perbedaan antaraproyek Membuat Tombol BerhentidanStopOrDrive.
Kedua proyek tersebut membuat Clawbot berperilaku dengan cara yang sama. Satu-satunya perbedaan adalah penggunaan blok [If then else] dalam proyekStopOrDrive.
Menggunakan blok [If then else] akan memungkinkan Anda menambahkan tombol tambahan ke layar dalam aktivitas mendatang.
 Perluas Pembelajaran Anda
Perluas Pembelajaran Anda
Saat Lab STEM ini berlangsung, siswa akan mengembangkan proyek yang memungkinkan layar Clawbot berfungsi sebagai antarmuka pengguna. Sebagai persiapannya, tantang siswa untuk mencari cara menggambar persegi panjang berwarna di layar yang berfungsi seperti tombol. Karena menekan bagian mana saja pada layar merupakan kondisi saat ini, tombol tersebut seharusnya memenuhi seluruh layar. Siswa harus meminta proyek menyiarkan suatu kejadian untuk menggambar tombol saat dimulai.
Mintalah siswa menggunakan fitur Bantuan di VEXcode V5 untuk informasi tentang blok Kejadian dan Tampilan. Arahkan siswa untuk terlebih dahulu mempelajari bagaimana layar otak diatur dalam sistem koordinat dalam informasi blok [Gambar persegi panjang]. Mereka perlu memahami ini untuk menetapkan parameter dalam blok itu. Koordinat yang digunakan sesuai dengan jumlah piksel, bukan jumlah kolom atau baris. Berikut tata letak layarnya:

Siswa harus merencanakan, menguji, dan menyempurnakan perubahan pada proyek sambil mendokumentasikannya dalam buku catatan teknik mereka. Untuk rubrik buku catatan teknik individual, klik salah satu tautan ini (Google Doc / .docx / .pdf), atau klik salah satu tautan berikut untuk buku catatan tim (Google Doc / .docx / .pdf).
Berikut adalah contoh solusinya:

Seperti yang Anda lihat, tombol digambar untuk memenuhi seluruh layar dimulai dari titik asal (0, 0) dan mengisi semua 480 piksel horizontal (sumbu x) dan 240 piksel vertikal (sumbu y).