
Lý lịch
Đơn vị Thử thách hạ cánh trên sao Hỏa sẽ thử thách học sinh của bạn xây dựng các dự án VEXcode GO để giải quyết một vấn đề. Đơn vị này giới thiệu cho sinh viên cách sử dụng Cảm biến mắt ở mặt trước của Cơ sở mã trong một thử thách, lấy cảm hứng từ quy trình mà các nhà khoa học sử dụng khi cố gắng hạ cánh tàu vũ trụ, như xe tự hành Perseverance trên sao Hỏa 2020. Học sinh sẽ mã hóa Cơ sở mã để phát hiện chướng ngại vật, sau đó dừng lái để chỉ ra rằng có chướng ngại vật tại địa điểm hạ cánh.
Sứ mệnh Sao Hỏa 2020 của NASA
Sứ mệnh Sao Hỏa 2020 của NASA giải quyết các mục tiêu khoa học ưu tiên hàng đầu trong quá trình khám phá Sao Hỏa: sự sống, khí hậu, địa chất và con người. Nhưng trước khi xe tự hành Perseverance có thể bắt đầu nhiệm vụ thu thập mẫu đá và đất trên bề mặt, xe tự hành cần phải hạ cánh an toàn xuống Hành tinh Đỏ.
Theo NASA, chỉ có khoảng 40% các sứ mệnh được gửi tới sao Hỏa (bởi bất kỳ cơ quan vũ trụ nào) là thành công. Toàn bộ quá trình Đi vào, Hạ cánh và Hạ cánh chỉ mất vài phút, nhưng tàu vũ trụ chở xe tự hành Perseverance cần phải giảm tốc độ từ gần 20.000 km/giờ (~12.500 dặm/giờ) xuống 0 và tìm một khu vực bằng phẳng, thoáng đãng để hạ cánh. Bề mặt sao Hỏa có rất nhiều chướng ngại vật - hố va chạm lớn, vách đá, vết nứt và tảng đá lởm chởm. Những cơn gió khó lường cũng có thể gây ra nhiều biến chứng hơn nữa.

Để đảm bảo hạ cánh an toàn, xe tự hành Perseverance sẽ chụp ảnh trong khi hạ cánh và so sánh những hình ảnh đó với bản đồ. Nó có thể nhanh chóng quyết định xem khu vực đó có được các nhà khoa học xác định là nguy hiểm hay không và thực hiện các điều chỉnh để hạ cánh xuống khu vực trống. Hãy xem hình ảnh động bên dưới để hiểu rõ hơn về quá trình ra quyết định của xe tự hành bằng cách sử dụng ảnh chụp khi hạ cánh.
Trong Đơn vị này, học sinh sẽ mã hóa Cơ sở mã để phát hiện chướng ngại vật tại các địa điểm hạ cánh trên Sân của mình nhằm giúp đảm bảo xe tự hành hạ cánh an toàn.
Cảm biến là gì?
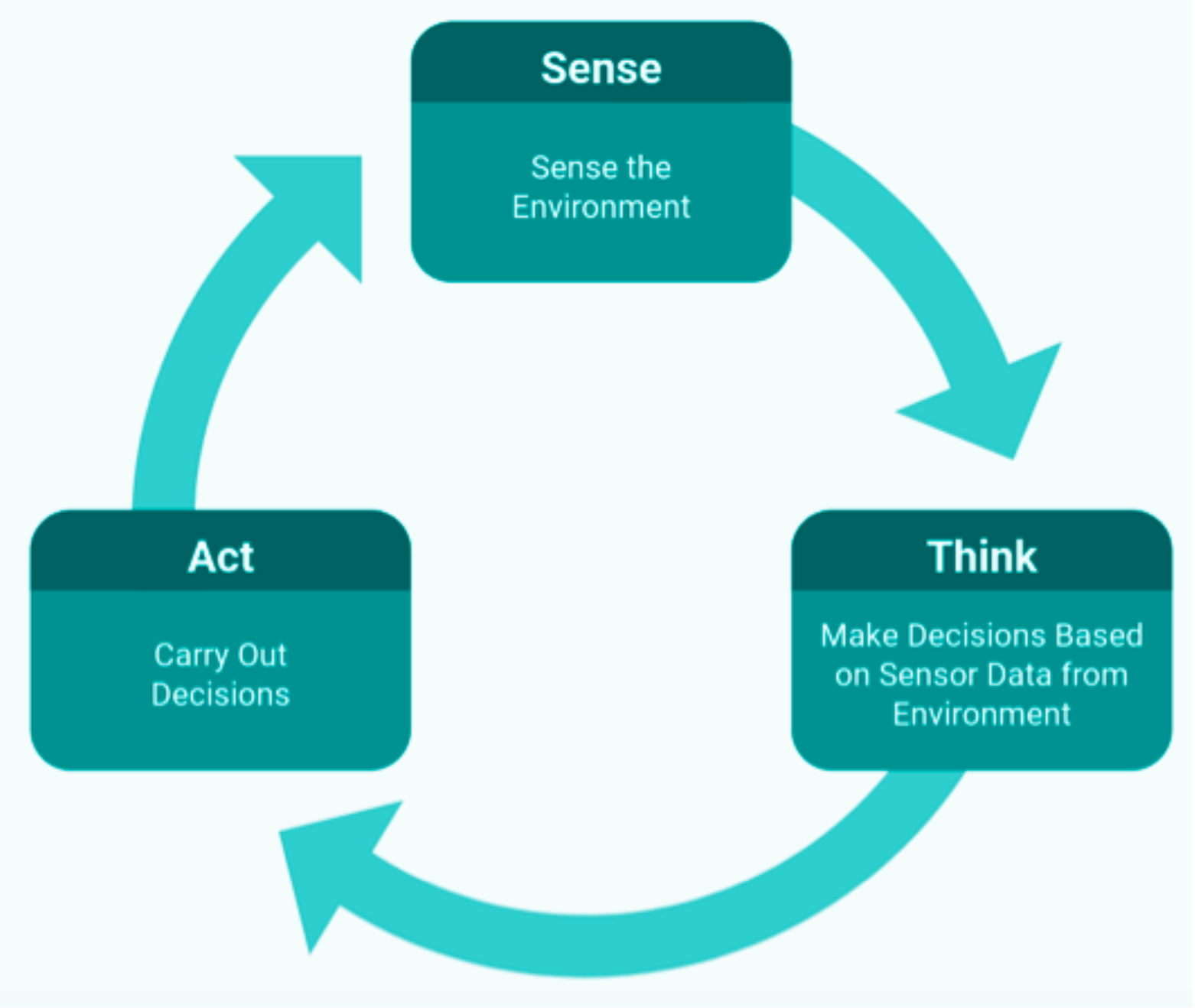
Về bản chất, cảm biến là một thiết bị giúp robot hiểu được thế giới xung quanh nó. Nó thực hiện điều này bằng cách thu thập và báo cáo dữ liệu về môi trường xung quanh, sau đó có thể sử dụng dữ liệu này trong một dự án để giúp robot đưa ra quyết định hoặc thực hiện một số hành vi nhất định. Trình tự này có thể được coi là vòng lặp quyết định Cảm nhận → Suy nghĩ → Hành động.
Trong Đơn vị này, Cơ sở mã sẽ sử dụng Cảm biến mắt để phát hiện các vật thể trên sân nhằm giúp dọn dẹp khu vực để xe tự hành hạ cánh an toàn. Dự án do sinh viên tạo ra sẽ thực hiện vòng lặp này khi Cảm biến mắt trên Cơ sở mã sẽ Cảm biến sự hiện diện của một vật thể, sau đó VEXcode GO ra lệnh Suy nghĩ để đưa ra quyết định dựa trên việc Cảm biến mắt có phát hiện vật thể hay không. Sau đó, Cơ sở mã sẽ Hành động và dừng lái xe dựa trên sự hiện diện của vật thể.
Cảm biến mắt là gì?
Cảm biến mắtlà cảm biến có thể xác định ba yếu tố - sự hiện diện của vật thể, màu sắc của vật thể và độ sáng của vật thể hoặc bề mặt. Trong Đơn vị này, Cảm biến mắt được sử dụng để phát hiện vật thể để có thể đưa vật thể đó ra khỏi khu vực hạ cánh. Dữ liệu do Cảm biến mắt báo cáo có thể được xem trên Bảng điều khiển màn hình, cung cấp cho học sinh hình ảnh trực quan về những gì robot đang "nhìn thấy" và có thể được sử dụng để giúp các em kết nối giữa các cảm biến và hành vi của robot. Để biết thêm thông tin về cách sử dụng Bảng điều khiển giám sát trong VEXcode GO, hãy xem bài viết Thư viện VEX này.
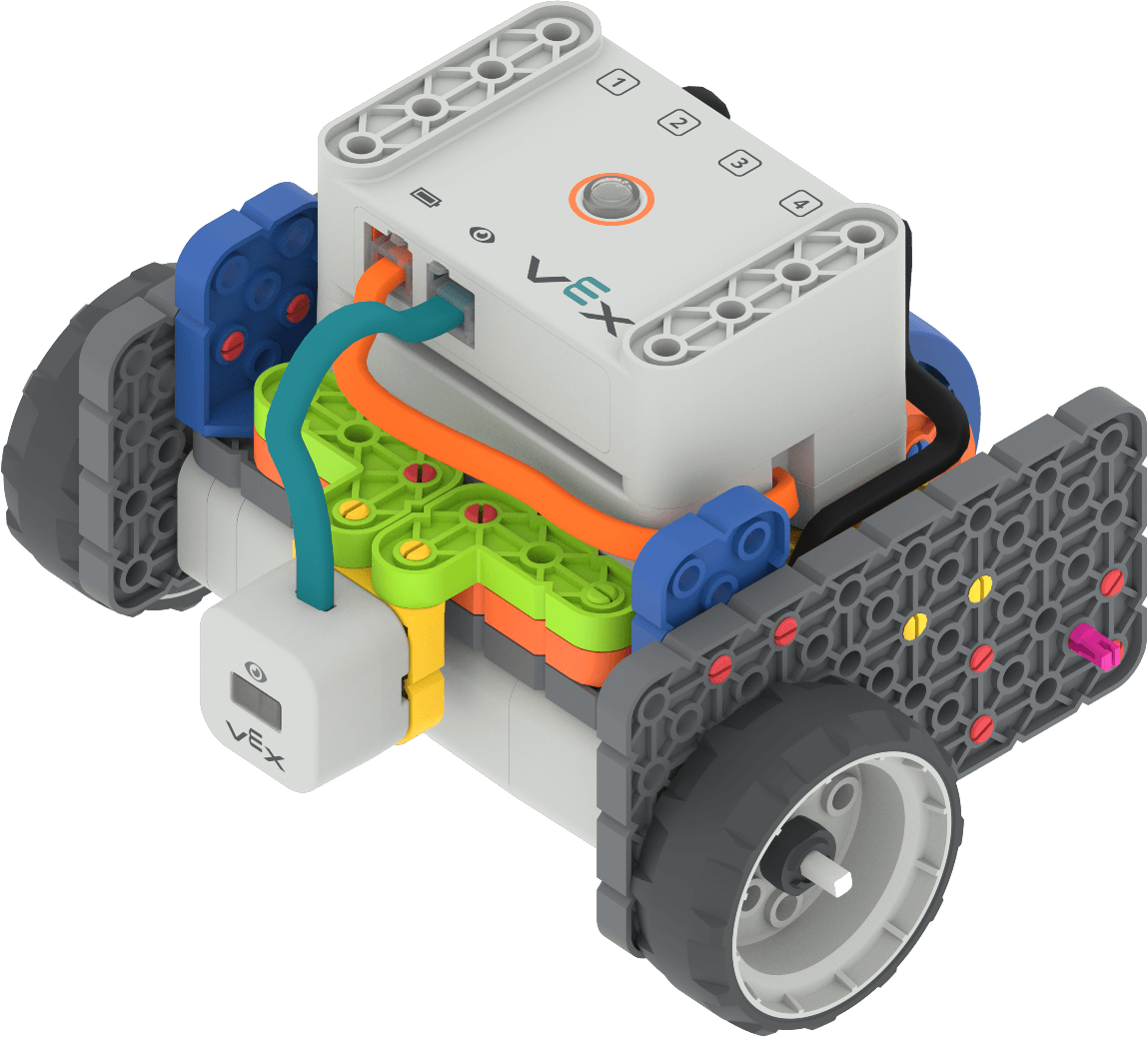
Cảm biến mắt trên Code Base - bản dựng Eye Forward nằm ở mặt trước, như minh họa trong hình ảnh bên dưới. Cảm biến mắt có thể được sử dụng để phát hiện sự hiện diện hoặc vắng mặt của một vật thể, cũng như màu sắc hoặc độ sáng của vật thể đó.
Cảm biến mắt sử dụng ánh sáng hồng ngoại để phát hiện vật thể. Các vật thể có màu sáng phản chiếu ánh sáng hồng ngoại và được Cảm biến mắt phát hiện dễ dàng hơn. Các vật thể có màu tối hấp thụ ánh sáng hồng ngoại và Cảm biến mắt không phát hiện ra chúng. Trong quá trình thực hiện, hãy sử dụng giấy trắng hoặc giấy sáng màu cho các chướng ngại vật để đảm bảo rằng Cảm biến mắt có thể phát hiện ra các vật thể này.
Trong Đơn vị này, Cảm biến mắt sẽ được sử dụng để phát hiện khi có vật thể xuất hiện trên đường đi của Cơ sở mã. Vị trí của Cảm biến mắt trên Đế mã có nghĩa là nó chỉ có thể phát hiện các vật thể ở ngay phía trước nó. Hãy lưu ý điều này khi bạn đưa Cơ sở mã và các chướng ngại vật cho học sinh của mình để các tài liệu này giúp học sinh đạt được thành công.
Để biết thêm thông tin về Cảm biến mắt và cách thức hoạt động của nó, hãy xem bài viếtMã hóa bằng Cảm biến mắt VEX GOThư viện VEX.
VEXcode GO là gì?
VEXcode GO là môi trường lập trình được sử dụng để giao tiếp với robot VEX GO. Học sinh sử dụng giao diện kéo và thả để tạo các dự án VEXcode GO để điều khiển hành động của robot. Mục đích của mỗi khối có thể được xác định bằng các tín hiệu trực quan như hình dạng, màu sắc và nhãn. Để biết thêm thông tin về cách làm việc với VEXcode GO, xem Phần VEXcode GO của Thư viện VEX.
Các khối trong VEXcode GO biểu thị các lệnh robot được sử dụng để tạo một dự án trong VEXcode GO. Dưới đây là danh sách các khối chính được sử dụng trong Đơn vị này.
| Khối VEXcode GO | Hành vi |
|---|---|
 |
Khối {When started} bắt đầu chạy ngăn xếp khối được đính kèm khi dự án được bắt đầu. |
 |
Khối [Drive] di chuyển Hệ thống truyền động về phía trước hoặc phía sau mãi mãi. |
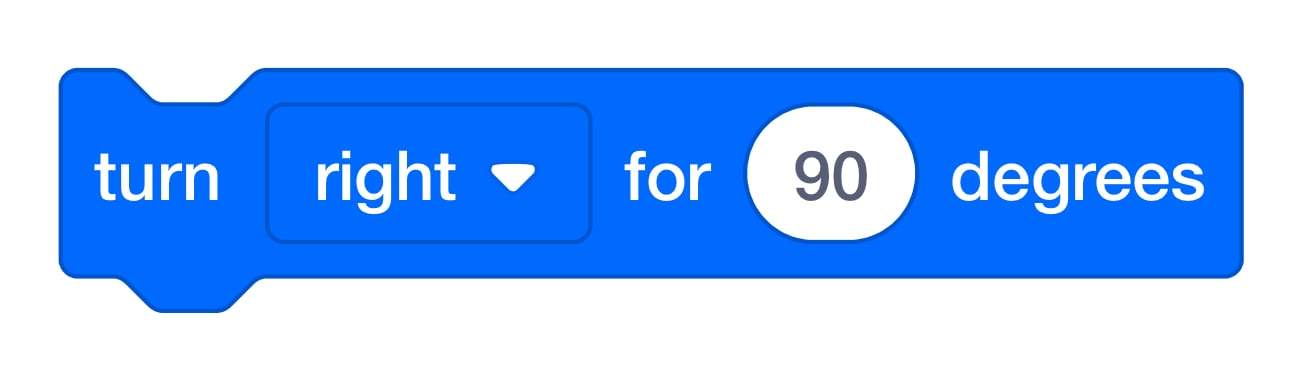 |
Khối [Quay tới] sẽ quay Hệ thống truyền động theo một khoảng cách nhất định. |
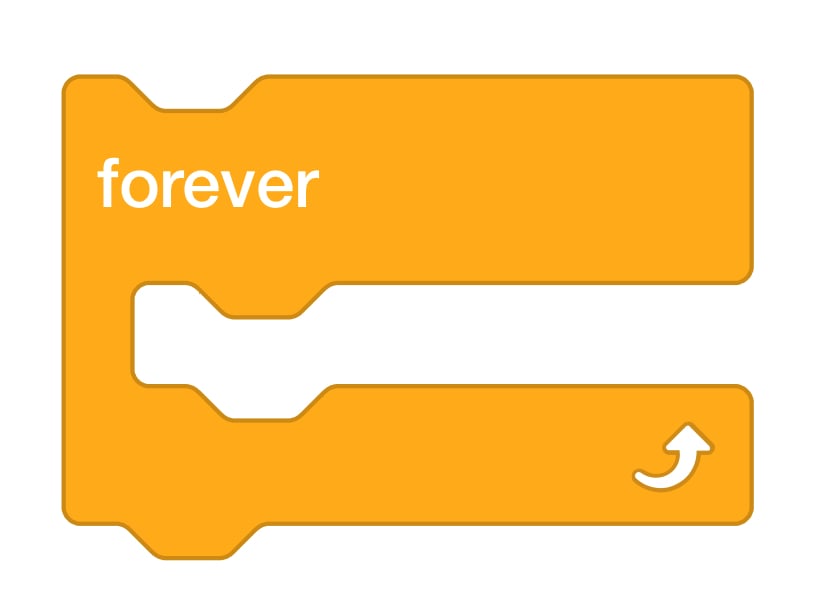 |
Khối [Mãi mãi] lặp lại bất kỳ khối nào có trong chữ 'C' mãi mãi. |
 |
Khối [Chờ] sẽ đợi trong một khoảng thời gian cụ thể trước khi chuyển sang khối tiếp theo trong một dự án. |
 |
Khối [Wait until] chờ điều kiện bên trong nó báo cáo là ĐÚNG trước khi chuyển sang khối tiếp theo. |
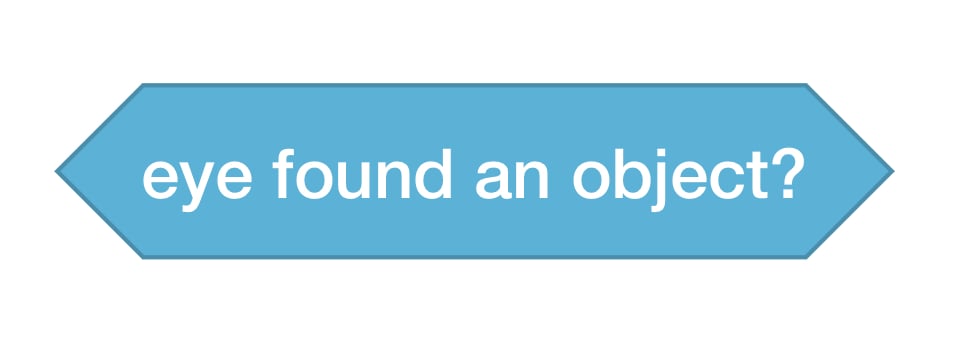 |
Khối <Found object> báo cáo liệu Cảm biến mắt có phát hiện vật thể hay không. |
 |
Khối [Dừng lái] dừng Hệ thống truyền động. |
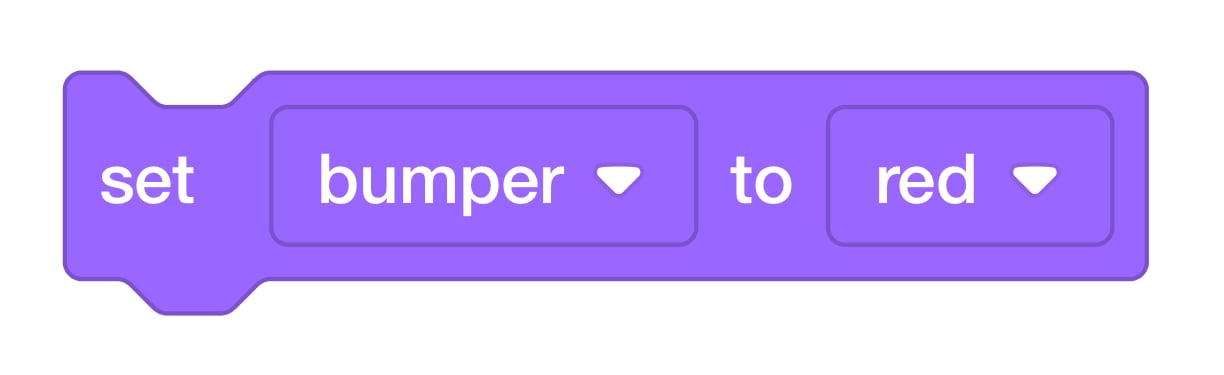 |
Khối [Đặt màu cản] thiết lập màu của cản đèn LED. |
Khối [Chờ cho đến khi] hoạt động như thế nào với Cảm biến mắt?
Trong Đơn vị này, học sinh sẽ sử dụng Cảm biến mắt trên Cơ sở mã để phát hiện chướng ngại vật trong khu vực hạ cánh của xe tự hành trên sao Hỏa. Để mã hóa điều này, họ sẽ sử dụng khối [Chờ cho đến] trong một dự án. Khối [Chờ cho đến khi] là khối Điều khiển kiểm tra nhiều lần một điều kiện để kiểm soát luồng của một dự án. Một dự án sẽ không chuyển sang khối tiếp theo cho đến khi điều kiện trong khối [Chờ cho đến khi] được báo cáo là đúng. Trong Đơn vị này, khối [Chờ cho đến khi] được sử dụng với khối<Found object> làm điều kiện - để nó sẽ đợi cho đến khi Cảm biến mắt phát hiện ra một vật thể và điều kiện của khối <Found object> là đúng - để chuyển sang khối tiếp theo trong dự án.
Các khối [Chờ cho đến khi] có thể được sử dụng kết hợp với các khối không chờ, như khối [Lái] trong Đơn vị này, để Cơ sở mã có thể lái về phía trướccho đếnCảm biến mắt phát hiện ra một vật thể. Xem hình ảnh động bên dưới để thấy khối [Chờ cho đến khi] được sử dụng để ngăn robot đâm vào chướng ngại vật.
Để xem tiến trình dự án theo thời gian thực khi robot của bạn đang chạy, hãy xem Tính năng nổi bật trong VEXcode GO. Khi bắt đầu dự án, điểm nổi bật màu xanh lá cây sẽ xuất hiện xung quanh khối [Chờ cho đến khi] cho đến khi điều kiện là đúng. Điểm nổi bật màu xanh lá cây sẽ xuất hiện để bỏ qua các khối không chờ (trong trường hợp này là khối [Drive]) vì các lệnh này được thực thi nhanh chóng.
Trong Đơn vị này, học sinh sẽ sử dụng kết hợp các khối chờ, như khối [Chờ cho đến], và các khối không chờ, như khối [Lái xe], trong các dự án của mình để hoàn thành các hoạt động và thử thách trong Phòng thí nghiệm. Để tìm hiểu thêm về các khối chờ và không chờ trong VEXcode GO, hãy đọc bài viết Thư viện VEX này.
Chuẩn bị cho Thử thách Mở trong Đơn vị này
Trong Đơn vị này, học sinh sẽ được yêu cầu sử dụng những gì đã học trước đó để tạo ra một dự án nhằm giải quyết một thách thức. Vì việc thường xuyên khuyến khích học sinh giải quyết vấn đề và áp dụng các kỹ năng đã học theo cách mới là rất quan trọng, chúng tôi khuyến khích bạn khuyến khích học sinh và sử dụng các chiến lược này để xây dựng khả năng phục hồi và giúp hướng dẫn các em vượt qua thử thách. Sau đây là một số gợi ý giúp học sinh thử nghiệm các dự án của mình:
Đưa ra phản hồi mà không đưa ra giải pháp -Việc mắc lỗi khi giải quyết một thử thách là điều được mong đợi và khuyến khích. “Những lỗi trong học tập có thể tạo ra cơ hội và giúp nhận ra mối liên hệ.”1 Việc tạo ra một quy trình giải quyết vấn đề quen thuộc với học sinh có thể giúp các em học cách xác định vấn đề và tiến triển khi mắc lỗi, do đó giảm thiểu sự gián đoạn và thất vọng. Hãy thử sử dụng chu trình giải quyết vấn đề sau đây với học sinh của bạn để giúp các em khắc phục sự cố trong dự án và đưa ra giải pháp của riêng mình.
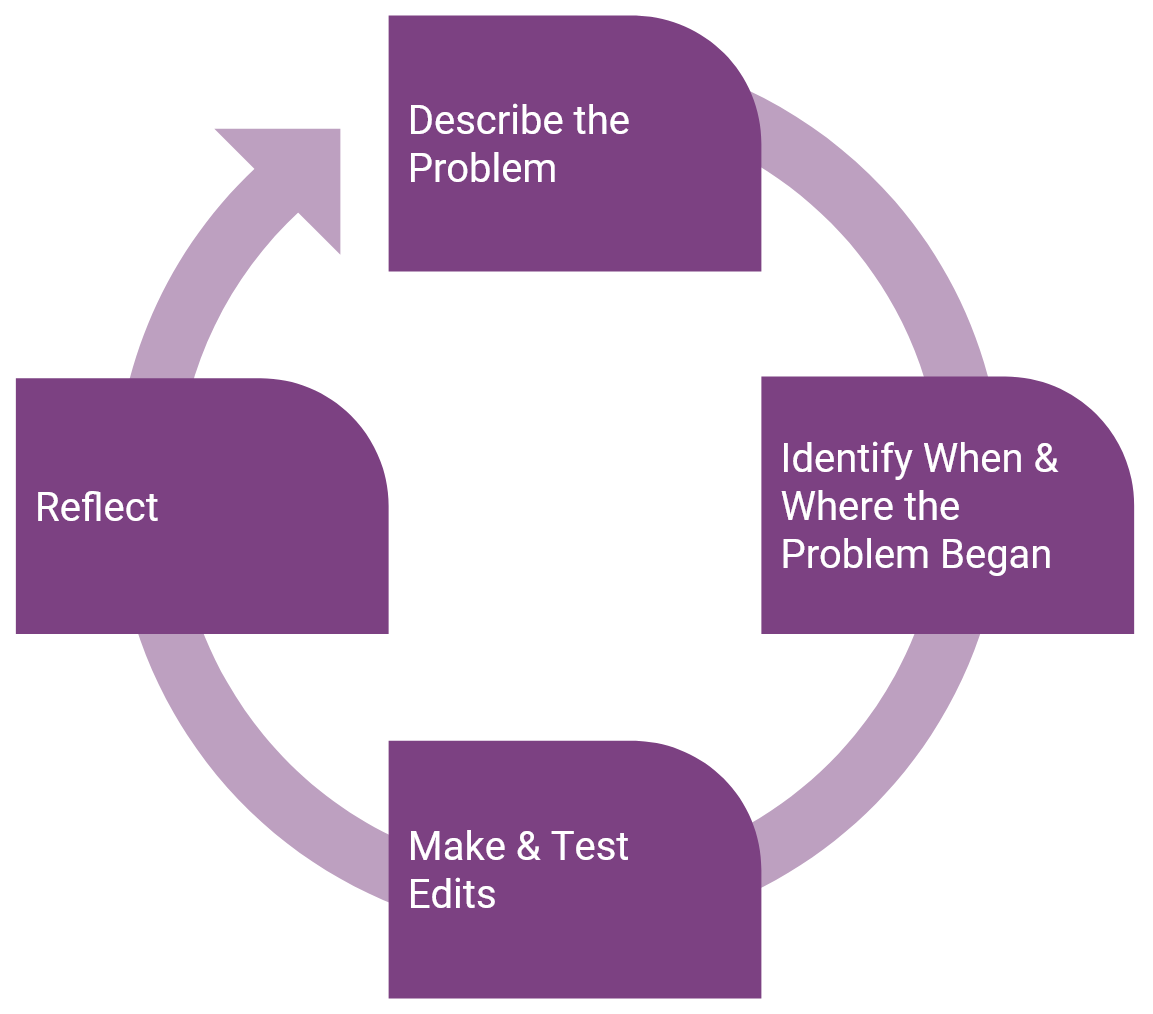
- Mô tả vấn đề
- Yêu cầu học sinh giải thích điều gì sai. Học sinh phải có khả năng liên hệ lỗi với mục tiêu chung hoặc thách thức hiện tại.
- Code Base đang hoạt động như thế nào trong dự án của họ? Robot nên di chuyển hướng ?
- Yêu cầu học sinh giải thích điều gì sai. Học sinh phải có khả năng liên hệ lỗi với mục tiêu chung hoặc thách thức hiện tại.
- Xác định khi nào và ở đâu vấn đề bắt đầu
- Hỏi học sinh lần đầu tiên nhận thấy vấn đề này khi nào.
- Phần nào của dự án đang được thực hiện?
- Nếu học sinh gặp khó khăn trong việc xác định lỗi nằm ở đâu trong dự án, hãy khuyến khích các em sử dụng tính năng Project Stepping trong VEXcode GO. Các tín hiệu trực quan được cung cấp cùng với tính năng Project Stepping có thể được sử dụng để giúp học sinh khắc phục sự cố trong dự án của mình bằng cách cho phép họ xem các khối được thực hiện từng khối một. Điều này sẽ giúp họ hình dung rõ hơn về khối nào có thể gây ra lỗi, do đó quá trình gỡ lỗi có thể trở nên hiệu quả và có mục tiêu hơn. Để biết thêm thông tin về cách sử dụng tính năng Bước dự án, hãy xem Bài viết Bước qua dự án trong Thư viện VEXcode GO VEX.
- Hỏi học sinh lần đầu tiên nhận thấy vấn đề này khi nào.
- Thực hiện & Chỉnh sửa thử nghiệm
- Khi phát hiện lỗi, học sinh nên chỉnh sửa dự án của mình. Học sinh có thể kiểm tra dự án sau mỗi lần chỉnh sửa. Nếu dự án thành công, họ có thể chuyển sang bước tiếp theo trong chu trình giải quyết vấn đề. Nếu dự án không thành công, họ có thể quay lại từ đầu và thử lại.
- Phản ánh
- Yêu cầu học sinh suy nghĩ về lỗi mà họ đã mắc phải và khắc phục trong quá trình này.
- Lỗi ở đây là gì? Bạn học được gì từ sai lầm này? Nó có thể giúp gì cho bạn khi viết mã Code Base lần sau?
- Khuyến khích học sinh nhận ra lỗi sai của mình và những gì học được từ quá trình này để giúp phát triển tư duy phát triển. Việc nhấn mạnh vào tư duy phát triển có thể giúp học sinh biết khi nào và làm thế nào để kiên trì cũng như khi nào cần nhờ giúp đỡ.2Nếu học sinh có thể coi quá trình của mình là tiền đề cho việc học tập mới thì các em có thể sử dụng các bước ở đây để thúc đẩy việc học của chính mình cũng như thúc đẩy việc học của các bạn cùng lớp. Khi học sinh gặp phải những vấn đề này và suy ngẫm về lỗi của mình, hãy khuyến khích các em chia sẻ lỗi và cách xử lý với các bạn học khác. Bằng cách này, học sinh có thể trở thành “nguồn học tập cho nhau”.3
- Yêu cầu học sinh suy nghĩ về lỗi mà họ đã mắc phải và khắc phục trong quá trình này.
Dọn sạch khu vực hạ cánh (Phòng thí nghiệm 2) được thiết kế như một cuộc khám phá mở, yêu cầu học sinh của bạn phải kiên trì để giải quyết thử thách. Trong Phòng thí nghiệm này, chúng tôi giới thiệu các vòng lặp với khối [Forever] và yêu cầu học sinh thử nghiệm sử dụng các vòng lặp trong dự án của mình để điều khiển Code Base đến và phát hiện tất cả các chướng ngại vật trên khu vực hạ cánh (Sân GO). Nếu việc sử dụng vòng lặp trong một dự án là điều mới mẻ đối với học sinh, bạn có thể phải thực hiện lại dự án nhiều lần để có thể sử dụng vòng lặp một cách hiệu quả. Sử dụng các gợi ý được nêu trong phần này để chuẩn bị cho học sinh trong quá trình thử nghiệm và sai sót, đồng thời giúp các em khắc phục sự cố trong dự án để đạt được mục tiêu của thử thách. Phần Hướng dẫn của Phần 1 và Phần 2 có thêm các hỗ trợ hướng dẫn để hướng dẫn học sinh vượt qua thử thách Thực hành 2. Việc có kế hoạch về cách bạn sẽ hỗ trợ giải quyết vấn đề và thử nghiệm trong Phòng thí nghiệm này có thể giúp bạn đáp ứng nhu cầu cá nhân của học sinh.
1 Hattie, John và Shirley Clarke. Học tập trực quan: Phản hồi. Routledge, Taylor & Francis Group, 2019.
2 Như trên.
3 Ibid, tr. 121