
പശ്ചാത്തലം
മാർസ് റോവർ: ലാൻഡിംഗ് ചലഞ്ച് യൂണിറ്റ് നിങ്ങളുടെ വിദ്യാർത്ഥികളെ ഒരു പ്രശ്നം പരിഹരിക്കുന്നതിനായി VEXcode GO പ്രോജക്ടുകൾ നിർമ്മിക്കാൻ വെല്ലുവിളിക്കും. മാർസ് 2020 പെർസെവറൻസ് റോവർ പോലുള്ള ബഹിരാകാശ പേടകങ്ങൾ ലാൻഡ് ചെയ്യാൻ ശ്രമിക്കുമ്പോൾ ശാസ്ത്രജ്ഞർ ഉപയോഗിക്കുന്ന പ്രക്രിയയിൽ നിന്ന് പ്രചോദനം ഉൾക്കൊണ്ട്, കോഡ് ബേസിന്റെ മുൻവശത്തുള്ള ഐ സെൻസർ എങ്ങനെ ഉപയോഗിക്കാമെന്ന് ഈ യൂണിറ്റ് വിദ്യാർത്ഥികളെ പരിചയപ്പെടുത്തുന്നു. ഒരു തടസ്സം കണ്ടെത്തുന്നതിന് വിദ്യാർത്ഥികൾ കോഡ് ബേസ് കോഡ് ചെയ്യും, തുടർന്ന് ലാൻഡിംഗ് സൈറ്റിൽ ഒരു തടസ്സം കണ്ടെത്തിയതായി സൂചിപ്പിക്കാൻ ഡ്രൈവിംഗ് നിർത്തും.
നാസയുടെ ചൊവ്വ 2020 ദൗത്യം
നാസയുടെ മാർസ് 2020 ദൗത്യം ചൊവ്വ പര്യവേക്ഷണത്തിനായുള്ള ഉയർന്ന മുൻഗണനയുള്ള ശാസ്ത്ര ലക്ഷ്യങ്ങളെ അഭിസംബോധന ചെയ്യുന്നു: ജീവൻ, കാലാവസ്ഥ, ഭൂമിശാസ്ത്രം, മനുഷ്യർ. എന്നാൽ പെർസെവറൻസ് റോവറിന് ഉപരിതലത്തിലെ പാറയുടെയും മണ്ണിന്റെയും സാമ്പിളുകൾ ശേഖരിക്കുന്ന ദൗത്യം ആരംഭിക്കുന്നതിന് മുമ്പ്, റോവർ ചുവന്ന ഗ്രഹത്തിൽ സുരക്ഷിതമായി ഇറങ്ങേണ്ടതുണ്ട്.
നാസയുടെ കണക്കനുസരിച്ച്, ചൊവ്വയിലേക്ക് (ഏതെങ്കിലും ബഹിരാകാശ ഏജൻസി) അയച്ച ദൗത്യങ്ങളിൽ ഏകദേശം 40% മാത്രമേ വിജയിച്ചിട്ടുള്ളൂ. എൻട്രി, ഡിസെന്റ്, ലാൻഡിംഗ് എന്നിവയുടെ മുഴുവൻ പ്രക്രിയയും മിനിറ്റുകൾ മാത്രമേ എടുക്കൂ, പക്ഷേ പെർസെവറൻസ് റോവർ വഹിക്കുന്ന ബഹിരാകാശ പേടകം മണിക്കൂറിൽ ഏകദേശം 20,000 കിലോമീറ്ററിൽ നിന്ന് (മണിക്കൂറിൽ ~12,500 മൈൽ) പൂജ്യത്തിലേക്ക് വേഗത കുറയ്ക്കുകയും ലാൻഡ് ചെയ്യുന്നതിന് തുറന്നതും പരന്നതുമായ ഒരു പ്രദേശം കണ്ടെത്തുകയും വേണം. ചൊവ്വയുടെ ഉപരിതലം തടസ്സങ്ങളാൽ നിറഞ്ഞിരിക്കുന്നു - കൂറ്റൻ ഉൽക്കാ ഗർത്തങ്ങൾ, പാറക്കെട്ടുകൾ, വിള്ളലുകൾ, കൂർത്ത പാറകൾ. പ്രവചനാതീതമായ കാറ്റുകൾ കൂടുതൽ സങ്കീർണതകൾക്ക് കാരണമാകും.

സുരക്ഷിതമായ ലാൻഡിംഗ് ഉറപ്പാക്കാൻ, പെർസെവറൻസ് റോവർ ഇറങ്ങുമ്പോൾ ചിത്രങ്ങൾ എടുക്കുകയും ആ ചിത്രങ്ങൾ മാപ്പുകളുമായി താരതമ്യം ചെയ്യുകയും ചെയ്യും. ആ പ്രദേശം അപകടകരമാണെന്ന് ശാസ്ത്രജ്ഞർ കണ്ടെത്തിയിട്ടുണ്ടോ എന്ന് അതിന് വേഗത്തിൽ തീരുമാനിക്കാനും തുറന്ന സ്ഥലത്ത് ഇറങ്ങുന്നതിന് മാറ്റങ്ങൾ വരുത്താനും കഴിയും. ഇറങ്ങുന്ന ഫോട്ടോകൾ ഉപയോഗിച്ച് റോവറിന്റെ തീരുമാന പ്രക്രിയ നന്നായി മനസ്സിലാക്കാൻ താഴെയുള്ള ആനിമേഷൻ കാണുക.
ഈ യൂണിറ്റിൽ, വിദ്യാർത്ഥികൾ അവരുടെ ഫീൽഡുകളിലെ ലാൻഡിംഗ് സൈറ്റുകളിലെ തടസ്സങ്ങൾ കണ്ടെത്തുന്നതിനും റോവറിന് സുരക്ഷിതമായ ലാൻഡിംഗ് ഉറപ്പാക്കുന്നതിനും കോഡ് ബേസ് കോഡ് ചെയ്യും.
സെൻസർ എന്താണ്?
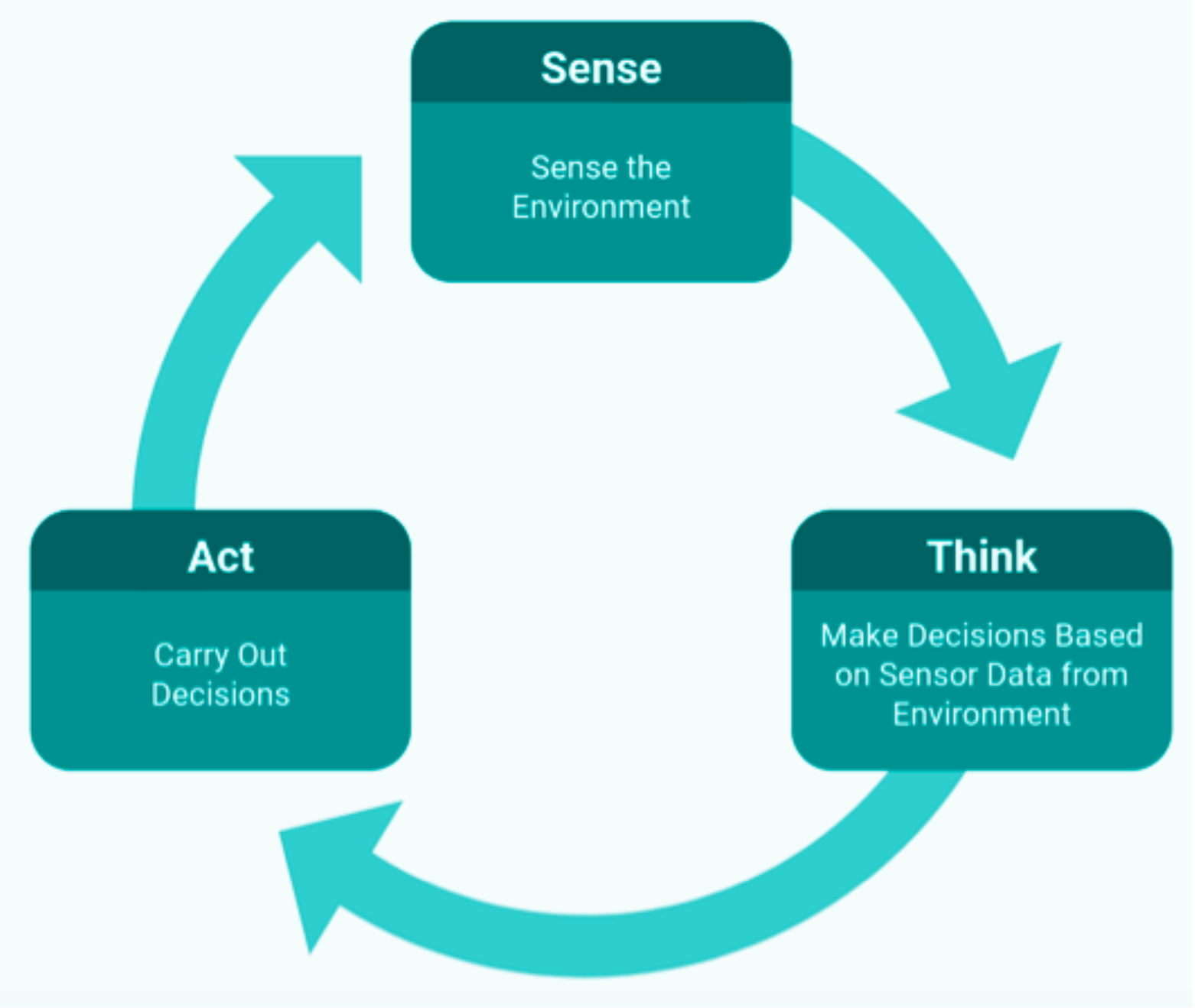
ഒരു സെൻസർ എന്നത്, സാരാംശത്തിൽ, ഒരു റോബോട്ടിനെ ചുറ്റുമുള്ള ലോകത്തെ മനസ്സിലാക്കാൻ സഹായിക്കുന്ന ഒരു ഉപകരണമാണ്. റോബോട്ടിനെ തീരുമാനങ്ങൾ എടുക്കുന്നതിനോ അല്ലെങ്കിൽ ചില പെരുമാറ്റരീതികൾ നടപ്പിലാക്കുന്നതിനോ ഒരു പ്രോജക്റ്റിൽ ഉപയോഗിക്കാൻ കഴിയുന്ന പരിസ്ഥിതിയെക്കുറിച്ചുള്ള ഡാറ്റ ശേഖരിച്ച് റിപ്പോർട്ടുചെയ്യുന്നതിലൂടെയാണ് ഇത് ഇത് ചെയ്യുന്നത്. ഈ ശ്രേണിയെ ഒരു ഇന്ദ്രിയം → ചിന്തിക്കുക → പ്രവൃത്തി തീരുമാന ലൂപ്പായി കണക്കാക്കാം.
ഈ യൂണിറ്റിൽ, കോഡ് ബേസ് ഐ സെൻസർ ഉപയോഗിച്ച് ഫീൽഡിലെ വസ്തുക്കളെ കണ്ടെത്തുകയും സുരക്ഷിതമായ ഒരു റോവർ ലാൻഡിംഗിനായി പ്രദേശം വൃത്തിയാക്കാൻ സഹായിക്കുകയും ചെയ്യും. കോഡ് ബേസിലെ ഐ സെൻസർ ഒരു വസ്തുവിന്റെ സാന്നിധ്യം സെൻസ് ആകുന്നതിനാൽ, വിദ്യാർത്ഥികൾ സൃഷ്ടിക്കുന്ന പ്രോജക്റ്റ് ഈ ലൂപ്പ് നടപ്പിലാക്കുന്നു, തുടർന്ന് ഐ സെൻസർ ഒരു വസ്തുവിനെ കണ്ടെത്തുന്നുണ്ടോ ഇല്ലയോ എന്നതിനെ അടിസ്ഥാനമാക്കി ഒരു തീരുമാനമെടുക്കാൻ VEXcode GO Think കമാൻഡ് ചെയ്യുന്നു. അപ്പോൾ കോഡ് ബേസ് ആക്ട് ആക്കി വസ്തുവിന്റെ സാന്നിധ്യം അടിസ്ഥാനമാക്കി ഡ്രൈവിംഗ് നിർത്തും.
എന്താണ് ഐ സെൻസർ?
ഐ സെൻസർഎന്നത് മൂന്ന് കാര്യങ്ങൾ നിർണ്ണയിക്കാൻ കഴിയുന്ന ഒരു സെൻസറാണ് - ഒരു വസ്തുവിന്റെ സാന്നിധ്യം, അതിന്റെ നിറം, ഒരു വസ്തുവിന്റെയോ ഉപരിതലത്തിന്റെയോ തെളിച്ചം. ഈ യൂണിറ്റിൽ, ഒരു വസ്തുവിനെ ലാൻഡിംഗ് ഏരിയയിൽ നിന്ന് നീക്കം ചെയ്യാൻ കഴിയുന്ന തരത്തിൽ അതിനെ കണ്ടെത്തുന്നതിന് ഐ സെൻസർ ഉപയോഗിക്കുന്നു. ഐ സെൻസർ റിപ്പോർട്ട് ചെയ്യുന്ന ഡാറ്റ മോണിറ്റർ കൺസോളിൽ കാണാൻ കഴിയും, ഇത് വിദ്യാർത്ഥികൾക്ക് റോബോട്ട് 'കാണുന്നതിന്റെ' ഒരു ദൃശ്യ പ്രാതിനിധ്യം നൽകുന്നു, കൂടാതെ സെൻസറുകളും റോബോട്ടിന്റെ പെരുമാറ്റങ്ങളും തമ്മിലുള്ള ബന്ധം സ്ഥാപിക്കാൻ അവരെ സഹായിക്കുന്നതിന് ഉപയോഗിക്കാം. VEXcode GO-യിൽ മോണിറ്റർ കൺസോൾ ഉപയോഗിക്കുന്നതിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, ഈ VEX ലൈബ്രറി ലേഖനം കാണുക.
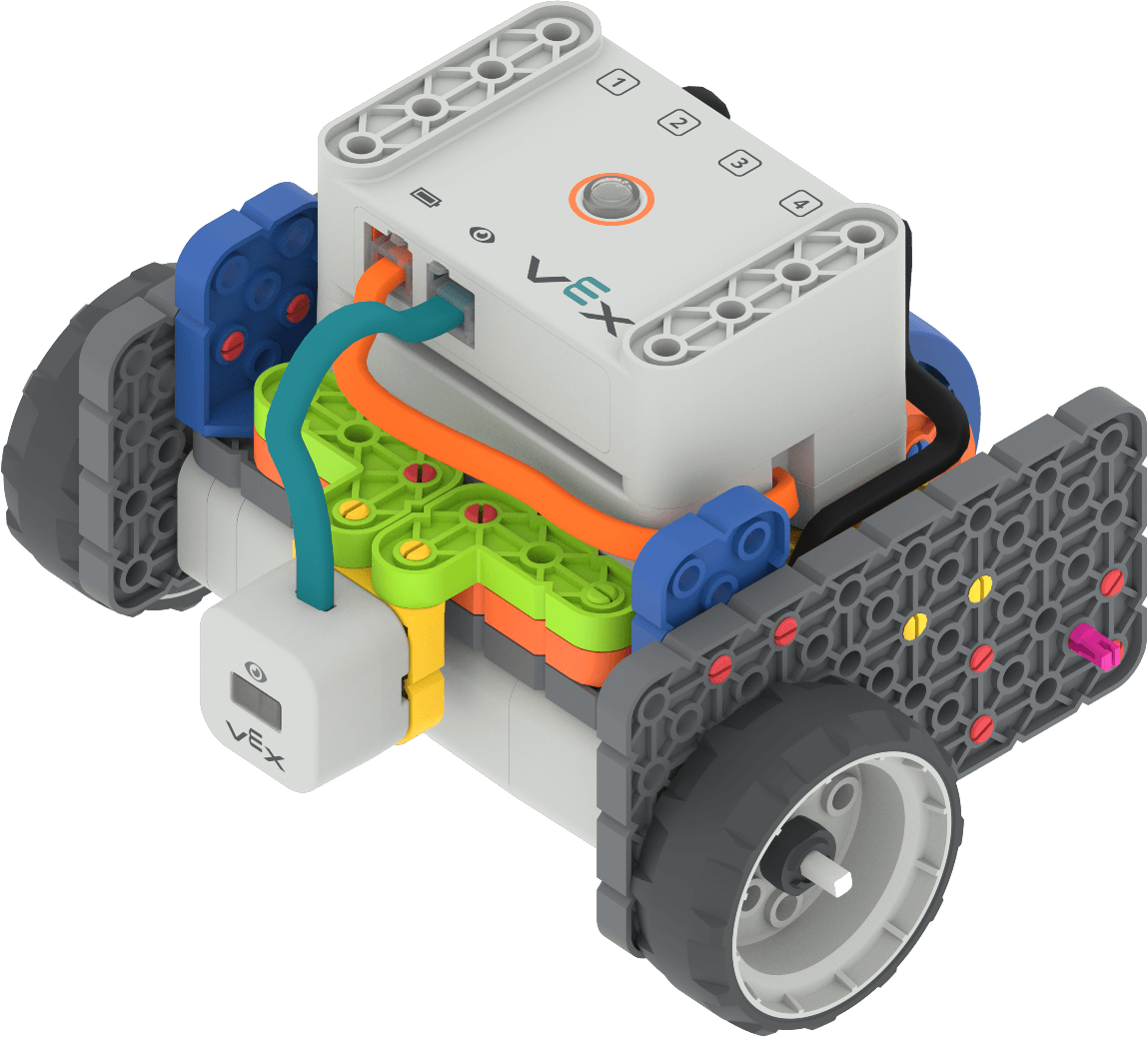
താഴെയുള്ള ചിത്രത്തിൽ കാണിച്ചിരിക്കുന്നതുപോലെ, കോഡ് ബേസിലെ ഐ സെൻസർ - ഐ ഫോർവേഡ് ബിൽഡ് മുൻവശത്താണ് സ്ഥിതി ചെയ്യുന്നത്. ഒരു വസ്തുവിന്റെ സാന്നിധ്യമോ അഭാവമോ കണ്ടെത്തുന്നതിനും അതിന്റെ നിറമോ തെളിച്ചമോ കണ്ടെത്തുന്നതിനും ഐ സെൻസർ ഉപയോഗിക്കാം.
വസ്തുക്കളെ കണ്ടെത്തുന്നതിന് ഐ സെൻസർ ഇൻഫ്രാറെഡ് രശ്മികൾ ഉപയോഗിക്കുന്നു. ഇളം നിറമുള്ള വസ്തുക്കൾ ഇൻഫ്രാറെഡ് പ്രകാശത്തെ പ്രതിഫലിപ്പിക്കുകയും ഐ സെൻസർ അവയെ കൂടുതൽ എളുപ്പത്തിൽ കണ്ടെത്തുകയും ചെയ്യുന്നു. ഇരുണ്ട നിറമുള്ള വസ്തുക്കൾ ഇൻഫ്രാറെഡ് രശ്മികളെ ആഗിരണം ചെയ്യുന്നു, ഐ സെൻസർ അവയെ അതുപോലെ കണ്ടെത്തുന്നില്ല. യൂണിറ്റ് സമയത്ത്, ഐ സെൻസറിന് ഈ വസ്തുക്കളെ കണ്ടെത്താൻ കഴിയുമെന്ന് ഉറപ്പാക്കാൻ തടസ്സങ്ങൾക്കായി വെള്ളയോ ഇളം നിറമോ ഉള്ള പേപ്പർ ഉപയോഗിക്കുക.
ഈ യൂണിറ്റിൽ, കോഡ് ബേസിന്റെ പാതയിൽ ഒരു വസ്തു ഉണ്ടെങ്കിൽ അത് കണ്ടെത്താൻ ഐ സെൻസർ ഉപയോഗിക്കും. കോഡ് ബേസിൽ ഐ സെൻസറിന്റെ സ്ഥാനം അർത്ഥമാക്കുന്നത് അതിന് നേരിട്ട് മുന്നിലുള്ള വസ്തുക്കളെ മാത്രമേ കണ്ടെത്താൻ കഴിയൂ എന്നാണ്. നിങ്ങളുടെ വിദ്യാർത്ഥികൾക്ക് മുന്നിൽ കോഡ് ബേസും തടസ്സങ്ങളും സ്ഥാപിക്കുമ്പോൾ ഇത് ശ്രദ്ധിക്കുക, അതുവഴി മെറ്റീരിയലുകൾ വിദ്യാർത്ഥികളെ വിജയത്തിലേക്ക് നയിക്കുന്നു.
ഐ സെൻസറിനെക്കുറിച്ചും അത് എങ്ങനെ പ്രവർത്തിക്കുന്നു എന്നതിനെക്കുറിച്ചുമുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, VEX GO ഐ സെൻസർVEX ലൈബ്രറിയുമായുള്ളകോഡിംഗ് എന്ന ലേഖനം കാണുക.
എന്താണ് VEXcode GO?
VEXcode GO എന്നത് VEX GO റോബോട്ടുകളുമായി ആശയവിനിമയം നടത്താൻ ഉപയോഗിക്കുന്ന ഒരു കോഡിംഗ് പരിതസ്ഥിതിയാണ്. റോബോട്ടുകളുടെ പ്രവർത്തനങ്ങൾ നിയന്ത്രിക്കുന്ന VEXcode GO പ്രോജക്ടുകൾ സൃഷ്ടിക്കാൻ വിദ്യാർത്ഥികൾ ഡ്രാഗ് ആൻഡ് ഡ്രോപ്പ് ഇന്റർഫേസ് ഉപയോഗിക്കുന്നു. ഓരോ ബ്ലോക്കിന്റെയും ഉദ്ദേശ്യം അതിന്റെ ആകൃതി, നിറം, ലേബൽ തുടങ്ങിയ ദൃശ്യ സൂചനകൾ ഉപയോഗിച്ച് തിരിച്ചറിയാൻ കഴിയും. VEXcode GO, എങ്ങനെ പ്രവർത്തിക്കാം എന്നതിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക് VEX ലൈബ്രറിലെ VEXcode GO വിഭാഗം കാണുക.
VEXcode GO-യിലെ ബ്ലോക്കുകൾ, VEXcode GO-യിൽ ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കാൻ ഉപയോഗിക്കുന്ന റോബോട്ട് കമാൻഡുകളെ പ്രതിനിധീകരിക്കുന്നു. ഈ യൂണിറ്റിൽ ഉപയോഗിക്കുന്ന പ്രധാന ബ്ലോക്കുകളുടെ ഒരു ലിസ്റ്റ് താഴെ കൊടുക്കുന്നു.
| VEXcode GO ബ്ലോക്കുകൾ | പെരുമാറ്റങ്ങൾ |
|---|---|
 |
പ്രോജക്റ്റ് ആരംഭിക്കുമ്പോൾ, {When started} ബ്ലോക്ക് ഘടിപ്പിച്ചിരിക്കുന്ന ബ്ലോക്കുകളുടെ സ്റ്റാക്ക് പ്രവർത്തിപ്പിക്കാൻ തുടങ്ങുന്നു. |
 |
[ഡ്രൈവ്] ബ്ലോക്ക് ഡ്രൈവ്ട്രെയിനിനെ മുന്നോട്ടോ പിന്നോട്ടോ എന്നെന്നേക്കുമായി നീക്കുന്നു. |
 |
[ടേൺ ഫോർ] ബ്ലോക്ക് ഒരു നിശ്ചിത ദൂരത്തേക്ക് ഡ്രൈവ്ട്രെയിൻ തിരിക്കുന്നു. |
 |
'C' യിൽ അടങ്ങിയിരിക്കുന്ന ഏതൊരു ബ്ലോക്കിനെയും [Forever] ബ്ലോക്ക് എന്നെന്നേക്കുമായി ആവർത്തിക്കുന്നു. |
 |
ഒരു പ്രോജക്റ്റിലെ അടുത്ത ബ്ലോക്കിലേക്ക് നീങ്ങുന്നതിന് മുമ്പ് [Wait] ബ്ലോക്ക് ഒരു നിശ്ചിത സമയം കാത്തിരിക്കുന്നു. |
 |
[Wait until] ബ്ലോക്ക് അതിനുള്ളിലെ അവസ്ഥ TRUE എന്ന് റിപ്പോർട്ട് ചെയ്യുന്നതുവരെ കാത്തിരിക്കുന്നു, തുടർന്ന് അടുത്ത ബ്ലോക്കിലേക്ക് നീങ്ങുന്നു. |
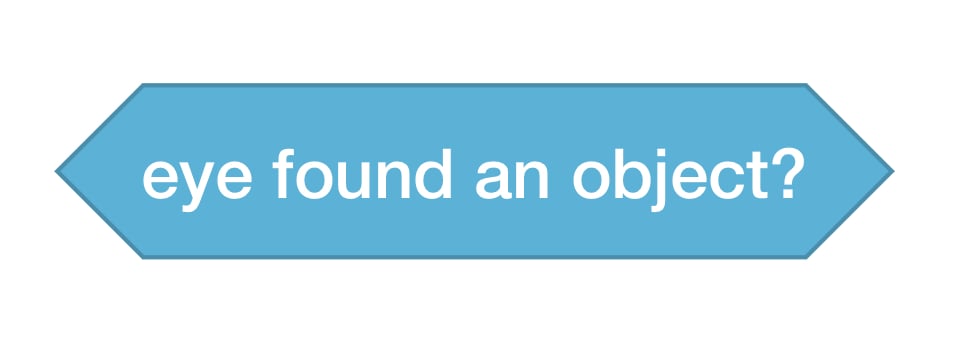 |
ഐ സെൻസർ ഒരു വസ്തുവിനെ കണ്ടെത്തിയാൽ <Found object> ബ്ലോക്ക് റിപ്പോർട്ട് ചെയ്യുന്നു. |
 |
[സ്റ്റോപ്പ് ഡ്രൈവിംഗ്] ബ്ലോക്ക് ഡ്രൈവ്ട്രെയിൻ നിർത്തുന്നു. |
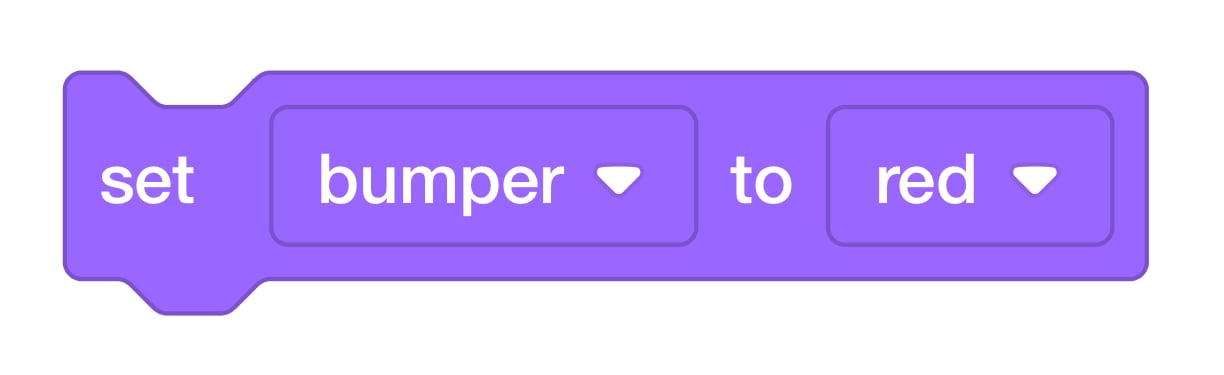 |
[സെറ്റ് ബമ്പർ കളർ] ബ്ലോക്ക് LED ബമ്പറിന്റെ നിറം സജ്ജമാക്കുന്നു. |
ഐ സെൻസറിനൊപ്പം [കാത്തിരിക്കുക] ബ്ലോക്ക് എങ്ങനെയാണ് പ്രവർത്തിക്കുന്നത്?
ഈ യൂണിറ്റിൽ, ചൊവ്വ റോവറിന്റെ ലാൻഡിംഗ് ഏരിയയിലെ തടസ്സങ്ങൾ കണ്ടെത്തുന്നതിന് വിദ്യാർത്ഥികൾ കോഡ് ബേസിലെ ഐ സെൻസർ ഉപയോഗിക്കും. ഇത് കോഡ് ചെയ്യാൻ, അവർ ഒരു പ്രോജക്റ്റിൽ [Wait until] ബ്ലോക്ക് ഉപയോഗിക്കും. [Wait until] ബ്ലോക്ക് എന്നത് ഒരു പ്രോജക്റ്റിന്റെ ഒഴുക്ക് നിയന്ത്രിക്കുന്നതിന് ഒരു അവസ്ഥ ആവർത്തിച്ച് പരിശോധിക്കുന്ന ഒരു നിയന്ത്രണ ബ്ലോക്കാണ്. [Wait until] ബ്ലോക്കിലെ അവസ്ഥ ശരിയാണെന്ന് റിപ്പോർട്ട് ചെയ്യുന്നതുവരെ ഒരു പ്രോജക്റ്റ് അടുത്ത ബ്ലോക്കിലേക്ക് നീങ്ങില്ല. ഈ യൂണിറ്റിൽ, [Wait until] ബ്ലോക്ക്<Found object> ബ്ലോക്കിനെ കൺഡീഷനാക്കി ഉപയോഗിക്കുന്നു - അതിനാൽ ഐ സെൻസർ കണ്ടെത്തി ഒബ്ജക്റ്റ് ചെയ്യുന്നതുവരെയും, <Found object> ബ്ലോക്കിന്റെ കണ്ടീഷൻ ശരിയാകുന്നതുവരെയും - പ്രോജക്റ്റിലെ അടുത്ത ബ്ലോക്കിലേക്ക് നീങ്ങുന്നതുവരെ അത് കാത്തിരിക്കും.
ഈ യൂണിറ്റിലെ [ഡ്രൈവ്] ബ്ലോക്ക് പോലെ, [വെയിറ്റ് ചെയ്യാത്ത ബ്ലോക്കുകളുമായി] [വെയിറ്റ് അൺടിൽ] ബ്ലോക്കുകൾ സംയോജിച്ച് ഉപയോഗിക്കാൻ കഴിയും, അതുവഴി കോഡ് ബേസിന് ഐ സെൻസർ ഒരു വസ്തുവിനെമുന്നോട്ട് കൊണ്ടുപോകാൻ കഴിയും. റോബോട്ട് ഒരു തടസ്സത്തിൽ ഇടിക്കുന്നത് തടയാൻ [Wait until] ബ്ലോക്ക് ഉപയോഗിക്കുന്നത് കാണാൻ താഴെയുള്ള ആനിമേഷൻ കാണുക.
നിങ്ങളുടെ റോബോട്ട് പ്രവർത്തിക്കുമ്പോൾ പ്രോജക്റ്റ് ഫ്ലോ തത്സമയം കാണാൻ, VEXcode GO-യിലെ ഹൈലൈറ്റ് ഫീച്ചർ കാണുക. പ്രോജക്റ്റിന്റെ തുടക്കത്തിൽ, [Wait until] ബ്ലോക്കിന് ചുറ്റും കണ്ടീഷൻ ശരിയാകുന്നതുവരെ പച്ച ഹൈലൈറ്റ് ദൃശ്യമാകും. ഈ കമാൻഡുകൾ വേഗത്തിൽ നടപ്പിലാക്കുന്നതിനാൽ, പച്ച ഹൈലൈറ്റ് നോൺ-വെയ്റ്റിംഗ് ബ്ലോക്കുകൾ (ഈ സാഹചര്യത്തിൽ [ഡ്രൈവ്] ബ്ലോക്ക്) ഒഴിവാക്കുന്നതായി ദൃശ്യമാകും.
ഈ യൂണിറ്റിൽ, ലാബ് പ്രവർത്തനങ്ങളും വെല്ലുവിളികളും പൂർത്തിയാക്കുന്നതിന് വിദ്യാർത്ഥികൾ അവരുടെ പ്രോജക്റ്റുകളിൽ [Wait until] ബ്ലോക്ക് പോലുള്ള വെയിറ്റിംഗ് ബ്ലോക്കുകളുടെയും [Drive] ബ്ലോക്ക് പോലുള്ള നോൺ-വെയിറ്റിംഗ് ബ്ലോക്കുകളുടെയും സംയോജനം ഉപയോഗിക്കും. VEXcode GO-യിലെ വെയ്റ്റിംഗ്, നോൺ-വെയ്റ്റിംഗ് ബ്ലോക്കുകളെക്കുറിച്ച് കൂടുതലറിയാൻ, ഈ VEX ലൈബ്രറി ലേഖനം വായിക്കുക.
ഈ യൂണിറ്റിലെ തുറന്ന വെല്ലുവിളികൾക്കായി തയ്യാറെടുക്കുന്നു
ഈ യൂണിറ്റിൽ, ഒരു വെല്ലുവിളി പരിഹരിക്കുന്നതിനുള്ള ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കാൻ മുമ്പ് പഠിച്ച കാര്യങ്ങൾ ഉപയോഗിക്കാൻ വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെടും. വിദ്യാർത്ഥികളെ പ്രശ്നപരിഹാരത്തിന് നിരന്തരം വെല്ലുവിളിക്കേണ്ടതും അവർ പഠിച്ചുവരുന്ന കഴിവുകൾ പുതിയ രീതിയിൽ പ്രയോഗിക്കേണ്ടതും പ്രധാനമായതിനാൽ, നിങ്ങളുടെ വിദ്യാർത്ഥികളെ വെല്ലുവിളിക്കാനും ഈ തന്ത്രങ്ങൾ ഉപയോഗിച്ച് പ്രതിരോധശേഷി വളർത്താനും വെല്ലുവിളികളെ മറികടക്കാൻ അവരെ നയിക്കാനും ഞങ്ങൾ നിങ്ങളെ പ്രോത്സാഹിപ്പിക്കുന്നു. വിദ്യാർത്ഥികൾ അവരുടെ പ്രോജക്ടുകളിൽ പരീക്ഷണം നടത്തുമ്പോൾ അവരെ സഹായിക്കുന്നതിനുള്ള ചില നിർദ്ദേശങ്ങൾ ഇതാ:
പരിഹാരം നൽകാതെ ഫീഡ്ബാക്ക് നൽകുക -ഒരു വെല്ലുവിളിയെ നേരിടുമ്പോൾ തെറ്റുകൾ വരുത്തുന്നത് പ്രതീക്ഷിക്കുകയും പ്രോത്സാഹിപ്പിക്കുകയും ചെയ്യുന്നു. "പഠനത്തിലെ പിഴവുകൾ അവസരങ്ങൾ സൃഷ്ടിക്കും, [കൂടാതെ] ബന്ധങ്ങൾ സാക്ഷാത്കരിക്കാനും സഹായിക്കും."1 നിങ്ങളുടെ വിദ്യാർത്ഥികളുമായി പരിചിതമായ ഒരു പ്രശ്നപരിഹാര പ്രക്രിയ സൃഷ്ടിക്കുന്നത്, ഒരു പ്രശ്നം എങ്ങനെ തിരിച്ചറിയാമെന്നും അവർ ഒരു തെറ്റ് വരുത്തുമ്പോൾ മുന്നോട്ട് പോകാമെന്നും പഠിക്കാൻ അവരെ സഹായിക്കും, അതുവഴി തടസ്സങ്ങളും നിരാശയും കുറയ്ക്കും. നിങ്ങളുടെ വിദ്യാർത്ഥികളുടെ പ്രോജക്ടുകൾ പരിഹരിക്കുന്നതിനും അവരുടേതായ പരിഹാരങ്ങൾ കണ്ടെത്തുന്നതിനും സഹായിക്കുന്നതിന് ഇനിപ്പറയുന്ന പ്രശ്നപരിഹാര ചക്രം പരീക്ഷിച്ചുനോക്കൂ.
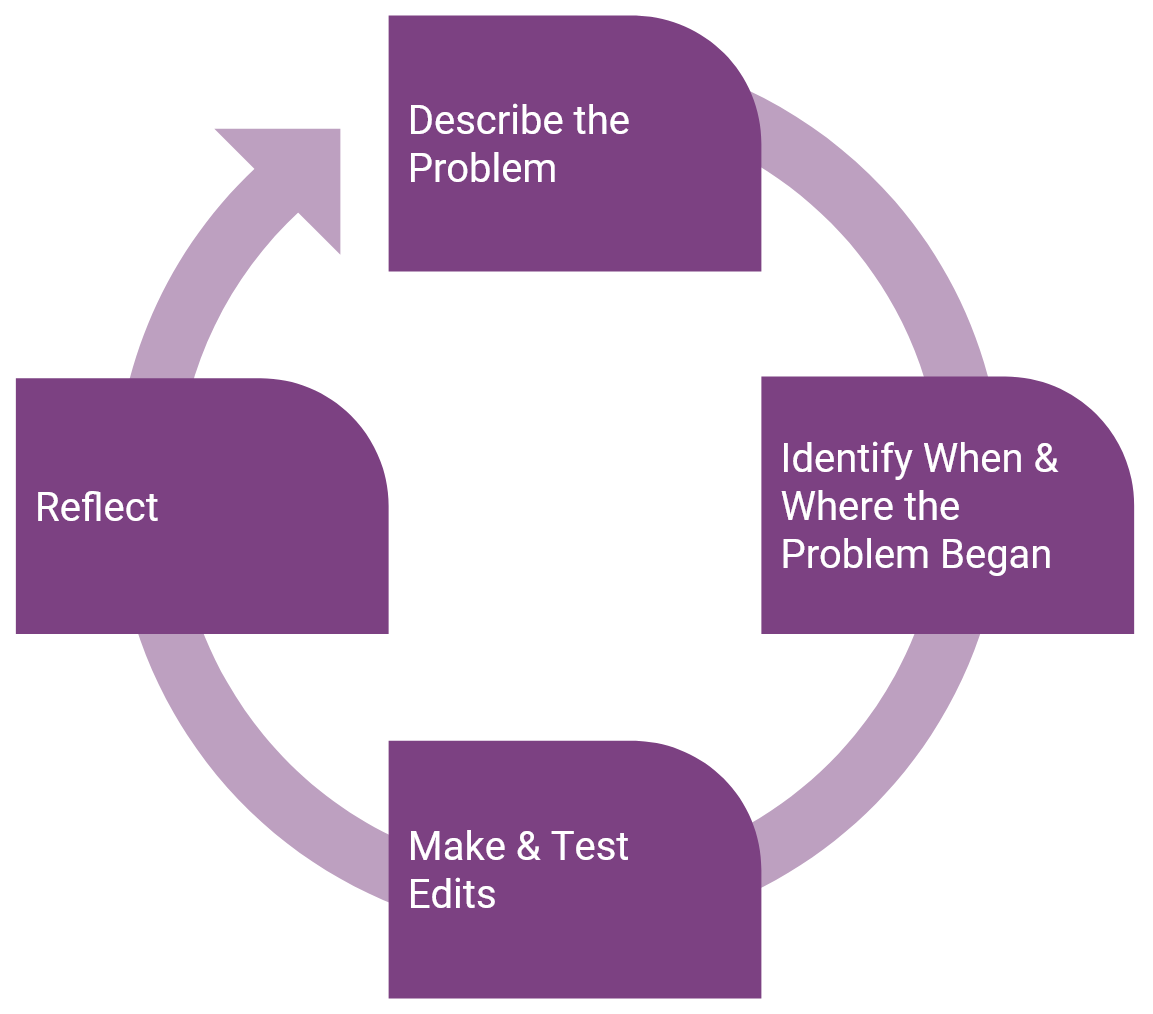
- പ്രശ്നം വിവരിക്കുക
- എന്താണ് തെറ്റ് എന്ന് വിശദീകരിക്കാൻ വിദ്യാർത്ഥിയോട് ആവശ്യപ്പെടുക. വിദ്യാർത്ഥികൾക്ക് തങ്ങളുടെ തെറ്റിനെ പൊതുവായ ലക്ഷ്യവുമായോ അല്ലെങ്കിൽ നിലവിലുള്ള വെല്ലുവിളിയുമായോ ബന്ധപ്പെടുത്താൻ കഴിയണം.
- അവരുടെ പ്രോജക്റ്റിൽ കോഡ് ബേസ് എങ്ങനെയാണ് നീങ്ങുന്നത്? റോബോട്ട് എങ്ങനെ ആയിരിക്കണം നീങ്ങുന്നത്?
- എന്താണ് തെറ്റ് എന്ന് വിശദീകരിക്കാൻ വിദ്യാർത്ഥിയോട് ആവശ്യപ്പെടുക. വിദ്യാർത്ഥികൾക്ക് തങ്ങളുടെ തെറ്റിനെ പൊതുവായ ലക്ഷ്യവുമായോ അല്ലെങ്കിൽ നിലവിലുള്ള വെല്ലുവിളിയുമായോ ബന്ധപ്പെടുത്താൻ കഴിയണം.
- പ്രശ്നം എപ്പോൾ, എവിടെയാണ് ആരംഭിച്ചതെന്ന് തിരിച്ചറിയുക
- വിദ്യാർത്ഥിയോട് ആദ്യം പ്രശ്നം ശ്രദ്ധിച്ചത് എപ്പോഴാണെന്ന് ചോദിക്കുക.
- പദ്ധതിയുടെ ഏത് ഭാഗമാണ് നടപ്പിലാക്കിയത്?
- പ്രോജക്റ്റിൽ എവിടെയാണ് പിശക് സംഭവിച്ചതെന്ന് കണ്ടെത്താൻ വിദ്യാർത്ഥികൾക്ക് ബുദ്ധിമുട്ടുണ്ടെങ്കിൽ, VEXcode GO-യിലെ പ്രോജക്റ്റ് സ്റ്റെപ്പിംഗ് സവിശേഷത ഉപയോഗിക്കാൻ അവരെ പ്രോത്സാഹിപ്പിക്കുക. പ്രോജക്റ്റ് സ്റ്റെപ്പിംഗ് സവിശേഷതയ്ക്കൊപ്പം നൽകിയിരിക്കുന്ന ദൃശ്യ സൂചനകൾ ഉപയോഗിച്ച്, വിദ്യാർത്ഥികൾക്ക് അവരുടെ പ്രോജക്റ്റിലെ പ്രശ്നങ്ങൾ പരിഹരിക്കാൻ സഹായിക്കാനാകും, ഇത് ബ്ലോക്കുകൾ ഓരോന്നായി നടപ്പിലാക്കുന്നത് കാണാനുള്ള കഴിവുണ്ടാക്കുന്നു. ഏതൊക്കെ ബ്ലോക്കുകളാണ് പിശകിന് കാരണമാകുന്നതെന്ന് ഇത് അവർക്ക് മികച്ച ഒരു ദൃശ്യപരത നൽകും, അതിനാൽ ഡീബഗ്ഗിംഗ് കൂടുതൽ ലക്ഷ്യബോധമുള്ളതും കാര്യക്ഷമവുമായ പ്രക്രിയയായി മാറും. പ്രോജക്റ്റ് സ്റ്റെപ്പിംഗ് ഫീച്ചർ എങ്ങനെ ഉപയോഗിക്കാം എന്നതിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, VEXcode-ൽ ഒരു പ്രോജക്റ്റിലൂടെയുള്ള സ്റ്റെപ്പിംഗ് GO VEX ലൈബ്രറി ആർട്ടിക്കിൾ കാണുക.
- വിദ്യാർത്ഥിയോട് ആദ്യം പ്രശ്നം ശ്രദ്ധിച്ചത് എപ്പോഴാണെന്ന് ചോദിക്കുക.
- & ടെസ്റ്റ് എഡിറ്റുകൾ വരുത്തുക
- വിദ്യാർത്ഥികൾ ഒരു പിശക് കണ്ടെത്തുമ്പോൾ, അവർ അവരുടെ പ്രോജക്റ്റിൽ എഡിറ്റുകൾ വരുത്തണം. ഓരോ എഡിറ്റിംഗിലും വിദ്യാർത്ഥികൾക്ക് പ്രോജക്റ്റ് പരീക്ഷിക്കാൻ കഴിയും. പദ്ധതി വിജയകരമാണെങ്കിൽ, അവർക്ക് പ്രശ്നപരിഹാര ചക്രത്തിലെ അടുത്ത ഘട്ടത്തിലേക്ക് പോകാം. പദ്ധതി വിജയിച്ചില്ലെങ്കിൽ, അവർക്ക് പ്രക്രിയയുടെ തുടക്കത്തിലേക്ക് തിരിച്ചുപോയി വീണ്ടും ശ്രമിക്കാം.
- പ്രതിഫലിപ്പിക്കുക
- ഈ പ്രക്രിയയിൽ അവർ വരുത്തിയ തെറ്റും അത് മറികടന്ന തെറ്റും എന്താണെന്ന് ചിന്തിക്കാൻ വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെടുക.
- എന്തായിരുന്നു തെറ്റ്? ഈ തെറ്റിൽ നിന്ന് നിങ്ങൾ എന്താണ് പഠിച്ചത്? അടുത്ത തവണ കോഡ് ബേസ് കോഡ് ചെയ്യുമ്പോൾ ഇത് നിങ്ങളെ എങ്ങനെ സഹായിക്കും?
- വളർച്ചാ മനോഭാവം വളർത്താൻ സഹായിക്കുന്നതിന്, വിദ്യാർത്ഥികൾക്ക് അവരുടെ തെറ്റുകൾ തിരിച്ചറിയാനും പ്രക്രിയയിൽ നിന്ന് അവർ എന്താണ് പഠിച്ചതെന്നും പ്രോത്സാഹിപ്പിക്കുക. വളർച്ചാ മനോഭാവത്തിന് ശക്തമായ ഊന്നൽ നൽകുന്നത്, എപ്പോൾ, എങ്ങനെ സ്ഥിരത പുലർത്തണമെന്നും എപ്പോൾ സഹായം ചോദിക്കണമെന്നും പഠിക്കാൻ വിദ്യാർത്ഥികളെ സഹായിക്കും.2വിദ്യാർത്ഥികൾക്ക് അവരുടെ പ്രക്രിയയെ പുതിയ പഠനത്തിന്റെ മുന്നോടിയായി കാണാൻ കഴിയുമെങ്കിൽ, അവർക്ക് ഇവിടെയുള്ള ഘട്ടങ്ങൾ ഉപയോഗിച്ച് സ്വന്തം പഠനം മുന്നോട്ട് കൊണ്ടുപോകാനും സഹപാഠികളുടെ പഠനം മുന്നോട്ട് കൊണ്ടുപോകാനും കഴിയും. വിദ്യാർത്ഥികൾ ഇത്തരം പ്രശ്നങ്ങൾ നേരിടുകയും അവരുടെ തെറ്റുകളെക്കുറിച്ച് ചിന്തിക്കുകയും ചെയ്യുമ്പോൾ, അവരുടെ തെറ്റുകൾ പങ്കുവെക്കാനും സഹ വിദ്യാർത്ഥികളുമായി അവ പരിഹരിക്കാനും അവരെ പ്രോത്സാഹിപ്പിക്കുക. ഈ രീതിയിൽ, വിദ്യാർത്ഥികൾക്ക് "പരസ്പരം പഠന സ്രോതസ്സുകളായി" മാറാൻ കഴിയും.3
- ഈ പ്രക്രിയയിൽ അവർ വരുത്തിയ തെറ്റും അത് മറികടന്ന തെറ്റും എന്താണെന്ന് ചിന്തിക്കാൻ വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെടുക.
ക്ലിയർ ദി ലാൻഡിംഗ് ഏരിയ (ലാബ് 2) രൂപകൽപ്പന ചെയ്തിരിക്കുന്നത് ഒരു തുറന്ന പര്യവേക്ഷണമായിട്ടാണ്, അത് നിങ്ങളുടെ വിദ്യാർത്ഥികളോട് ഒരു വെല്ലുവിളി പരിഹരിക്കാൻ സ്ഥിരോത്സാഹം കാണിക്കാൻ പ്രേരിപ്പിക്കും. ഈ ലാബിൽ, ഞങ്ങൾ [Forever] ബ്ലോക്കിനൊപ്പം ലൂപ്പുകൾ പരിചയപ്പെടുത്തുന്നു, കൂടാതെ ലാൻഡിംഗ് ഏരിയയിലെ (GO ഫീൽഡ്) എല്ലാ തടസ്സങ്ങളും കണ്ടെത്തുന്നതിനും കോഡ് ബേസ് ഡ്രൈവ് ചെയ്യുന്നതിനും അവരുടെ പ്രോജക്റ്റിൽ ലൂപ്പുകൾ ഉപയോഗിച്ച് പരീക്ഷണം നടത്താൻ വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെടുന്നു. ഒരു പ്രോജക്റ്റിൽ ലൂപ്പുകൾ ഉപയോഗിക്കുന്നത് നിങ്ങളുടെ വിദ്യാർത്ഥികൾക്ക് പുതിയതാണെങ്കിൽ, ലൂപ്പുകൾ ഫലപ്രദമായി ഉപയോഗിക്കുന്നതിന് അവരുടെ പ്രോജക്റ്റുകളുടെ നിരവധി ആവർത്തനങ്ങൾ ആവശ്യമായി വന്നേക്കാം. ഈ വിഭാഗത്തിൽ വിവരിച്ചിരിക്കുന്ന നിർദ്ദേശങ്ങൾ ഉപയോഗിച്ച് വിദ്യാർത്ഥികളെ ട്രയൽ ആൻഡ് എറർ പ്രക്രിയയ്ക്ക് സജ്ജമാക്കുക, കൂടാതെ വെല്ലുവിളിയുടെ ലക്ഷ്യം നേടുന്നതിന് അവരുടെ പ്രോജക്റ്റുകൾ പരിഹരിക്കാൻ അവരെ സഹായിക്കുക. ലാബ് 2 വെല്ലുവിളിയിലൂടെ വിദ്യാർത്ഥികളെ നയിക്കുന്നതിനുള്ള അധിക നിർദ്ദേശ പിന്തുണകൾ പ്ലേ പാർട്ട് 1, 2 ലെ ഫെസിലിറ്റേഷൻ വിഭാഗത്തിൽ അടങ്ങിയിരിക്കുന്നു. ഈ ലാബിൽ ആവശ്യമായ പ്രശ്നപരിഹാരത്തിനും പരീക്ഷണത്തിനും പിഴവുകൾക്കും പിന്തുണ നൽകുന്നതിനുള്ള ഒരു പദ്ധതി ഉണ്ടായിരിക്കുന്നത് നിങ്ങളുടെ വിദ്യാർത്ഥികളുടെ വ്യക്തിഗത ആവശ്യങ്ങൾ നിറവേറ്റാൻ നിങ്ങളെ സഹായിക്കും.
STEM ലാബുകളിലൂടെ പ്രവർത്തിക്കുമ്പോൾ വിദ്യാർത്ഥികളിൽ പ്രതിരോധശേഷിയും വളർച്ചാ മനോഭാവവും വളർത്തിയെടുക്കാൻ ഫലപ്രദമായ ഫീഡ്ബാക്ക് എങ്ങനെ സഹായിക്കുമെന്നതിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക് STEM ലാബുകളിലെ ബിൽഡിംഗ് റെസിലിയൻസ് VEX ലൈബ്രറി ലേഖനം കാണുക.
1 ഹാറ്റി, ജോൺ, ഷേർലി ക്ലാർക്ക്. ദൃശ്യമായ പഠനം: ഫീഡ്ബാക്ക്. റൂട്ട്ലെഡ്ജ്, ടെയ്ലർ & ഫ്രാൻസിസ് ഗ്രൂപ്പ്, 2019.
2 അതേ.
3 അതേ, പേജ് 121