
Latar belakang
Unit Tantangan Pendaratan Mars Rover akan menantang siswa Anda untuk membangun proyek VEXcode GO untuk memecahkan suatu masalah. Unit ini memperkenalkan siswa pada penggunaan Sensor Mata di bagian depan Basis Kode dalam sebuah tantangan, yang terinspirasi oleh proses yang digunakan ilmuwan saat mencoba mendaratkan pesawat ruang angkasa, seperti penjelajah Mars 2020 Perseverance. Siswa akan mengkodekan Basis Kode untuk mendeteksi rintangan, lalu berhenti mengemudi untuk menunjukkan rintangan ditemukan di lokasi pendaratan.
Misi Mars 2020 NASA
Misi Mars 2020 NASA membahas tujuan sains berprioritas tinggi untuk eksplorasi Mars: kehidupan, iklim, geologi, dan manusia. Namun sebelum penjelajah Perseverance dapat memulai misinya mengumpulkan sampel batuan dan tanah di permukaan, penjelajah tersebut perlu mendarat dengan selamat di Planet Merah.
Menurut NASA, hanya sekitar 40% misi yang pernah dikirim ke Mars (oleh badan antariksa mana pun) yang berhasil. Seluruh proses Masuk, Turun, dan Mendarat hanya akan memakan waktu beberapa menit, tetapi pesawat antariksa yang membawa penjelajah Perseverance perlu memperlambat kecepatan dari hampir 20.000 km per jam (~12.500 mil per jam) ke nol dan mencari area terbuka dan datar untuk mendarat. Permukaan Mars penuh dengan rintangan — kawah tumbukan besar, tebing, retakan, dan bongkahan batu bergerigi. Angin yang tidak dapat diprediksi juga dapat menimbulkan komplikasi lebih lanjut.

Untuk membantu memastikan pendaratan yang aman, penjelajah Perseverance akan mengambil gambar saat turun dan membandingkan gambar tersebut dengan peta. Ia dapat dengan cepat memutuskan apakah area itu ditetapkan berbahaya oleh para ilmuwan, dan membuat penyesuaian untuk mendarat di area terbuka. Saksikan animasi di bawah ini untuk lebih memahami proses pengambilan keputusan penjelajah menggunakan foto penurunan.
Dalam Unit ini, siswa akan membuat kode Basis Kode untuk mendeteksi hambatan di lokasi pendaratan di Lapangan mereka untuk membantu memastikan pendaratan yang aman bagi penjelajah.
Apa itu sensor?
Sensor pada hakikatnya adalah perangkat yang membantu robot memahami dunia di sekelilingnya. Hal ini dilakukan dengan mengumpulkan dan melaporkan data tentang lingkungannya, yang kemudian dapat digunakan dalam suatu proyek untuk membuat robot mengambil keputusan, atau melakukan perilaku tertentu. Urutan ini dapat dianggap sebagai siklus keputusan Rasakan → Pikirkan → Bertindak.
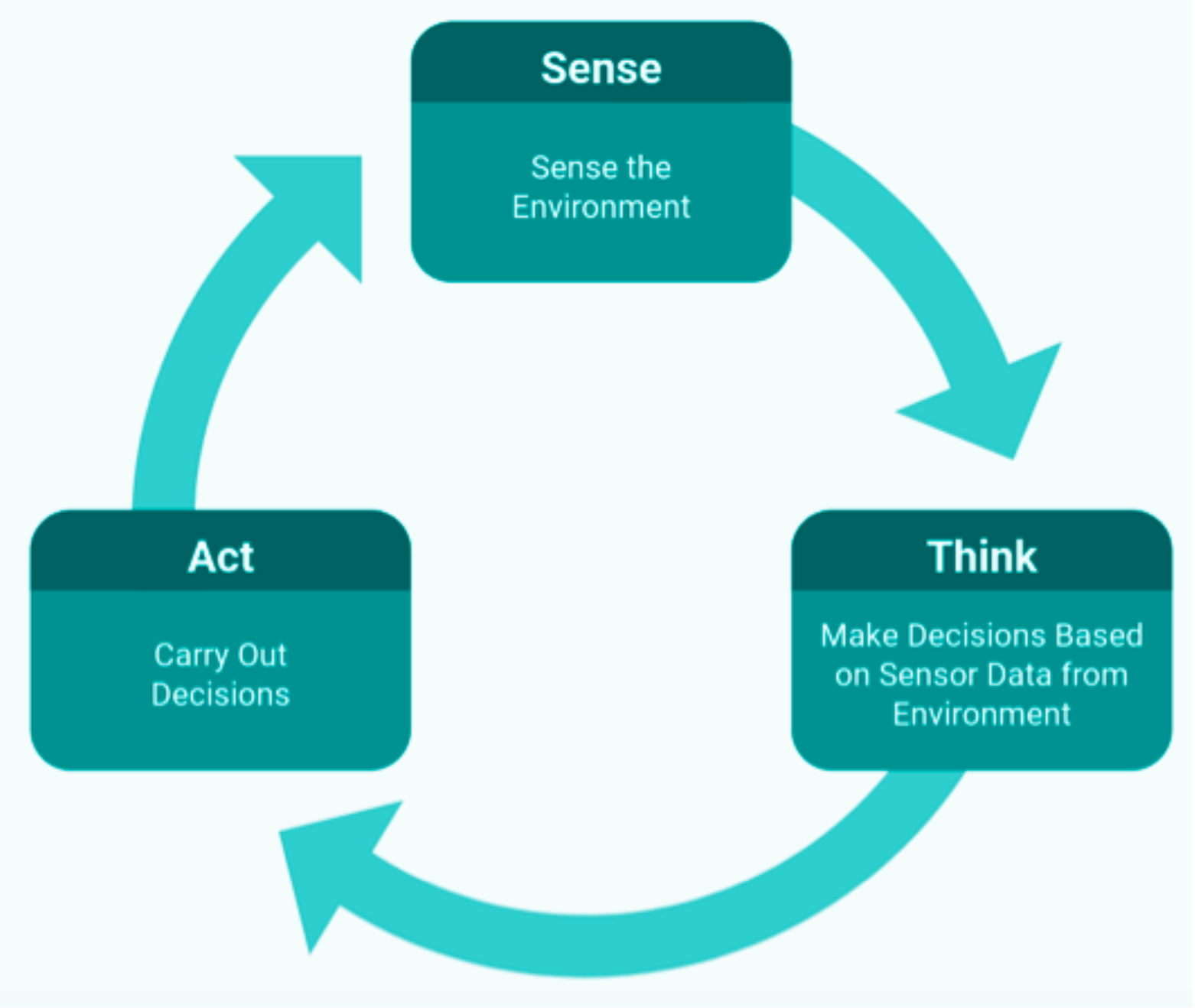
Dalam Unit ini, Basis Kode akan menggunakan Sensor Mata untuk mendeteksi objek di Lapangan guna membantu membersihkan area untuk pendaratan wahana penjelajah yang aman. Proyek yang dibuat oleh mahasiswa menjalankan putaran ini karena Sensor Mata pada Basis Kode akan Merasakan kehadiran sebuah objek, kemudian VEXcode GO memerintahkan Berpikir untuk membuat keputusan berdasarkan apakah Sensor Mata mendeteksi sebuah objek atau tidak. Kemudian Basis Kode akan Tindakan dan menghentikan pengendaraan berdasarkan keberadaan objek.
Apa itu Sensor Mata?
Sensor Mataadalah sensor yang dapat menentukan tiga hal - keberadaan suatu objek, warnanya, dan kecerahan suatu objek atau permukaan. Pada Unit ini, Sensor Mata digunakan untuk mendeteksi objek sehingga dapat dibersihkan dari area pendaratan. Data yang dilaporkan oleh Sensor Mata dapat dilihat di Monitor Console, yang menawarkan kepada siswa representasi visual tentang apa yang 'dilihat' robot, dan dapat digunakan untuk membantu mereka membuat hubungan antara sensor dan perilaku robot. Untuk informasi lebih lanjut tentang penggunaan Monitor Console di VEXcode GO, lihat artikel VEX Library ini.
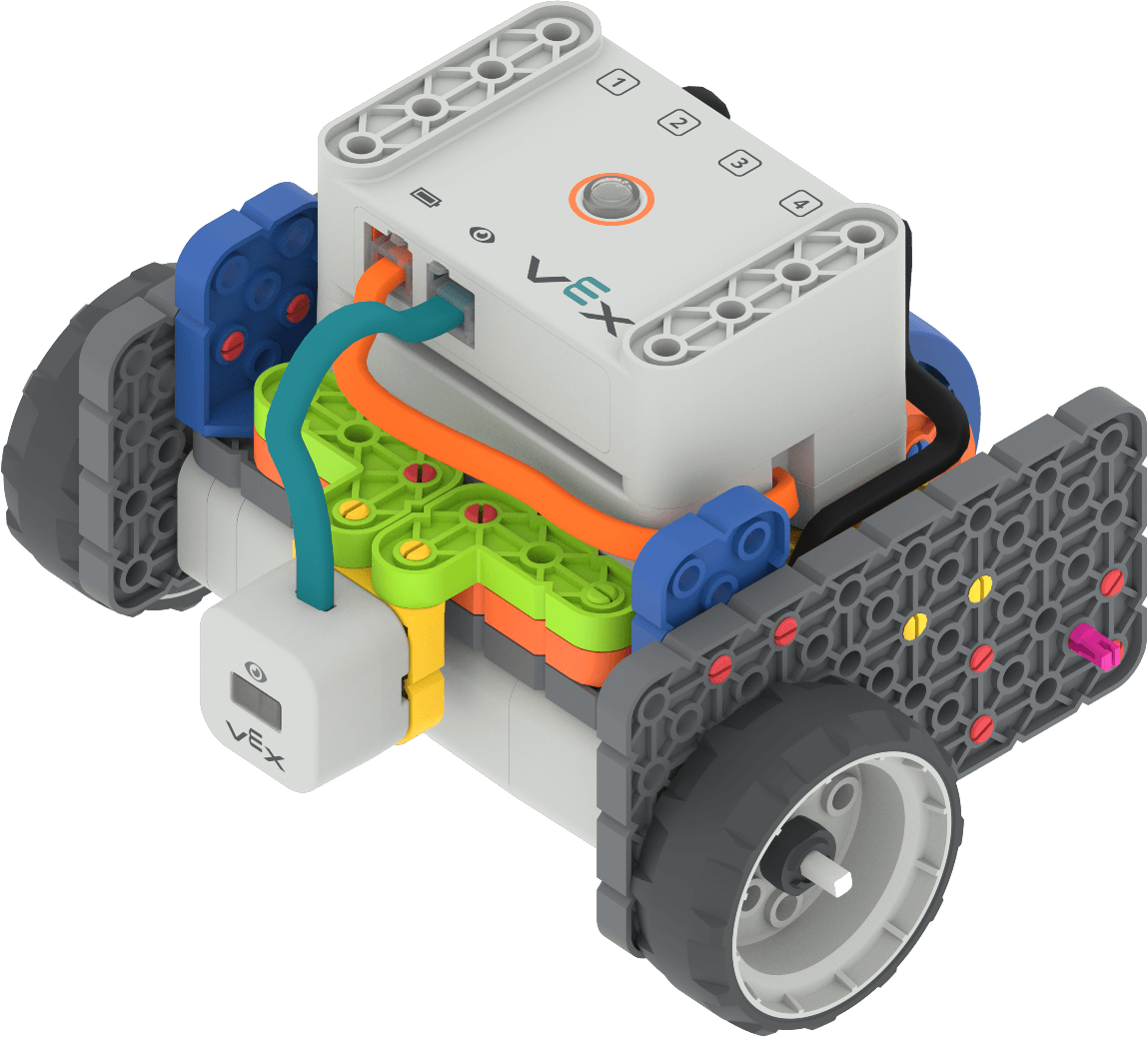
Sensor Mata pada Basis Kode - versi Eye Forward terletak di sisi yang menghadap depan, seperti yang ditunjukkan pada gambar di bawah. Sensor Mata dapat digunakan untuk mendeteksi ada atau tidaknya suatu objek, serta warna atau tingkat kecerahannya.
Sensor Mata menggunakan cahaya inframerah untuk mendeteksi objek. Objek berwarna terang memantulkan cahaya inframerah dan lebih mudah dideteksi oleh Sensor Mata. Objek berwarna gelap menyerap cahaya inframerah dan Sensor Mata tidak mendeteksinya dengan baik. Selama Unit, gunakan kertas putih atau berwarna terang untuk rintangan untuk memastikan bahwa Sensor Mata akan mampu mendeteksi objek ini.
Dalam Unit ini, Sensor Mata akan digunakan untuk mendeteksi saat suatu objek hadir di jalur Basis Kode. Posisi Sensor Mata pada Basis Kode berarti ia hanya dapat mendeteksi objek langsung di depannya. Perhatikan hal ini saat Anda menempatkan Basis Kode dan rintangan bersama siswa Anda sehingga materi tersebut mempersiapkan siswa untuk meraih keberhasilan.
Untuk informasi lebih lanjut tentang Sensor Mata dan cara kerjanya, lihat artikelPengodean dengan VEX GO Eye SensorVEX Library.
Apa itu VEXcode GO?
VEXcode GO adalah lingkungan pengkodean yang digunakan untuk berkomunikasi dengan robot VEX GO. Siswa menggunakan antarmuka seret dan lepas untuk membuat proyek VEXcode GO yang mengendalikan tindakan robot mereka. Tujuan setiap blok dapat diidentifikasi menggunakan isyarat visual seperti bentuk, warna, dan labelnya. Untuk informasi lebih lanjut tentang cara bekerja dengan VEXcode GO, lihat Bagian VEXcode GO di Pustaka VEX.
Blok dalam VEXcode GO mewakili perintah robot yang digunakan untuk membuat proyek di VEXcode GO. Berikut adalah daftar blok utama yang digunakan selama Unit ini.
| Blok VEXcode GO | Perilaku |
|---|---|
 |
Blok {When started} mulai menjalankan tumpukan blok terlampir saat proyek dimulai. |
 |
Blok [Drive] menggerakkan Drivetrain maju atau mundur selamanya. |
 |
Blok [Putar selama] memutar Drivetrain untuk jarak tertentu. |
 |
Blok [Forever] mengulang blok apa pun yang ada di dalam 'C' selamanya. |
 |
Blok [Tunggu] menunggu selama jangka waktu tertentu sebelum berpindah ke blok berikutnya dalam suatu proyek. |
 |
Blok [Tunggu sampai] menunggu kondisi di dalamnya melaporkan BENAR sebelum berpindah ke blok berikutnya. |
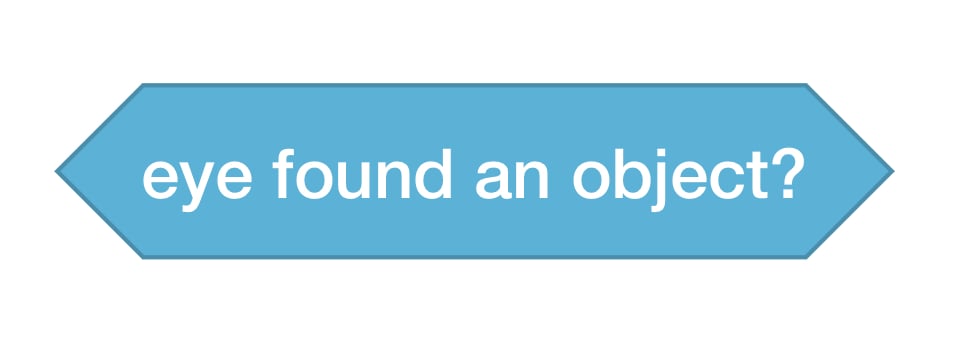 |
Blok <Found object> melaporkan jika Sensor Mata mendeteksi suatu objek. |
 |
Blok [Berhenti mengemudi] menghentikan Drivetrain. |
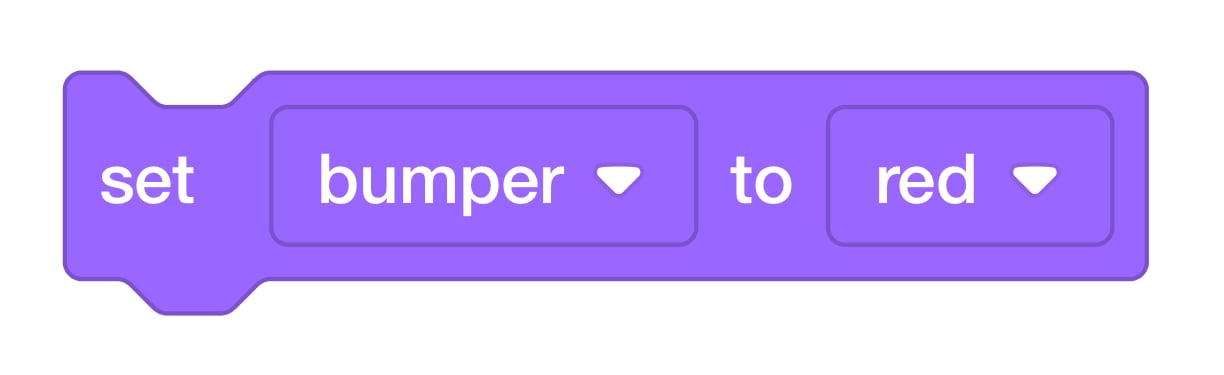 |
Blok [Set bumper color] mengatur warna LED Bumper. |
Bagaimana cara kerja blok [Tunggu hingga] dengan Sensor Mata?
Dalam Unit ini, siswa akan menggunakan Sensor Mata pada Basis Kode untuk mendeteksi hambatan di area pendaratan penjelajah Mars. Untuk mengkodekan ini, mereka akan menggunakan blok [Tunggu sampai] dalam suatu proyek. Blok [Tunggu hingga] adalah blok Kontrol yang berulang kali memeriksa kondisi untuk mengendalikan aliran proyek. Suatu proyek tidak akan berpindah ke blok berikutnya sampai kondisi di blok [Tunggu sampai] dilaporkan sebagai benar. Dalam Unit ini, blok [Tunggu hingga] digunakan dengan blok<Found object> sebagai kondisinya - sehingga akan menunggu hingga Sensor Mata mendeteksi dan objek, dan kondisi blok <Found object> benar - untuk beralih ke blok berikutnya dalam proyek.
Blok [Tunggu hingga] dapat digunakan bersama dengan blok yang tidak menunggu, seperti blok [Berkendara] dalam Unit ini, sehingga Basis Kode dapat melaju majuhinggaSensor Mata mendeteksi suatu objek. Tonton animasi di bawah untuk melihat blok [Tunggu hingga] digunakan untuk menghentikan robot menabrak rintangan.
Untuk melihat alur proyek secara real time saat robot Anda berjalan, lihat Fitur Sorotan di VEXcode GO. Pada awal proyek, sorotan hijau akan muncul di sekitar blok [Tunggu hingga] hingga kondisinya benar. Sorotan hijau akan muncul untuk melewati blok yang tidak menunggu (dalam kasus ini blok [Drive]) karena perintah ini dieksekusi dengan cepat.
Dalam Unit ini, siswa akan menggunakan kombinasi blok menunggu, seperti blok [Tunggu sampai], dan blok tidak menunggu, seperti blok [Berkendara], dalam proyek mereka untuk menyelesaikan aktivitas dan tantangan Lab. Untuk mempelajari lebih lanjut tentang blok menunggu dan tidak menunggu di VEXcode GO, baca artikel Perpustakaan VEX ini.
Mempersiapkan Tantangan Terbuka di Unit Ini
Dalam Unit ini, siswa akan diminta untuk menggunakan apa yang telah mereka pelajari sebelumnya untuk membuat proyek guna memecahkan tantangan. Karena penting untuk secara teratur menantang siswa untuk memecahkan masalah dan menerapkan keterampilan yang telah mereka pelajari dengan cara baru, kami mendorong Anda untuk menantang siswa Anda dan menggunakan strategi ini untuk membangun ketahanan dan membantu membimbing mereka melalui tantangan tersebut. Berikut adalah beberapa saran untuk membantu siswa saat mereka bereksperimen dengan proyek mereka:
Berikan umpan balik tanpa memberikan solusi -Membuat kesalahan saat mengerjakan tantangan diharapkan dan didorong. “Kesalahan dalam pembelajaran dapat menciptakan peluang, [dan] dapat membantu mewujudkan hubungan.”1 Menciptakan proses pemecahan masalah yang familiar dengan siswa Anda dapat membantu mereka mempelajari cara mengidentifikasi masalah dan bergerak maju ketika mereka melakukan kesalahan, sehingga meminimalkan gangguan dan frustrasi. Cobalah menggunakan siklus pemecahan masalah berikut dengan siswa Anda untuk membantu mereka memecahkan masalah proyek mereka dan menemukan solusi mereka sendiri.
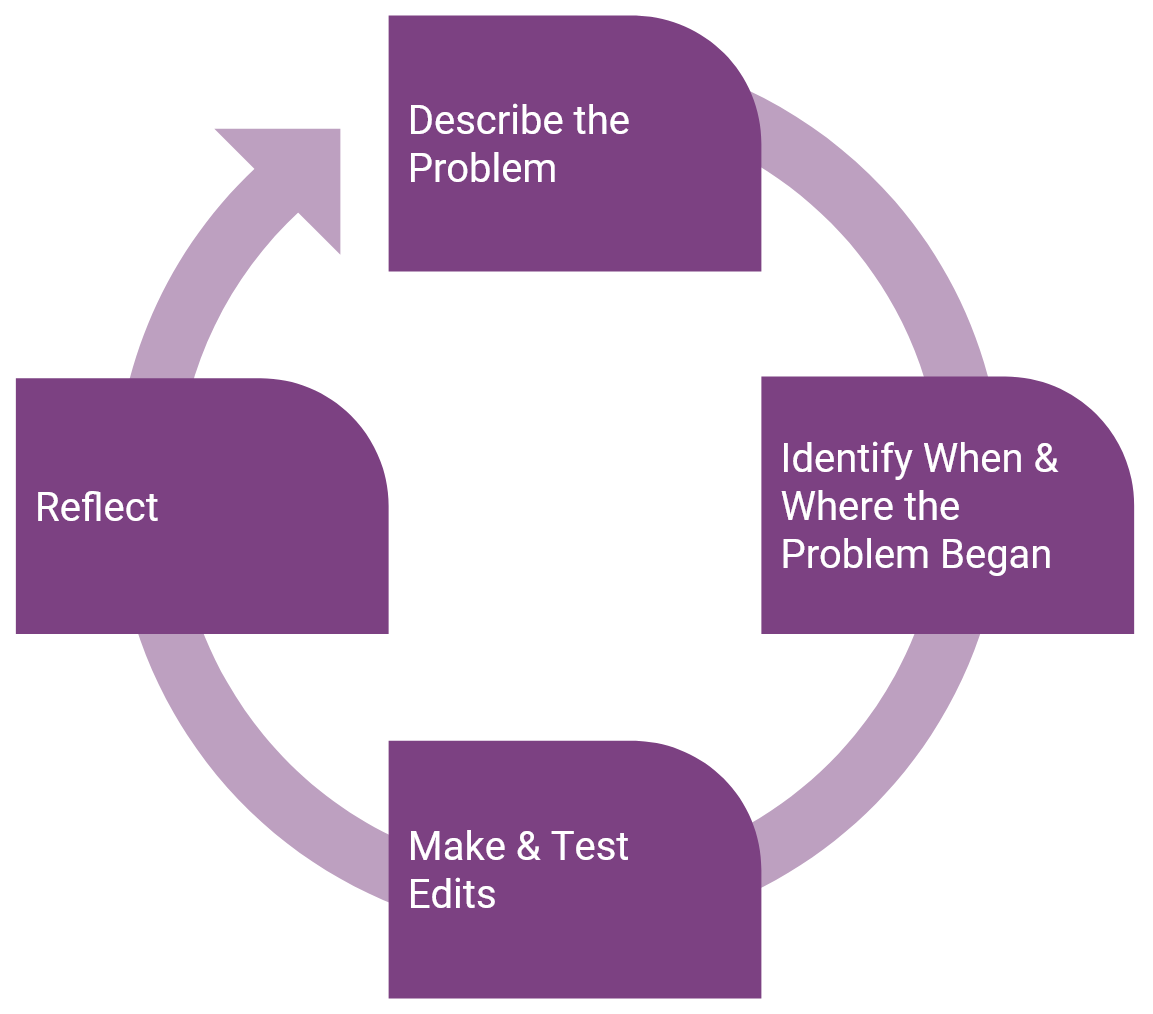
- Jelaskan Masalahnya
- Minta siswa untuk menjelaskan apa yang salah. Siswa harus mampu menghubungkan kesalahan kembali dengan tujuan bersama atau tantangan yang dihadapi.
- Bagaimana Basis Kode bergerak dalam proyek mereka? Seberapa robot itu bergerak?
- Minta siswa untuk menjelaskan apa yang salah. Siswa harus mampu menghubungkan kesalahan kembali dengan tujuan bersama atau tantangan yang dihadapi.
- Identifikasi Kapan dan Dimana Masalah Dimulai
- Tanyakan kepada siswa kapan mereka pertama kali menyadari masalahnya.
- Bagian mana dari proyek yang sedang dieksekusi?
- Jika siswa mengalami kesulitan menentukan letak kesalahan dalam proyek, dorong mereka untuk menggunakan fitur Project Stepping di VEXcode GO. Isyarat visual yang disediakan dengan fitur Project Stepping dapat digunakan untuk membantu siswa memecahkan masalah proyek mereka dengan memiliki kemampuan untuk melihat blok yang dieksekusi satu per satu. Ini akan memberi mereka gambaran yang lebih baik tentang blok mana yang mungkin menyebabkan kesalahan, sehingga proses debugging dapat menjadi lebih terarah dan efisien. Untuk informasi lebih lanjut tentang cara menggunakan fitur Project Stepping, lihat Artikel Stepping Through a Project in VEXcode GO VEX Library.
- Tanyakan kepada siswa kapan mereka pertama kali menyadari masalahnya.
- Lakukan & Suntingan Uji Coba
- Saat siswa menemukan kesalahan, mereka harus mengedit proyek mereka. Siswa dapat menguji proyek pada setiap suntingan yang dibuat. Jika proyek berhasil, maka mereka dapat melanjutkan ke langkah berikutnya dalam siklus pemecahan masalah. Jika proyek tidak berhasil, mereka dapat kembali ke awal proses dan mencoba lagi.
- Mencerminkan
- Minta siswa untuk memikirkan kesalahan yang mereka buat dan atasi selama proses tersebut.
- Apa kesalahannya? Apa yang Anda pelajari dari kesalahan ini? Bagaimana ini dapat membantu Anda saat membuat kode Basis Kode di lain waktu?
- Dorong siswa untuk mengenali kesalahan mereka dan apa yang mereka pelajari dari proses tersebut untuk membantu mendorong pola pikir berkembang. Penekanan kuat pada pola pikir berkembang dapat membantu siswa belajar kapan dan bagaimana bertahan dan juga kapan harus meminta bantuan2Jika siswa dapat melihat proses mereka sebagai pendahulu pembelajaran baru, maka mereka dapat menggunakan langkah-langkah di sini untuk memajukan pembelajaran mereka sendiri serta memajukan pembelajaran teman-teman sekelasnya. Saat siswa menghadapi masalah ini dan merenungkan kesalahan mereka, dorong mereka untuk berbagi kesalahan dan proses tersebut dengan siswa lainnya. Dengan cara ini, siswa dapat menjadi “sumber belajar bagi satu sama lain.”3
- Minta siswa untuk memikirkan kesalahan yang mereka buat dan atasi selama proses tersebut.
Bersihkan Area Pendaratan (Lab 2) dirancang untuk menjadi eksplorasi terbuka yang akan meminta siswa Anda untuk bertekun dalam memecahkan tantangan. Di Lab ini, kami memperkenalkan loop dengan blok [Forever] dan meminta siswa untuk bereksperimen dengan menggunakan loop dalam proyek mereka agar Basis Kode bergerak ke dan mendeteksi semua rintangan di area pendaratan (GO Field). Jika penggunaan loop dalam suatu proyek merupakan hal baru bagi siswa Anda, mungkin diperlukan beberapa kali iterasi proyek agar mereka dapat menggunakan loop secara efektif. Gunakan saran yang diuraikan dalam bagian ini untuk mempersiapkan siswa menghadapi proses coba-coba, dan untuk membantu mereka memecahkan masalah proyek mereka guna mencapai tujuan tantangan. Bagian Fasilitasi dari Bagian Permainan 1 dan 2 berisi dukungan pengajaran tambahan untuk membimbing siswa melalui tantangan Lab 2. Memiliki rencana tentang bagaimana Anda akan memberikan dukungan untuk pemecahan masalah dan coba-coba yang diperlukan di Lab ini dapat membantu Anda memenuhi kebutuhan individu siswa Anda.
Lihat artikel Membangun Ketahanan di Perpustakaan VEX Lab STEM untuk informasi lebih lanjut tentang bagaimana umpan balik yang efektif dapat membantu siswa membangun ketahanan dan pola pikir berkembang saat belajar di Lab STEM.
1 Hattie, John, dan Shirley Clarke. Pembelajaran yang Terlihat: Umpan Balik. Routledge, Taylor & Francis Group, 2019.
2 Ibid.
3 Ibid, hal. 121