
Die Mars Rover: Landing Challenge Unit fordert Ihre Schüler dazu auf, VEXcode GO-Projekte zu erstellen, um ein Problem zu lösen. In dieser Einheit lernen die Schüler die Verwendung des Augensensors auf der Vorderseite der Code Base kennen. Dabei handelt es sich um eine Herausforderung, die von dem Verfahren inspiriert ist, das Wissenschaftler anwenden, wenn sie versuchen, Raumfahrzeuge wie den Mars-2020-Rover Perseverance zu landen. Die Schüler codieren die Codebasis, um ein Hindernis zu erkennen, und stoppen dann die Fahrt, um anzuzeigen, dass auf dem Landeplatz ein Hindernis gefunden wurde.
Die NASA-Mission Mars 2020
Die NASA-Mission Mars 2020 befasst sich mit vorrangigen wissenschaftlichen Zielen für die Erforschung des Mars: Leben, Klima, Geologie und Menschen. Doch bevor der Perseverance-Rover seine Mission zum Sammeln von Gesteins- und Bodenproben an der Oberfläche beginnen kann, muss der Rover sicher auf dem Roten Planeten landen.
Nach Angaben der NASA waren nur etwa 40 % der jemals von einer Raumfahrtbehörde zum Mars geschickten Missionen erfolgreich. Der gesamte Prozess des Eintritts, des Abstiegs und der Landung wird nur wenige Minuten dauern, aber das Raumschiff, das den Perseverance-Rover trägt, muss von fast 20.000 km pro Stunde (~12.500 Meilen pro Stunde) auf Null abbremsen und einen offenen, flachen Bereich zum Landen finden . Die Marsoberfläche ist voller Hindernisse – riesige Einschlagskrater, Klippen, Risse und schroffe Felsbrocken. Unvorhersehbare Winde können auch zu weiteren Komplikationen führen.

Um eine sichere Landung zu gewährleisten, nimmt der Perseverance-Rover beim Abstieg Bilder auf und vergleicht diese Bilder mit den Karten. Es kann schnell entscheiden, ob dieses Gebiet von Wissenschaftlern als gefährlich eingestuft wurde, und Anpassungen vornehmen, um in einem offenen Gebiet zu landen.
In dieser Einheit programmieren die Schüler die Codebasis, um Hindernisse an den Landeplätzen auf ihren Feldern zu erkennen und so eine sichere Landung des Rovers zu gewährleisten.
Was ist ein Sensor?
Ein Sensor ist im Wesentlichen ein Gerät, das einem Roboter hilft, die Welt um ihn herum zu verstehen. Dies geschieht durch das Sammeln und Melden von Daten über seine Umgebung, die dann in einem Projekt verwendet werden können, um den Roboter dazu zu bringen, Entscheidungen zu treffen oder bestimmte Verhaltensweisen auszuführen. Diese Abfolge kann man sich als eine Entscheidungsschleife „Sinn → Denken → Handeln“ vorstellen.
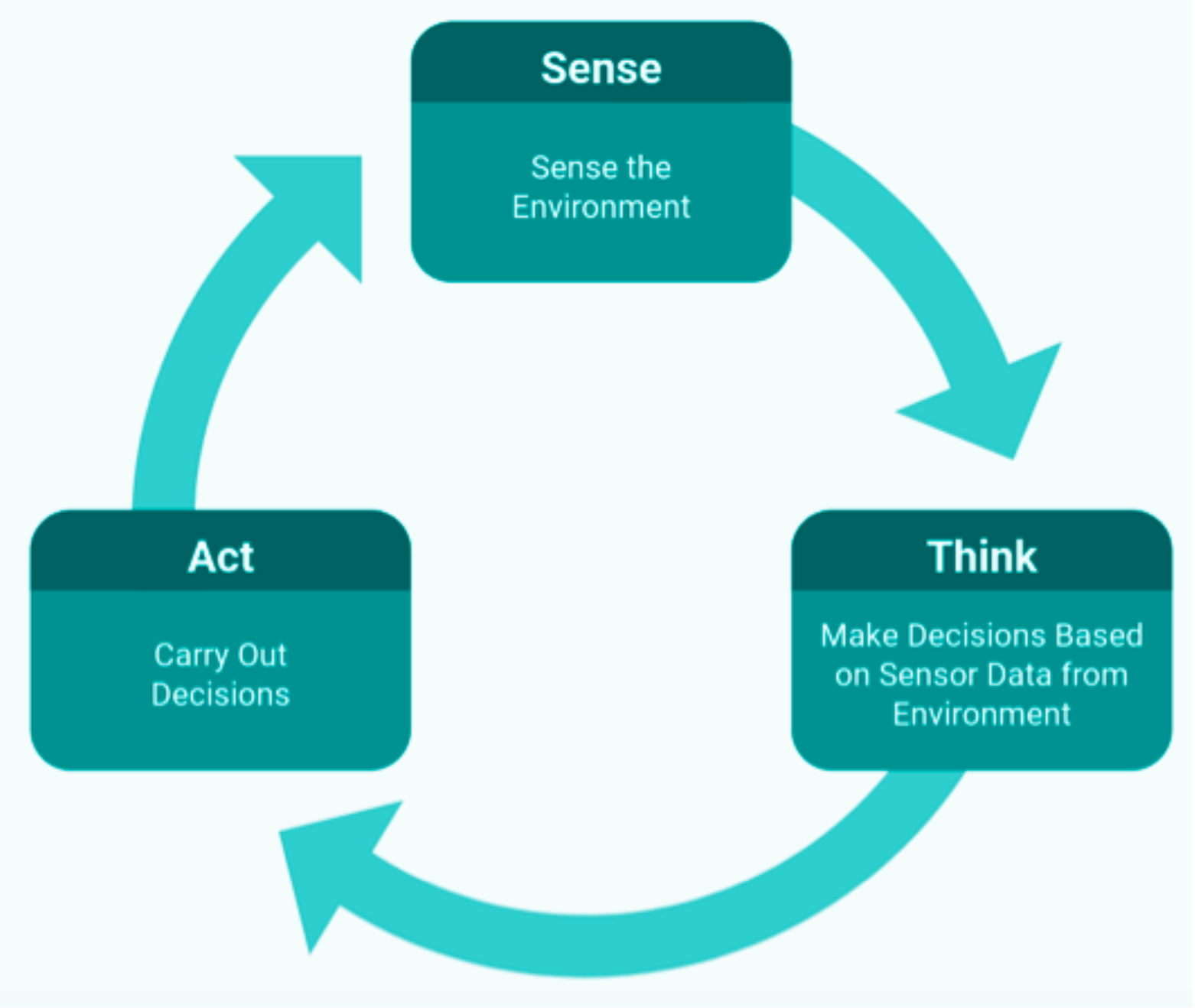
In dieser Einheit wird die Codebasis den Augensensor verwenden, um Objekte auf dem Feld zu erkennen, um den Bereich für eine sichere Landung des Rovers freizumachen. Das von den Studenten erstellte Projekt führt diese Schleife aus, da der Augensensor auf der Codebasis die Anwesenheit eines Objekts erkennt und der VEXcode GO dann befiehlt nachzudenken , eine Entscheidung basierend darauf zu treffen, ob der Augensensor ein Objekt erkennt oder nicht. Dann führt die Codebasis eine Aktion aus und stoppt die Fahrt basierend auf der Anwesenheit des Objekts.
Was ist der Augensensor?
Der Augensensor ist ein Sensor, der drei Dinge bestimmen kann – die Anwesenheit eines Objekts, seine Farbe und die Helligkeit eines Objekts oder einer Oberfläche. In dieser Einheit wird der Augensensor verwendet, um ein Objekt zu erkennen, damit es aus dem Landebereich entfernt werden kann. Die vom Augensensor gemeldeten Daten können in der Monitorkonsole angezeigt werden, die den Schülern eine visuelle Darstellung dessen bietet, was der Roboter „sieht“, und ihnen dabei helfen kann, eine Verbindung zwischen den Sensoren und dem Verhalten des Roboters herzustellen . Weitere Informationen zur Verwendung der Monitorkonsole in VEXcode GO finden Sie in diesem VEX-Bibliotheksartikel.
Der Augensensor auf der Code Base – Eye Forward Build befindet sich auf der nach vorne gerichteten Seite, wie im Bild unten gezeigt. Der Augensensor kann verwendet werden, um die Anwesenheit oder Abwesenheit eines Objekts sowie dessen Farbe oder Helligkeit zu erkennen.
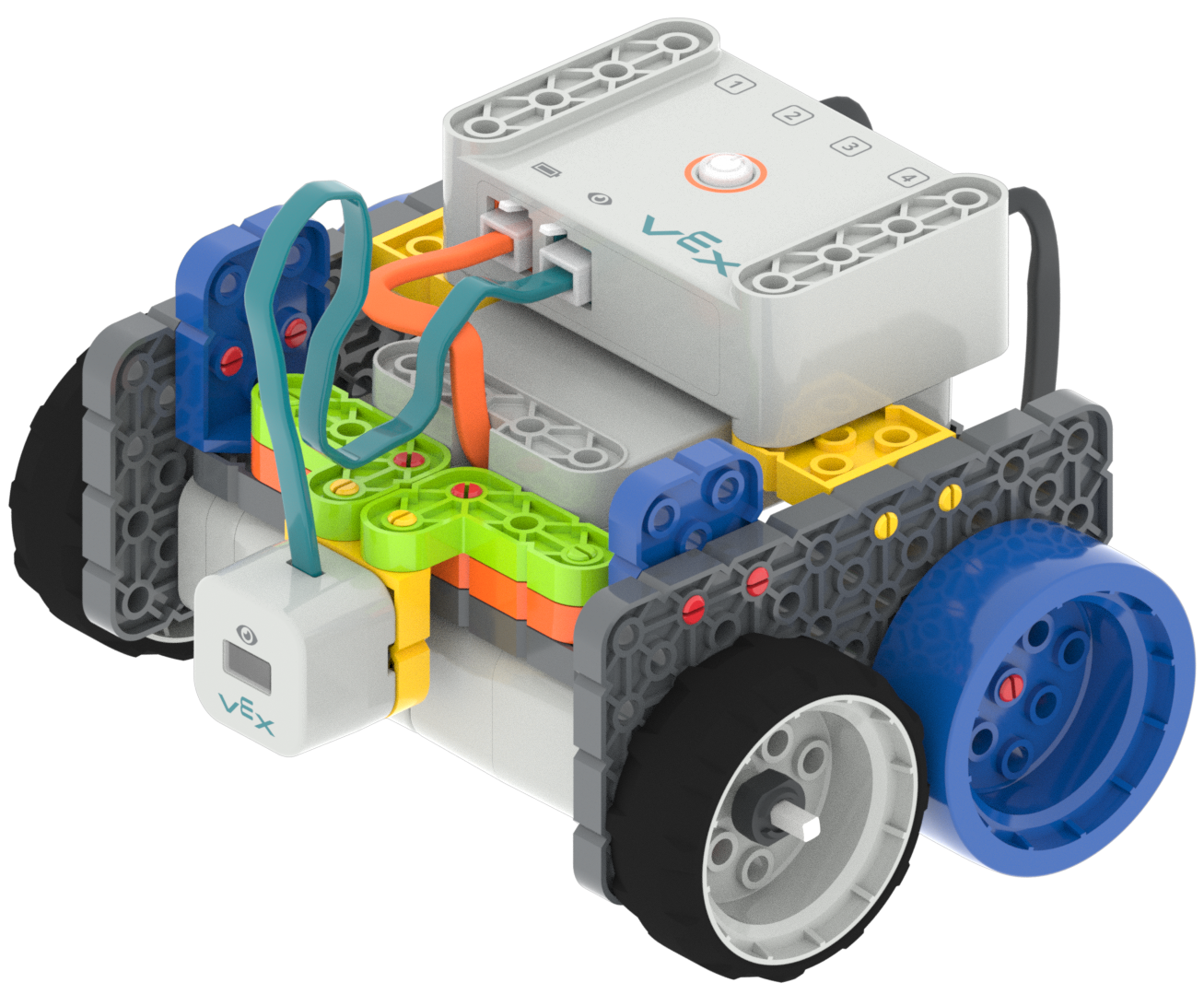
Der Augensensor nutzt Infrarotlicht, um Objekte zu erkennen. Helle Objekte reflektieren Infrarotlicht und werden vom Augensensor erkannt. Dunkle Objekte absorbieren Infrarotlicht und werden vom Augensensor nicht so gut erkannt. Verwenden Sie während der Einheit weißes oder helles Papier für die Hindernisse, um sicherzustellen, dass der Augensensor diese Objekte erkennen kann.
In dieser Einheit wird der Augensensor verwendet, um zu erkennen, ob sich ein Objekt im Pfad der Codebasis befindet. Aufgrund der Position des Augensensors auf der Codebasis kann er nur Objekte direkt vor ihm erkennen. Denken Sie daran, wenn Sie Ihre Codebasis und Hindernisse bei Ihren Schülern platzieren, damit die Materialien die Schüler auf den Erfolg vorbereiten.
Weitere Informationen zum Augensensor und seiner Funktionsweise finden Sie im Artikel Codierung mit dem VEX GO Eye Sensor VEX Library.
Was ist VEXcode GO?
VEXcode GO ist eine Codierungsumgebung, die zur Kommunikation mit VEX GO-Robotern verwendet wird. Schüler nutzen die Drag-and-Drop-Schnittstelle, um VEXcode GO-Projekte zu erstellen, die die Aktionen ihrer Roboter steuern. Der Zweck jedes Blocks kann anhand visueller Hinweise wie seiner Form, Farbe und Beschriftung identifiziert werden. Weitere Informationen zur Arbeit mit VEXcode GO, finden Sie im Abschnitt VEXcode GO der VEX-Bibliothek.
Die Blöcke in VEXcode GO stellen Roboter -Befehle dar, die zum Erstellen eines Projekts in VEXcode GO verwendet werden. Nachfolgend finden Sie eine Liste der Hauptblöcke, die in dieser Einheit verwendet werden.
| VEXcode GO-Blöcke | Verhaltensweisen |
|---|---|
 |
Der {When started} Block beginnt mit der Ausführung des angehängten Blockstapels, wenn das Projekt gestartet wird. |
![[Laufwerk]-Block](/stemlabs/sites/default/files/inline-images/IMG_3908B0BDE720-1.jpeg) |
Der [Drive]-Block bewegt den Antriebsstrang für immer vorwärts oder rückwärts. |
![[Drehen für] Block](/stemlabs/sites/default/files/inline-images/IMG_4C9CEBAFA9C0-1.jpeg) |
Der Block [Drehen um] dreht den Antriebsstrang um eine bestimmte Strecke. |
![[Für immer] blockieren](/stemlabs/sites/default/files/inline-images/IMG_81A9639F50BD-1.jpeg) |
Der [Forever]-Block wiederholt alle im „C“ enthaltenen Blöcke für immer. |
![[Warten] blockieren](/stemlabs/sites/default/files/inline-images/IMG_BA932FD0539C-1.jpeg) |
Der Block [Wait] wartet eine bestimmte Zeit, bevor er zum nächsten Block in einem Projekt wechselt. |
![[Warten bis] blockieren](/stemlabs/sites/default/files/inline-images/IMG_F0CE9176887D-1.jpeg) |
Der Block [Warten bis] wartet darauf, dass die darin enthaltene Bedingung TRUE meldet, bevor er zum nächsten Block übergeht. |
![Block [Gefundenes Objekt].](/stemlabs/sites/default/files/inline-images/IMG_C6D52E895867-1.jpeg) |
Der <Found object> -Block meldet, wenn der Augensensor ein Objekt erkennt. |
![[Fahren stoppen]-Block](/stemlabs/sites/default/files/inline-images/IMG_9BF4B55067B3-1.jpeg) |
Der Block [Fahren stoppen] stoppt den Antriebsstrang. |
![Block [Stoßstangenfarbe festlegen].](/stemlabs/sites/default/files/inline-images/IMG_DD0B68773B36-1.jpeg) |
Der Block [Bumperfarbe festlegen] legt die Farbe des LED-Stoßfängers fest. |
Wie funktioniert der Block [Warten bis] mit dem Augensensor?
In dieser Einheit verwenden die Schüler den Augensensor auf der Codebasis, um Hindernisse im Landebereich des Mars-Rover zu erkennen. Um dies zu kodieren, verwenden sie den Block [Warten bis] in einem Projekt. Der Block [Warten bis] ist ein Kontrollblock, der wiederholt eine Bedingung prüft, um den Ablauf eines Projekts zu steuern. Ein Projekt wird nicht zum nächsten Block verschoben, bis die Bedingung im Block [Warten bis] als wahr gemeldet wird. In dieser Einheit wird der Block [Warten bis] mit dem Block <Found object> als Bedingung verwendet, sodass gewartet wird, bis der Augensensor ein Objekt erkennt und die Bedingung des Blocks <Found object> wahr ist, um mit dem nächsten fortzufahren Block im Projekt.
Die [Warten bis]-Blöcke können in Verbindung mit nicht wartenden Blöcken wie dem [Fahren]-Block in dieser Einheit verwendet werden, sodass die Codebasis bis vorwärts fahren kann, bis der Augensensor ein Objekt erkennt.
Um den Projektablauf in Echtzeit zu sehen, während Ihr Roboter läuft, sehen Sie sich die Highlight-Funktion in VEXcode GO an. Zu Beginn des Projekts wird die grüne Markierung um den Block [Warten bis] angezeigt, bis die Bedingung erfüllt ist. Die grüne Hervorhebung scheint die nicht wartenden Blöcke (in diesem Fall der [Drive]-Block) zu überspringen, da diese Befehle schnell ausgeführt werden.
In dieser Einheit verwenden die Schüler in ihren Projekten eine Kombination aus Warteblöcken, wie dem Block [Warten bis], und Nicht-Warteblöcken, wie dem Block [Fahren], um die Lab-Aktivitäten und Herausforderungen abzuschließen. Um mehr über wartende und nicht wartende Blöcke in VEXcode GO zu erfahren, lesen Sie diesen Artikel der VEX-Bibliothek.
Vorbereitung auf offene Herausforderung in dieser Einheit
In dieser Einheit werden die Schüler gebeten, das zuvor Gelernte zu nutzen, um ein Projekt zur Lösung einer Herausforderung zu erstellen. Da es wichtig ist, die Schüler regelmäßig dazu herauszufordern, Probleme zu lösen und die Fähigkeiten, die sie erlernt haben, auf eine neue Art und Weise anzuwenden, empfehlen wir Ihnen, Ihre Schüler herauszufordern und diese Strategien zu nutzen, um Resilienz aufzubauen und ihnen dabei zu helfen sie durch die Krise zu führen Herausforderung. Hier sind einige Vorschläge, die Schülern beim Experimentieren mit ihren Projekten helfen sollen:
Geben Sie Feedback, ohne die Lösung anzugeben – Fehler bei der Bearbeitung einer Herausforderung werden erwartet und gefördert. „Lernfehler können Chancen eröffnen und dazu beitragen, Zusammenhänge herzustellen.“1 Wenn Sie mit Ihren Schülern einen vertrauten Problemlösungsprozess erstellen, können diese lernen , wie sie ein Problem identifizieren und weitermachen können, wenn ihnen ein Fehler unterläuft, wodurch Störungen und Frustration minimiert werden. Versuchen Sie, mit Ihren Schülern den folgenden Problemlösungszyklus anzuwenden, um ihnen bei der Fehlersuche in ihren Projekten zu helfen und ihre eigenen Lösungen zu finden.
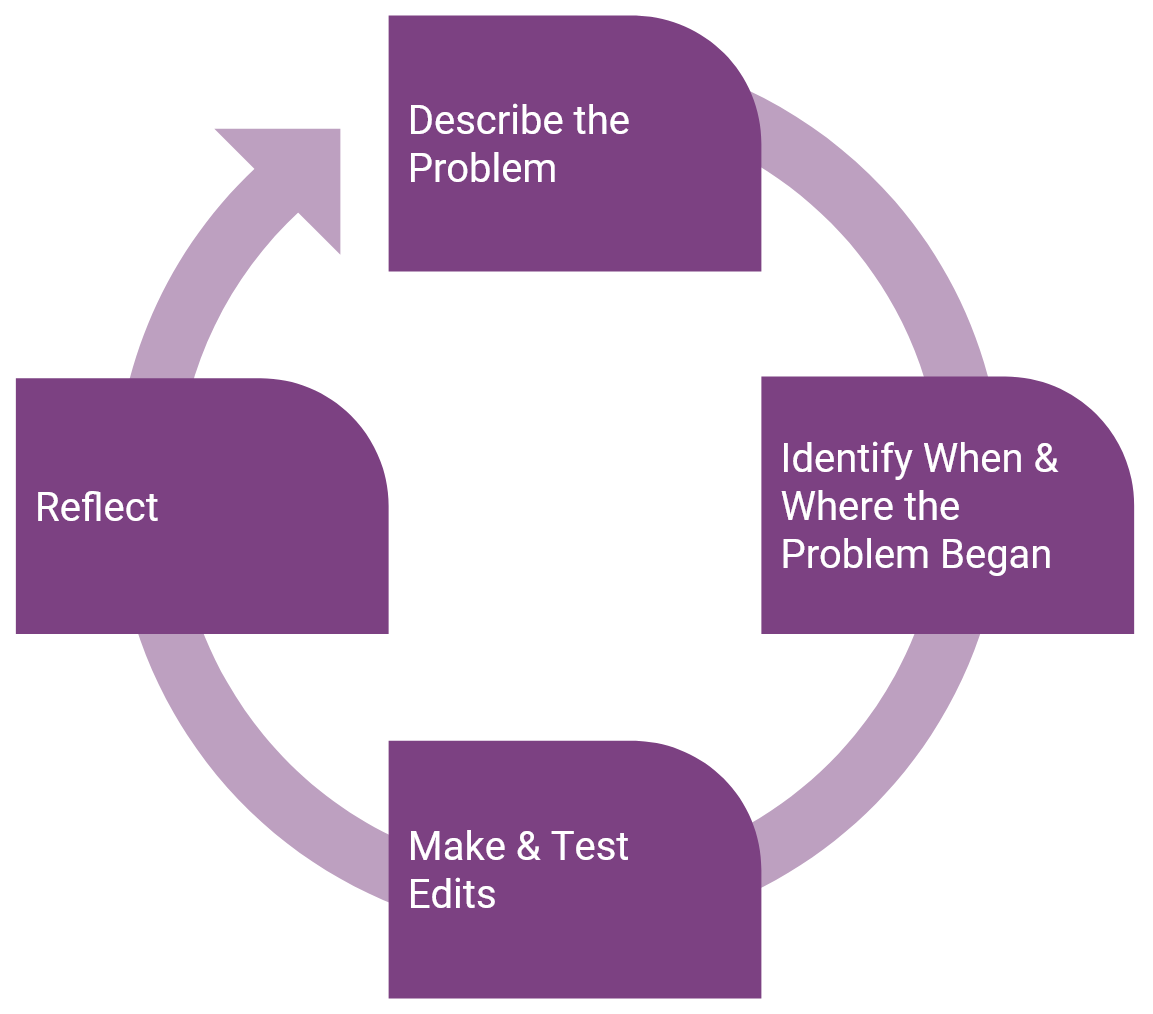
- Beschreibe das Problem
- Bitten Sie den Schüler zu erklären, was falsch ist. Die Schüler sollten in der Lage sein, den Fehler mit dem gemeinsamen Ziel oder der jeweiligen Herausforderung in Zusammenhang zu bringen.
- Wie bewegt sich die Codebasis in ihrem Projekt? Wie soll sich der Roboter bewegen?
- Bitten Sie den Schüler zu erklären, was falsch ist. Die Schüler sollten in der Lage sein, den Fehler mit dem gemeinsamen Ziel oder der jeweiligen Herausforderung in Zusammenhang zu bringen.
- Identifizieren Sie, wann und wo das Problem begann
- Fragen Sie den Schüler, wann ihm das Problem zum ersten Mal aufgefallen ist.
- Welcher Teil des Projekts wurde ausgeführt?
- Wenn Schüler Schwierigkeiten haben, festzustellen, wo im Projekt der Fehler liegt, ermutigen Sie sie, die Project Stepping-Funktion in VEXcode GO zu verwenden. Die visuellen Hinweise, die mit der Project Stepping-Funktion bereitgestellt werden, können verwendet werden, um Schülern bei der Fehlersuche in ihrem Projekt zu helfen, indem sie die Möglichkeit haben, die ausgeführten Blöcke einzeln zu sehen. sie eine bessere Vorstellung davon, welche Blöcke den Fehler verursachen könnten, sodass das Debuggen zu einem gezielteren und effizienteren Prozess werden kann. Weitere Informationen zur Verwendung der Project Stepping-Funktion finden Sie im Artikel „Stepping Through a Project in VEXcode GO VEX Library“.
- Fragen Sie den Schüler, wann ihm das Problem zum ersten Mal aufgefallen ist.
- Nehmen Sie & Teständerungen vor
- Wenn Schüler einen Fehler finden, sollten sie an ihrem Projekt vornehmen. Die Schüler können das Projekt mit jeder vorgenommenen Bearbeitung testen. Wenn das Projekt erfolgreich ist, können sie mit dem nächsten Schritt im Problemlösungszyklus fortfahren. Wenn das Projekt nicht erfolgreich ist, können sie zum Anfang des Prozesses zurückkehren und es erneut versuchen.
- Reflektieren
- Bitten Sie die Schüler, über die Fehler nachzudenken, die sie während des Prozesses gemacht und überwunden haben.
- Was war der Fehler? Was haben Sie aus diesem Fehler gelernt? Wie kann es Ihnen beim nächsten Codieren der Code Base helfen?
- Ermutigen Sie die Schüler, ihre Fehler zu erkennen und zu erkennen, was sie aus dem Prozess gelernt haben, um eine wachstumsorientierte Denkweise zu fördern. Eine starke Betonung einer wachstumsorientierten Denkweise kann den Schülern dabei helfen, zu lernen, wann und wie sie durchhalten und auch um Hilfe bitten sollten.2 Wenn Schüler ihren Prozess als Vorläufer für neues Lernen sehen können, können sie die hier beschriebenen Schritte nutzen, um ihr eigenes Lernen sowie das ihrer Klassenkameraden voranzutreiben. Wenn Schüler auf diese Probleme stoßen und über ihre Fehler nachdenken, ermutigen Sie sie, ihre Fehler und Vorgehensweise mit ihren Mitschülern zu teilen. Auf diese Weise können Studierende zu „Lernressourcen füreinander“ werden.3
- Bitten Sie die Schüler, über die Fehler nachzudenken, die sie während des Prozesses gemacht und überwunden haben.
„Clear the Landing Area“ (Lab 2) ist als offene Erkundungstour konzipiert, bei der Ihre Schüler beharrlich an der Lösung einer Herausforderung arbeiten müssen. In dieser Übung führen wir Schleifen mit dem Block [Forever] ein und bitten die Schüler, mit der Verwendung von Schleifen in ihrem Projekt zu experimentieren, damit die Code Base alle Hindernisse auf dem Landebereich (GO Field) ansteuern und erkennen kann. Wenn die Verwendung von Schleifen in einem Projekt für Ihre Schüler neu ist, kann es mehrere Iterationen ihrer Projekte erfordern, um Schleifen effektiv zu nutzen. Nutzen Sie die in diesem Abschnitt dargelegten Vorschläge, um die Schüler auf den Versuch-und-Irrtum-Prozess vorzubereiten und ihnen bei der Fehlerbehebung ihrer Projekte zu helfen, um das Ziel der Herausforderung zu erreichen. Der Abschnitt „Moderation“ von Spielteil 1 und 2 enthält zusätzliche Unterrichtshilfen , um Schüler durch die Herausforderung von Labor 2 zu führen. Wenn Sie einen Plan haben, wie Sie die in diesem Labor erforderliche Problemlösung und das Ausprobieren unterstützen, können Sie den individuellen Bedürfnissen Ihrer Studierenden gerecht werden.
Weitere Informationen dazu finden Sie im Artikel der VEX-Bibliothek „Aufbau von Resilienz in STEM Labs“, wie effektives Feedback Schülern dabei helfen kann, Resilienz und eine Wachstumsmentalität aufzubauen, während sie in STEM Labs arbeiten.
1 Hattie, John und Shirley Clarke. Sichtbares Lernen: Feedback. Routledge, Taylor & Francis Group, 2019.
2 Ebd.
3 Ebd., S. 121