
Mars Rover: Landing Challenge Unit จะท้าทายให้นักเรียนสร้างโครงการ VEXcode GO เพื่อแก้ปัญหา หน่วยนี้แนะนำให้นักเรียนใช้เซ็นเซอร์ตรวจจับดวงตาที่ด้านหน้าของ Code Base ในความท้าทาย โดยได้รับแรงบันดาลใจจากกระบวนการที่นักวิทยาศาสตร์ใช้ขณะพยายามลงจอดยานอวกาศ เช่น รถแลนด์โรเวอร์ Mars 2020 Perseverance นักเรียนจะเขียนรหัสฐานเพื่อตรวจจับสิ่งกีดขวาง จากนั้นหยุดขับรถเพื่อระบุว่าพบสิ่งกีดขวางบนจุดลงจอด
ภารกิจ Mars 2020 ของ NASA
ภารกิจ Mars 2020 ของ NASA กล่าวถึงเป้าหมายทางวิทยาศาสตร์ที่มีลำดับความสำคัญสูงสำหรับการสำรวจดาวอังคาร ซึ่งได้แก่ ชีวิต ภูมิอากาศ ธรณีวิทยา และมนุษย์ แต่ก่อนที่ยานสำรวจ Perseverance จะเริ่มภารกิจรวบรวมตัวอย่างหินและดินบนพื้นผิว รถแลนด์โรเวอร์จำเป็นต้องลงจอดบนดาวเคราะห์สีแดงอย่างปลอดภัย
จากข้อมูลของ NASA มีเพียงประมาณ 40% ของภารกิจที่เคยส่งไปยังดาวอังคาร (โดยหน่วยงานอวกาศใดๆ) เท่านั้นที่ประสบความสำเร็จ กระบวนการเข้า ลง และลงจอดทั้งหมดจะใช้เวลาเพียงไม่กี่นาที แต่ยานอวกาศที่บรรทุกยานสำรวจ Perseverance จำเป็นต้องชะลอความเร็วจากเกือบ 20,000 กม. ต่อชั่วโมง (~ 12,500 ไมล์ต่อชั่วโมง) ให้เหลือศูนย์และค้นหาพื้นที่ราบที่เปิดโล่งเพื่อลงจอด . พื้นผิวดาวอังคารเต็มไปด้วยสิ่งกีดขวาง เช่น หลุมอุกกาบาตขนาดใหญ่ หน้าผา รอยแตก และหินขรุขระ ลมที่คาดเดาไม่ได้ยังสามารถกระตุ้นให้เกิดภาวะแทรกซ้อนเพิ่มเติมได้

เพื่อช่วยให้มั่นใจในการลงจอดอย่างปลอดภัย ยานสำรวจ Perseverance จะถ่ายภาพขณะลงจอดและเปรียบเทียบภาพเหล่านั้นกับแผนที่ สามารถตัดสินใจได้อย่างรวดเร็วว่าพื้นที่นั้นถูกกำหนดโดยนักวิทยาศาสตร์ว่าเป็นอันตรายหรือไม่ และทำการปรับเปลี่ยนที่ดินในพื้นที่เปิดโล่ง
ในหน่วยการเรียนรู้นี้ นักเรียนจะเขียนโค้ดฐานโค้ดเพื่อตรวจจับสิ่งกีดขวาง ณ จุดลงจอดบนฟิลด์ ของตน เพื่อช่วยให้แน่ใจว่ารถแลนด์โรเวอร์จะลงจอดอย่างปลอดภัย
เซ็นเซอร์คืออะไร?
โดยพื้นฐานแล้วเซ็นเซอร์คืออุปกรณ์ที่ช่วยให้หุ่นยนต์เข้าใจโลกรอบตัว โดยการรวบรวมและรายงานข้อมูลเกี่ยวกับสภาพแวดล้อม ซึ่งสามารถนำมาใช้ในโครงการเพื่อให้หุ่นยนต์ตัดสินใจหรือดำเนินการพฤติกรรมบางอย่างได้ ลำดับนี้สามารถมองได้ว่าเป็นวงจรการตัดสินใจแบบ Sense → Think → Act
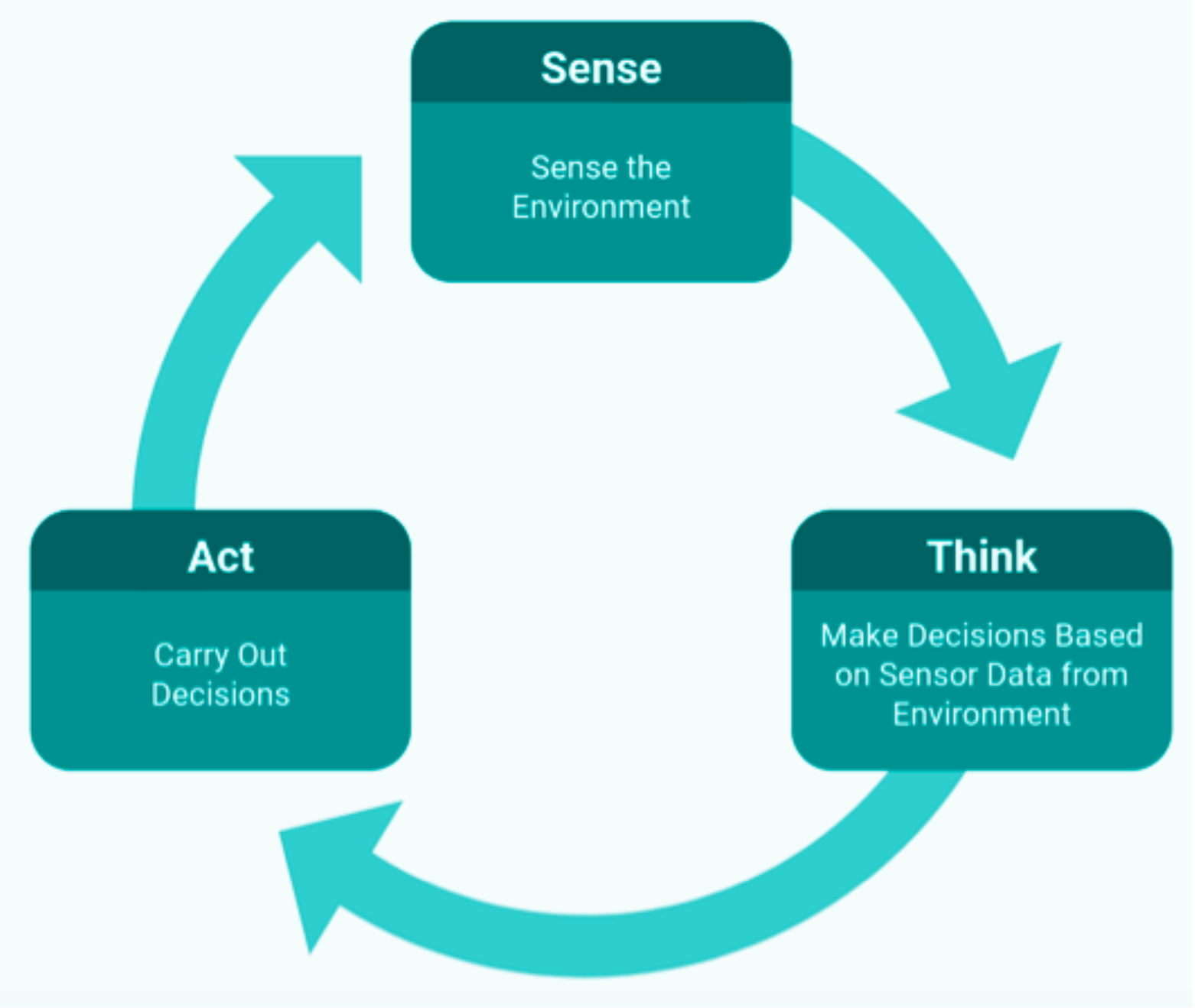
ในหน่วยนี้ รหัสฐาน จะใช้เซ็นเซอร์ตาเพื่อ ตรวจจับวัตถุ บนสนามเพื่อช่วยเคลียร์พื้นที่เพื่อให้รถแลนด์โรเวอร์ลงจอดอย่างปลอดภัย นักเรียนในโครงการสร้างจะดำเนินการวนซ้ำนี้เนื่องจากเซ็นเซอร์ตาบนฐานรหัสจะ สัมผัส การมีอยู่ของวัตถุ จากนั้น VEXcode GO จะสั่งให้ Think ตัดสินใจโดยขึ้นอยู่กับว่าเซ็นเซอร์ตาตรวจพบวัตถุหรือไม่ จากนั้น Code Base จะ Act และหยุด การขับขี่ตามการมีอยู่ของวัตถุ
เซ็นเซอร์ตาคืออะไร?
เซ็นเซอร์ตา เป็นเซ็นเซอร์ที่สามารถระบุสามสิ่ง ได้แก่ การมีอยู่ของวัตถุ สีของมัน และความสว่างของวัตถุหรือพื้นผิว ในยูนิตนี้ Eye Sensor ใช้ในการตรวจจับวัตถุเพื่อให้สามารถเคลียร์ออกจากบริเวณที่ลงจอดได้ ข้อมูลที่รายงานโดยเซ็นเซอร์ตาสามารถดูได้ใน Monitor Console ซึ่งให้นักเรียนเห็นภาพว่าหุ่นยนต์กำลัง 'มองเห็น' อะไร และสามารถใช้เพื่อช่วยให้พวกเขาเชื่อมโยงระหว่างเซ็นเซอร์และพฤติกรรมของหุ่นยนต์ . สำหรับข้อมูลเพิ่มเติมเกี่ยวกับการใช้ Monitor Console ใน VEXcode GO โปรดดูบทความ VEX Library นี้
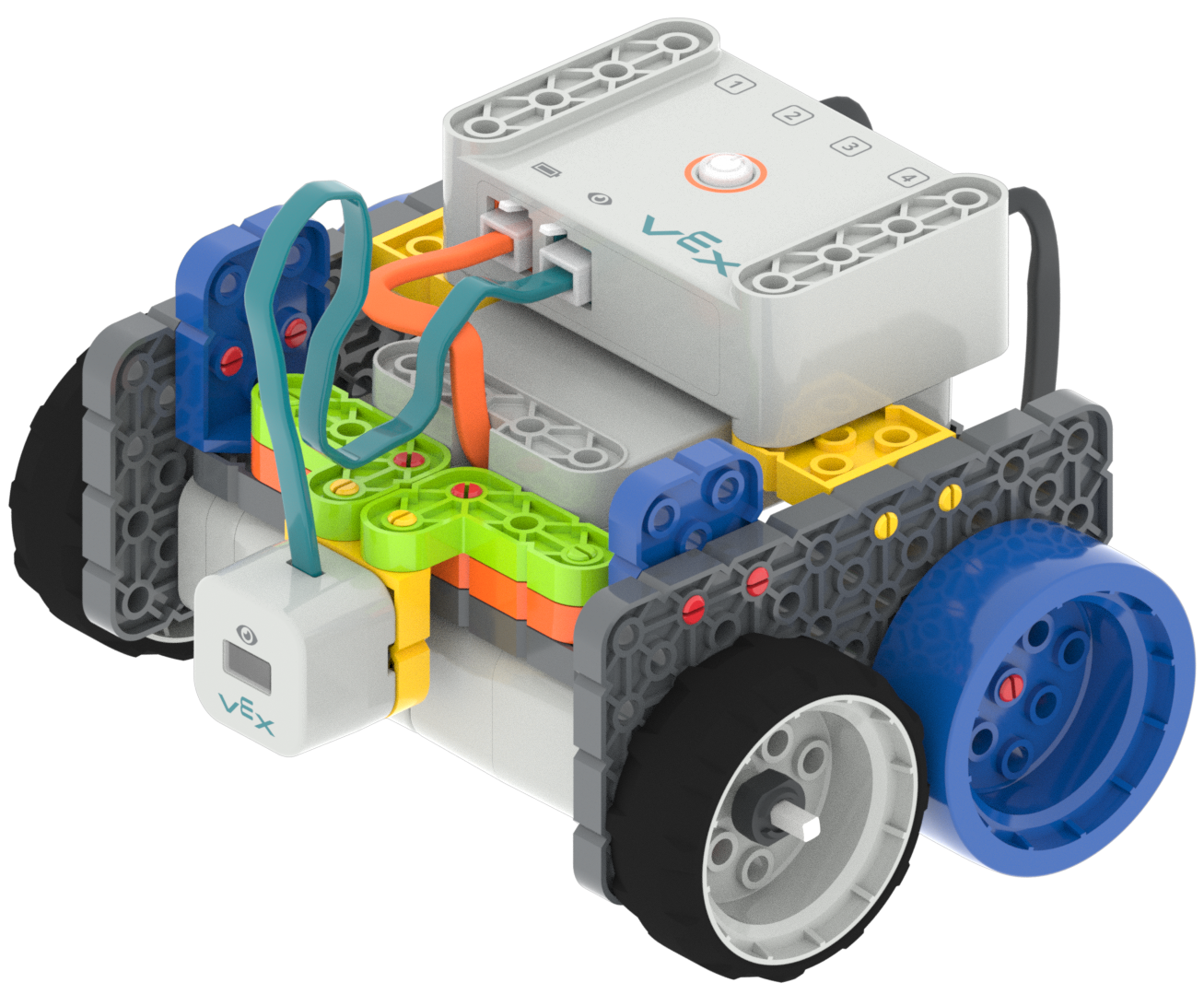
เซ็นเซอร์ตรวจจับสายตาบนฐานรหัส - โครงสร้าง Eye Forward อยู่ที่ด้านหน้า ดังที่แสดงในภาพด้านล่าง สามารถใช้เซนเซอร์ตาเพื่อตรวจจับการมีอยู่หรือไม่มีวัตถุ รวมถึงระดับสีหรือความสว่างของวัตถุ
Eye Sensor ใช้แสงอินฟราเรดในการตรวจจับวัตถุ วัตถุสีอ่อนจะสะท้อนแสงอินฟราเรด และเซ็นเซอร์ตาตรวจจับ ได้ง่ายกว่า วัตถุสีเข้มดูดซับแสงอินฟราเรดและเซ็นเซอร์ตาตรวจไม่พบวัตถุเหล่านั้นเช่นกัน ในระหว่างที่เครื่อง ให้ใช้กระดาษสีขาวหรือกระดาษสีอ่อนเป็นสิ่งกีดขวางเพื่อให้แน่ใจว่าเซ็นเซอร์ตาจะสามารถตรวจจับวัตถุเหล่านี้ได้
ในหน่วยนี้ Eye Sensor จะถูกใช้เพื่อตรวจจับเมื่อมีวัตถุอยู่ในเส้นทางของ Code Base ตำแหน่งของเซนเซอร์ตาบนฐานโค้ดหมายความว่าสามารถตรวจจับวัตถุที่อยู่ด้านหน้าได้โดยตรงเท่านั้น โปรดคำนึงถึงสิ่งนี้เมื่อคุณวางรหัสฐาน และอุปสรรคไว้กับนักเรียนของคุณ เพื่อให้สื่อการสอนเตรียมนักเรียนให้พร้อมสำหรับความสำเร็จ
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับ Eye Sensor และวิธีการทำงาน โปรดดูบทความ การเข้ารหัสด้วย VEX GO Eye Sensor VEX Library
VEXcode GO คืออะไร?
VEXcode GO เป็นสภาพแวดล้อมการเขียนโค้ดที่ใช้ในการสื่อสารกับหุ่นยนต์ VEX GO นักเรียนใช้อินเทอร์เฟซแบบลากและวางเพื่อสร้างโปรเจ็กต์ VEXcode GO ที่ควบคุมการทำงานของโรบ็อตของตน จุดประสงค์ของแต่ละบล็อกสามารถระบุได้โดยใช้ภาพ เช่น รูปร่าง สี และป้ายกำกับเป็น สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีการทำงานกับ VEXcode GO ดูที่ VEXcode GO ส่วนของ VEX Library
บล็อกใน VEXcode GO แสดงถึงคำสั่งหุ่นยนต์ ที่ใช้เพื่อสร้างโปรเจ็กต์ใน VEXcode GO ด้านล่างนี้คือรายการบล็อกหลักที่ใช้ในระหว่างหน่วยนี้
| บล็อก VEXcode GO | พฤติกรรม |
|---|---|
 |
บล็อก {When started} เริ่มรันสแต็กบล็อกที่แนบมาเมื่อเริ่มต้นโปรเจ็กต์ |
![[ไดรฟ์] บล็อก](/stemlabs/sites/default/files/inline-images/IMG_3908B0BDE720-1.jpeg) |
บล็อก [Drive] จะเคลื่อนระบบขับเคลื่อนไปข้างหน้าหรือถอยหลังตลอดไป |
![[หมุนเพื่อ] บล็อก](/stemlabs/sites/default/files/inline-images/IMG_4C9CEBAFA9C0-1.jpeg) |
บล็อก [เลี้ยวเพื่อ] จะเปลี่ยนระบบขับเคลื่อนตามระยะทางที่กำหนด |
![[ตลอดไป] บล็อก](/stemlabs/sites/default/files/inline-images/IMG_81A9639F50BD-1.jpeg) |
บล็อก [Forever] จะทำซ้ำบล็อกใด ๆ ที่อยู่ภายใน 'C' ตลอดไป |
![[รอ] บล็อก](/stemlabs/sites/default/files/inline-images/IMG_BA932FD0539C-1.jpeg) |
บล็อก [Wait] รอตามระยะเวลาที่กำหนดก่อนจะย้ายไปยังบล็อกถัดไปในโปรเจ็กต์ |
![[รอจนกระทั่ง] บล็อก](/stemlabs/sites/default/files/inline-images/IMG_F0CE9176887D-1.jpeg) |
บล็อก [รอจนกระทั่ง] รอให้เงื่อนไขภายในรายงาน TRUE ก่อนที่จะย้ายไปยังบล็อกถัดไป |
![[พบวัตถุ] บล็อก](/stemlabs/sites/default/files/inline-images/IMG_C6D52E895867-1.jpeg) |
บล็อก <Found object> จะรายงานว่าเซ็นเซอร์ตรวจจับดวงตาตรวจพบวัตถุหรือไม่ |
![[หยุดขับรถ] บล็อก](/stemlabs/sites/default/files/inline-images/IMG_9BF4B55067B3-1.jpeg) |
บล็อก [หยุดการขับขี่] จะหยุดระบบขับเคลื่อน |
![[ตั้งค่าสีกันชน] บล็อก](/stemlabs/sites/default/files/inline-images/IMG_DD0B68773B36-1.jpeg) |
บล็อก [ตั้งค่าสีกันชน] กำหนดสีของกันชน LED |
บล็อก [รอจนกระทั่ง] ทำงานอย่างไรกับเซ็นเซอร์ตา
ในหน่วยการเรียนรู้นี้ นักเรียนจะใช้เซ็นเซอร์ตาบนฐานรหัสเพื่อตรวจจับสิ่งกีดขวางในพื้นที่ลงจอดของยานสำรวจดาวอังคาร ในการเขียนโค้ดนี้ พวกเขาจะใช้บล็อก [รอจนกระทั่ง] ในโปรเจ็กต์ บล็อก [รอจนกระทั่ง] เป็นบล็อกควบคุมที่จะตรวจสอบเงื่อนไขซ้ำๆ เพื่อควบคุมโฟลว์ของโปรเจ็กต์ โปรเจ็กต์จะไม่ย้ายไปยังบล็อกถัดไปจนกว่าเงื่อนไขในบล็อก [รอจนกระทั่ง] จะรายงานว่าเป็นจริง ในยูนิตนี้ บล็อก [รอจนกระทั่ง] ถูกใช้โดยมีบล็อก <Found object> เป็นเงื่อนไข - เพื่อที่จะรอจนกว่าเซ็นเซอร์ตาตรวจจับและวัตถุ และสภาพของบล็อก <Found object> เป็นจริง - เพื่อย้ายไปยังบล็อกถัดไป บล็อกในโครงการ
บล็อก [รอจนกระทั่ง] สามารถใช้ร่วมกับบล็อกที่ไม่รอได้ เช่น บล็อก [ขับเคลื่อน] ในยูนิตนี้ เพื่อให้ Code Base สามารถขับเคลื่อนไปข้างหน้า ถึง เซ็นเซอร์ตรวจจับดวงตาตรวจพบวัตถุ
หากต้องการดูโฟลว์โปรเจ็กต์แบบเรียลไทม์ขณะที่หุ่นยนต์ของคุณกำลังทำงาน ให้ดูฟีเจอร์ไฮไลท์ใน VEXcode GO เมื่อเริ่มต้นโครงการ ไฮไลต์สีเขียวจะปรากฏขึ้นรอบๆ บล็อก [รอจนกระทั่ง] จนกว่าเงื่อนไขจะเป็นจริง ไฮไลต์สีเขียวจะปรากฏขึ้นเพื่อข้ามบล็อกที่ไม่รอ (ในกรณีนี้คือบล็อก [ไดรฟ์]) เนื่องจากคำสั่งเหล่านี้ดำเนินการอย่างรวดเร็ว
ในหน่วยการเรียนรู้นี้ นักเรียนจะใช้บล็อกการรอร่วมกัน เช่น บล็อก [รอจนกระทั่ง] และบล็อกที่ไม่รอ เช่น บล็อก [ไดรฟ์] ในโครงการของตนเพื่อทำกิจกรรมแล็บและการท้าทายให้เสร็จสิ้น หากต้องการเรียนรู้เพิ่มเติมเกี่ยวกับการรอและการไม่รอบล็อกใน VEXcode GO โปรดอ่านบทความ VEX Library นี้
เตรียม Open-Ended Challenge ในหน่วยนี้
ในหน่วยการเรียนรู้นี้ นักเรียนจะถูกขอให้ใช้สิ่งที่เรียนรู้มาก่อนหน้านี้เพื่อสร้างโครงงานเพื่อแก้ปัญหาความท้าทาย เนื่องจากเป็นเรื่องสำคัญที่จะต้องท้าทายนักเรียนเป็นประจำให้แก้ปัญหาและใช้ทักษะที่พวกเขาได้เรียนรู้ในรูปแบบใหม่ เราขอแนะนำให้คุณท้าทายนักเรียนของคุณและใช้กลยุทธ์เหล่านี้ เพื่อสร้างความยืดหยุ่น และ ช่วย แนะนำพวกเขาผ่าน ท้าทาย. คำแนะนำเล็กๆ น้อยๆ ต่อไปนี้จะช่วยนักเรียนขณะทดลองโครงงานของตน:
ให้ข้อเสนอแนะโดยไม่ต้องให้วิธีแก้ปัญหา - การทำผิดพลาดในขณะที่ทำงานผ่านความท้าทาย เป็นสิ่งที่คาดหวังและสนับสนุน “ข้อผิดพลาดในการเรียนรู้สามารถสร้างโอกาส [และ] สามารถช่วยให้เกิดความเชื่อมโยงได้”1 การสร้างกระบวนการ ในการแก้ปัญหาที่คุ้นเคยร่วมกับนักเรียนของคุณสามารถช่วยให้พวกเขาเรียนรู้ วิธีในการระบุปัญหาและก้าวไปข้างหน้าเมื่อพวกเขาทำผิดพลาด ซึ่งจะช่วยลดความยุ่งยากและความยุ่งยากให้เหลือน้อยที่สุด ลองใช้วงจรการแก้ปัญหาต่อไปนี้กับนักเรียนของคุณ เพื่อช่วยแก้ไขปัญหาโครงงานและคิดวิธีแก้ปัญหาด้วยตนเอง
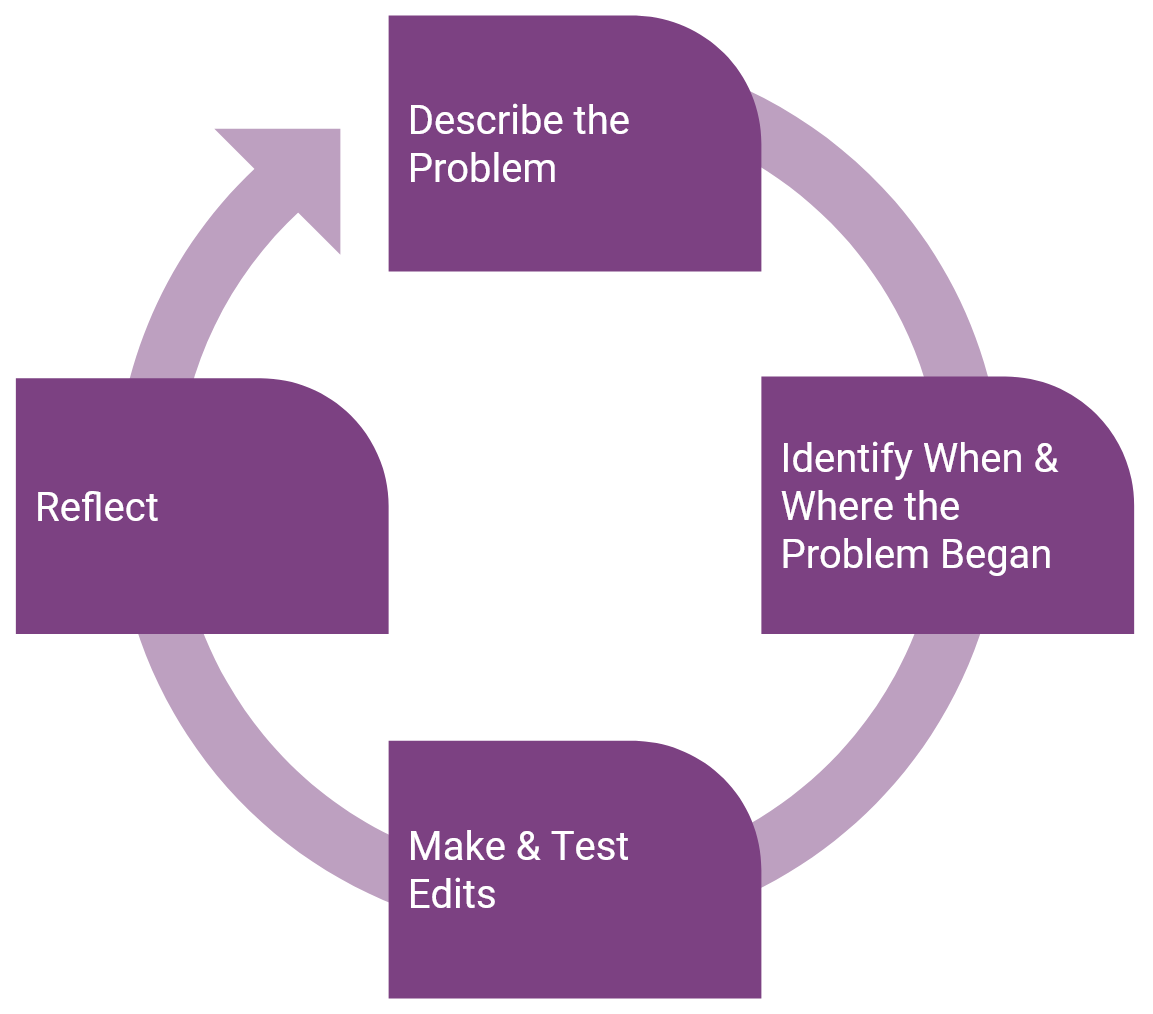
- อธิบายปัญหา
- ขอให้นักเรียนอธิบายว่ามีอะไรผิดปกติ นักเรียนควรสามารถเชื่อมโยงข้อผิดพลาดกลับไปยังเป้าหมายร่วมกันหรือความท้าทายที่เกิดขึ้นได้
- Code Base เคลื่อนไหวในโครงการของพวกเขาอย่างไร? หุ่นยนต์ ควรเคลื่อนที่ อย่างไร
- ขอให้นักเรียนอธิบายว่ามีอะไรผิดปกติ นักเรียนควรสามารถเชื่อมโยงข้อผิดพลาดกลับไปยังเป้าหมายร่วมกันหรือความท้าทายที่เกิดขึ้นได้
- ระบุว่าปัญหาเริ่มต้นเมื่อใดและที่ไหน
- ถามนักเรียนว่าพวกเขาสังเกตเห็นปัญหาครั้งแรกเมื่อใด
- ส่วนใดของโครงการที่กำลังดำเนินการอยู่?
- หากนักเรียนประสบปัญหาในการระบุจุดผิดพลาดของโปรเจ็กต์ แนะนำให้พวกเขาใช้ฟีเจอร์ Project Stepping ใน VEXcode GO ภาพ ภาพที่มาพร้อมกับ คุณลักษณะ Project Stepping สามารถใช้เพื่อช่วยนักเรียนแก้ไขปัญหาโครงงานของตนโดยสามารถดูบล็อกที่กำลังดำเนินการทีละบล็อกได้ ค่านี้จะทำให้ มองเห็นได้ดีขึ้นว่าบล็อกใดที่อาจทำให้เกิดข้อผิดพลาด ดังนั้นการดีบักจึงกลายเป็นกระบวนการที่ตรงเป้าหมายและมีประสิทธิภาพมากขึ้น สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีใช้ฟีเจอร์ Project Stepping โปรดดูการก้าวผ่านโปรเจ็กต์ในบทความ VEXcode GO VEX Library
- ถามนักเรียนว่าพวกเขาสังเกตเห็นปัญหาครั้งแรกเมื่อใด
- ทำการทดสอบการแก้ไข &
- เมื่อนักเรียนพบข้อผิดพลาด พวกเขาควร แก้ไขโปรเจ็กต์ของตน นักเรียนสามารถทดสอบโปรเจ็กต์พร้อมกับการแก้ไขแต่ละครั้งได้ หากโครงการประสบความสำเร็จ ก็สามารถก้าวไปสู่ขั้นตอนต่อไปในวงจรการแก้ปัญหาได้ หากโครงการไม่ประสบความสำเร็จ พวกเขาสามารถกลับไปที่จุดเริ่มต้นของกระบวนการและลองอีกครั้ง
- สะท้อน
- ขอให้นักเรียนนึกถึงข้อผิดพลาดที่พวกเขาทำและเอาชนะในระหว่างกระบวนการ
- ผิดพลาดอะไร? คุณเรียนรู้อะไรจากความผิดพลาดครั้งนี้? จะช่วยคุณได้อย่างไรเมื่อเข้ารหัส Code Base ในครั้งต่อไป?
- กระตุ้นให้นักเรียนตระหนักถึงข้อผิดพลาดและสิ่งที่พวกเขาเรียนรู้จากกระบวนการเพื่อช่วยส่งเสริมกรอบความคิดในการเติบโต การเน้นย้ำกรอบความคิดแบบเติบโตจะช่วยให้นักเรียนเรียนรู้ว่าจะต้องยืนหยัดเมื่อใดและอย่างไร และเมื่อใดควรขอความช่วยเหลือด้วย2 หากนักเรียนเห็นว่ากระบวนการของตนเองเป็นรากฐานของการเรียนรู้ใหม่ๆ พวกเขาสามารถใช้ขั้นตอนต่างๆ ที่นี่เพื่อส่งเสริมการเรียนรู้ของตนเอง ตลอดจนส่งเสริมการเรียนรู้ของเพื่อนร่วมชั้นด้วย เมื่อนักเรียนพบปัญหาเหล่านี้และไตร่ตรองถึงข้อผิดพลาด ควรกระตุ้นให้พวกเขาแบ่งปันข้อผิดพลาดและดำเนินการกับเพื่อนนักเรียน ด้วยวิธีนี้ นักเรียนสามารถเป็น “แหล่งเรียนรู้ซึ่งกันและกัน”3
- ขอให้นักเรียนนึกถึงข้อผิดพลาดที่พวกเขาทำและเอาชนะในระหว่างกระบวนการ
Clear the Landing Area (แล็บ 2) ได้รับการออกแบบให้เป็นการสำรวจแบบปลายเปิดที่จะขอให้นักเรียนของคุณพยายามแก้ไขปัญหาที่ท้าทาย ในแล็บนี้ เราแนะนำลูปที่มีบล็อก [Forever] และขอให้นักเรียนทดลองโดยใช้ลูปในโครงการเพื่อให้ Code Base ขับเคลื่อนและตรวจจับอุปสรรคทั้งหมดบนพื้นที่ลงจอด (GO Field) หากการใช้ลูปในโปรเจ็กต์เป็นเรื่องใหม่สำหรับนักเรียนของคุณ อาจต้องใช้การวนซ้ำหลายครั้งในโปรเจ็กต์จึงจะใช้ลูปได้อย่างมีประสิทธิภาพ ใช้ข้อเสนอแนะที่ระบุไว้ในส่วนนี้เพื่อเตรียมนักเรียนสำหรับ กระบวนการลองผิดลองถูก และเพื่อช่วยพวกเขาแก้ไขปัญหา โครงงานของตนเพื่อให้บรรลุเป้าหมายของความท้าทาย ส่วนการอำนวยความสะดวก ส่วนของ Play ตอนที่ 1 และ 2 มีการสนับสนุนการสอนเพิ่มเติม สำหรับการนำทางนักเรียนผ่านความท้าทายของ Lab 2 การมีแผนว่าจะให้การสนับสนุนการแก้ปัญหาและการลองผิดลองถูกที่จำเป็นในแล็บนี้อย่างไร สามารถช่วยให้คุณตอบสนองความต้องการส่วนบุคคลของนักเรียนได้
ดู การสร้างความยืดหยุ่นใน STEM Labs VEX Library บทความที่ สำหรับข้อมูลเพิ่มเติมเกี่ยวกับ ว่าผลตอบรับที่มีประสิทธิผลสามารถช่วยให้นักเรียนสร้างความยืดหยุ่นและกรอบความคิดในการเติบโตขณะทำงานผ่าน STEM Labs ได้อย่างไร
1 แฮตตี้ จอห์น และเชอร์ลีย์ คลาร์ก การเรียนรู้ที่มองเห็นได้: ผลตอบรับ เลดจ์, เทย์เลอร์ & กลุ่มฟรานซิส, 2019
2 อ้างแล้ว
3 อ้างแล้ว, น. 121