
L'unité Mars Rover: Landing Challenge mettra vos élèves au défi de créer des projets VEXcode GO pour résoudre un problème. Cette unité présente aux étudiants l'utilisation du capteur oculaire situé à l'avant de la base de code dans le cadre d'un défi inspiré du processus utilisé par les scientifiques lorsqu'ils tentent de faire atterrir un vaisseau spatial, comme le rover Mars 2020 Perseverance. Les élèves coderont la base de code pour détecter un obstacle, puis arrêteront de conduire pour indiquer qu'un obstacle a été trouvé sur le site d'atterrissage.
Mission Mars 2020 de la NASA
La mission Mars 2020 de la NASA répond à des objectifs scientifiques hautement prioritaires pour l'exploration de Mars : la vie, le climat, la géologie et les humains. Mais avant que le rover Perseverance puisse commencer sa mission en collectant des échantillons de roches et de sol à la surface, le rover doit atterrir en toute sécurité sur la planète rouge.
Selon la NASA, seulement 40 % environ des missions envoyées sur Mars (par n’importe quelle agence spatiale) ont été couronnées de succès. L'ensemble du processus d'entrée, de descente et d'atterrissage ne prendra que quelques minutes, mais le vaisseau spatial transportant le rover Perseverance doit ralentir de près de 20 000 km/h (~ 12 500 miles par heure) à zéro et trouver une zone ouverte et plate pour atterrir. . La surface martienne est pleine d’obstacles : d’énormes cratères d’impact, des falaises, des fissures et des rochers déchiquetés. Des vents imprévisibles peuvent également entraîner d’autres complications.

Pour garantir un atterrissage en toute sécurité, le rover Perseverance prendra des images pendant la descente et comparera ces images aux cartes. Il peut rapidement décider si cette zone a été jugée dangereuse par les scientifiques et procéder à des ajustements pour atterrir dans une zone ouverte.
Dans cette unité, les étudiants coderont la base de code pour détecter les obstacles sur les sites d'atterrissage sur leurs champs afin de garantir un atterrissage en toute sécurité pour le rover.
Qu'est-ce qu'un capteur ?
Un capteur est essentiellement un dispositif qui aide un robot à comprendre le monde qui l’entoure. Pour ce faire, il collecte et rapporte des données sur son environnement, qui peuvent ensuite être utilisées dans un projet pour amener le robot à prendre des décisions ou à adopter certains comportements. Cette séquence peut être considérée comme une boucle de décision Sens → Réfléchir → Agir.
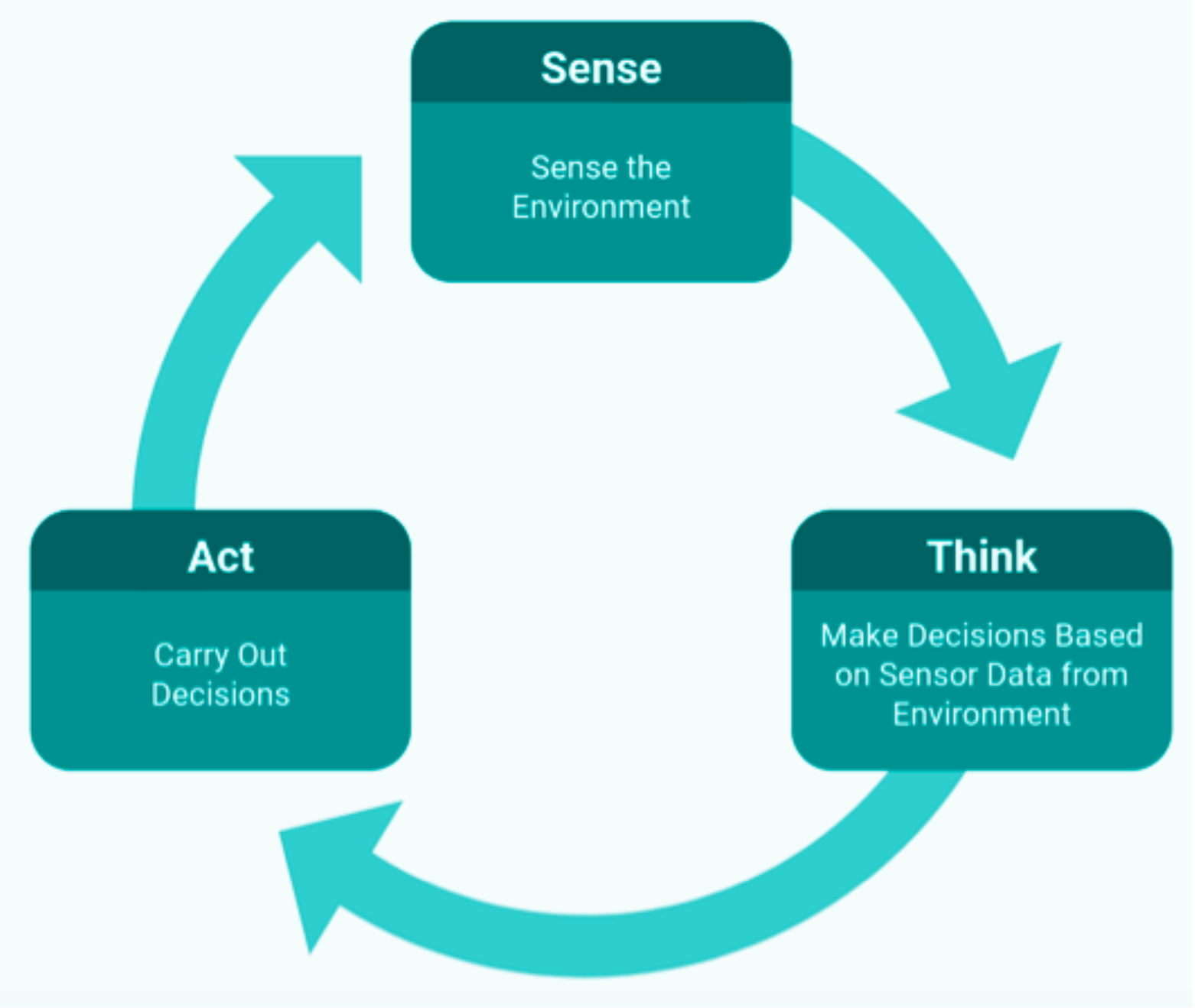
Dans cette unité, la base de code utilisera le capteur oculaire pour détecter objets sur le terrain afin d'aider à dégager la zone pour un atterrissage en toute sécurité du rover. Le projet créé par les étudiants exécute cette boucle car le capteur oculaire sur la base de code détectera la présence d'un objet, puis le VEXcode GO commandera réflexions pour prendre une décision selon que le capteur oculaire détecte ou non un objet. Ensuite, la base de code agira et arrêtera la conduite en fonction de la présence de l'objet.
Qu'est-ce que le capteur oculaire ?
Le Eye Sensor est un capteur qui peut déterminer trois choses : la présence d'un objet, sa couleur et la luminosité d'un objet ou d'une surface. Dans cette unité, le capteur oculaire est utilisé pour détecter un objet afin qu'il puisse être dégagé de la zone d'atterrissage. Les données rapportées par le capteur oculaire peuvent être vues dans la console du moniteur, qui offre aux étudiants une représentation visuelle de ce que le robot « voit » et peut être utilisée pour les aider à faire le lien entre les capteurs et les comportements du robot. . Pour plus d'informations sur l'utilisation de Monitor Console dans VEXcode GO, consultez cet article de la bibliothèque VEX.
Le capteur oculaire sur la base de code - Eye Forward build est situé sur le côté avant, comme indiqué dans l'image ci-dessous. L'Eye Sensor peut être utilisé pour détecter la présence ou l'absence d'un objet, ainsi que sa couleur ou son niveau de luminosité.
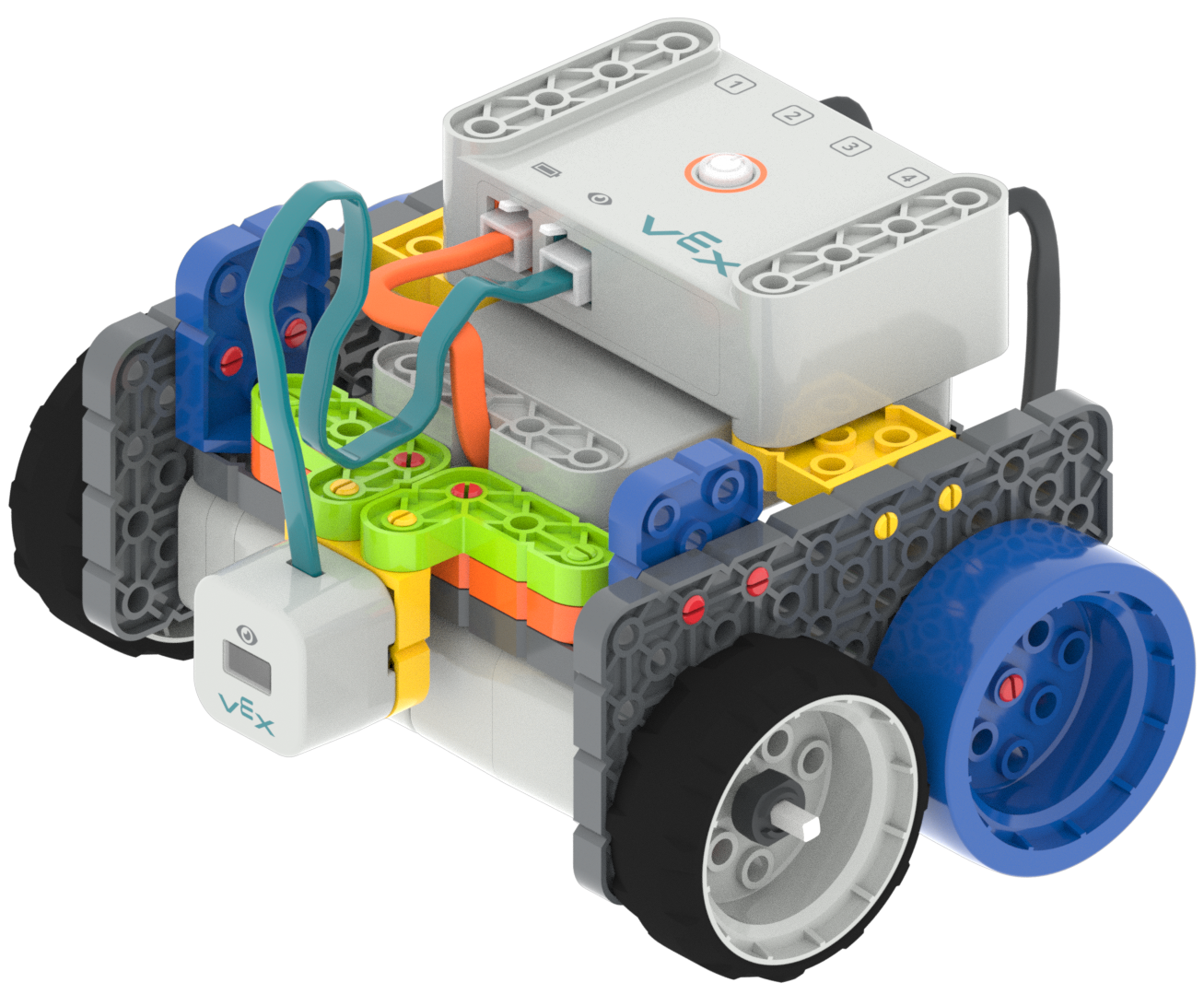
Le capteur oculaire utilise la lumière infrarouge pour détecter les objets. Les objets de couleur claire réfléchissent la lumière infrarouge et sont détectés plus facilement par le capteur oculaire. Les objets de couleur foncée absorbent la lumière infrarouge et le capteur oculaire ne les détecte pas également. Pendant l'unité, utilisez du papier blanc ou de couleur claire pour les obstacles afin de garantir que le capteur oculaire sera capable de détecter ces objets.
Dans cette unité, le capteur oculaire sera utilisé pour détecter lorsqu'un objet est présent sur le chemin de la base de code. La position du capteur oculaire sur la base de code signifie qu'il ne peut détecter que les objets directement devant lui. Soyez conscient de cela lorsque vous placez votre Code Base et les obstacles avec vos élèves afin que le matériel prépare les élèves à la réussite.
Pour plus d'informations sur le capteur oculaire et son fonctionnement, consultez l'article Codage avec le capteur oculaire VEX GO VEX Library.
Qu'est-ce que VEXcode GO ?
VEXcode GO est un environnement de codage utilisé pour communiquer avec les robots VEX GO. Les étudiants utilisent l'interface glisser-déposer pour créer des projets VEXcode GO qui contrôlent les actions de leurs robots. L'objectif de chaque bloc peut être identifié à l'aide d'indices visuels tels que sa forme , sa couleur et son étiquette. Pour plus d'informations sur la façon de travailler avec VEXcode GO, consultez la section VEXcode GO de la bibliothèque VEX.
Les blocs de VEXcode GO représentent les commandes du robot utilisées pour créer un projet dans VEXcode GO. Vous trouverez ci-dessous une liste des principaux blocs utilisés au cours de cette unité.
| Blocs VEXcode GO | Comportements |
|---|---|
 |
Le bloc {When started} commence à exécuter la pile de blocs attachée au démarrage du projet. |
![Bloc [Conduire]](/stemlabs/sites/default/files/inline-images/IMG_3908B0BDE720-1.jpeg) |
Le bloc [Drive] fait avancer ou reculer la transmission pour toujours. |
![[Tourner pour] bloquer](/stemlabs/sites/default/files/inline-images/IMG_4C9CEBAFA9C0-1.jpeg) |
Le bloc [Tourner pour] fait tourner la transmission sur une distance donnée. |
![Blocage [Pour toujours]](/stemlabs/sites/default/files/inline-images/IMG_81A9639F50BD-1.jpeg) |
Le bloc [Forever] répète pour toujours tous les blocs contenus dans le « C ». |
![[Attendez] bloquer](/stemlabs/sites/default/files/inline-images/IMG_BA932FD0539C-1.jpeg) |
Le bloc [Attendre] attend un temps spécifique avant de passer au bloc suivant d'un projet. |
![[Attendez que] bloque](/stemlabs/sites/default/files/inline-images/IMG_F0CE9176887D-1.jpeg) |
Le bloc [Attendre jusqu'à] attend que la condition qu'il contient indique VRAI avant de passer au bloc suivant. |
![Bloc [Objet trouvé]](/stemlabs/sites/default/files/inline-images/IMG_C6D52E895867-1.jpeg) |
Le bloc <Found object> indique si le capteur oculaire détecte un objet. |
![Blocage [Arrêter de conduire]](/stemlabs/sites/default/files/inline-images/IMG_9BF4B55067B3-1.jpeg) |
Le bloc [Arrêter la conduite] arrête la transmission. |
![Bloc [Définir la couleur du pare-chocs]](/stemlabs/sites/default/files/inline-images/IMG_DD0B68773B36-1.jpeg) |
Le bloc [Définir la couleur du pare-chocs] définit la couleur du pare-chocs LED. |
Comment le bloc [Attendre jusqu'à] fonctionne-t-il avec le capteur oculaire ?
Dans cette unité, les étudiants utiliseront le capteur oculaire sur la base de code pour détecter les obstacles dans la zone d'atterrissage du rover martien. Pour coder cela, ils utiliseront le bloc [Attendre jusqu'à] dans un projet. Le bloc [Attendre jusqu'à] est un bloc de contrôle qui vérifie à plusieurs reprises une condition pour contrôler le flux d'un projet. Un projet ne passera pas au bloc suivant jusqu'à ce que la condition du bloc [Attendre jusqu'à] soit vraie. Dans cette unité, le bloc [Attendre jusqu'à] est utilisé avec le bloc <Found object> comme condition - de sorte qu'il attendra que le capteur oculaire détecte un objet et que la condition du bloc <Found object> soit vraie - pour passer au suivant. bloc dans le projet.
Les blocs [Attendre jusqu'à] peuvent être utilisés en conjonction avec des blocs sans attente, comme le bloc [Conduire] dans cette unité, afin que la base de code puisse avancer jusqu'à ce que le capteur oculaire détecte un objet.
Pour voir le déroulement du projet en temps réel pendant que votre robot est en cours d'exécution, regardez la fonctionnalité Highlight dans VEXcode GO. Au début du projet, la surbrillance verte apparaîtra autour du bloc [Attendez jusqu'à] jusqu'à ce que la condition soit vraie. La surbrillance verte apparaîtra pour ignorer les blocs non en attente (dans ce cas le bloc [Drive]) car ces commandes sont exécutées rapidement.
Dans cette unité, les étudiants utiliseront une combinaison de blocs d'attente, comme le bloc [Attendre jusqu'à], et de blocs de non-attente, comme le bloc [Drive], dans leurs projets pour réaliser les activités et les défis du laboratoire. Pour en savoir plus sur les blocs en attente et sans attente dans VEXcode GO, lisez cet article de la bibliothèque VEX.
Préparation à défi ouvert dans cette unité
Dans cette unité, les étudiants seront invités à utiliser ce qu'ils ont appris précédemment pour créer un projet visant à résoudre un défi. Parce qu'il est important de mettre régulièrement les élèves au défi de résoudre des problèmes et d'appliquer les compétences qu'ils ont acquises d'une nouvelle manière, nous vous encourageons à mettre vos élèves au défi et à utiliser ces stratégies pour renforcer leur résilience et pour les aider à les guider tout au long du processus. défi. Voici quelques suggestions pour aider les élèves à expérimenter leurs projets :
Donner du feedback sans donner la solution - Faire des erreurs en relevant un défi est attendu et encouragé. « Les erreurs d’apprentissage peuvent créer des opportunités et peuvent aider à établir des liens. »1 Créer un processus familier de résolution de problèmes avec vos élèves peut les aider à apprendre comment identifier un problème et aller de l'avant lorsqu'ils commettent une erreur, minimisant ainsi les perturbations et la frustration. Essayez d'utiliser le cycle de résolution de problèmes suivant avec vos élèves pour les aider à résoudre leurs projets et à trouver leurs propres solutions.
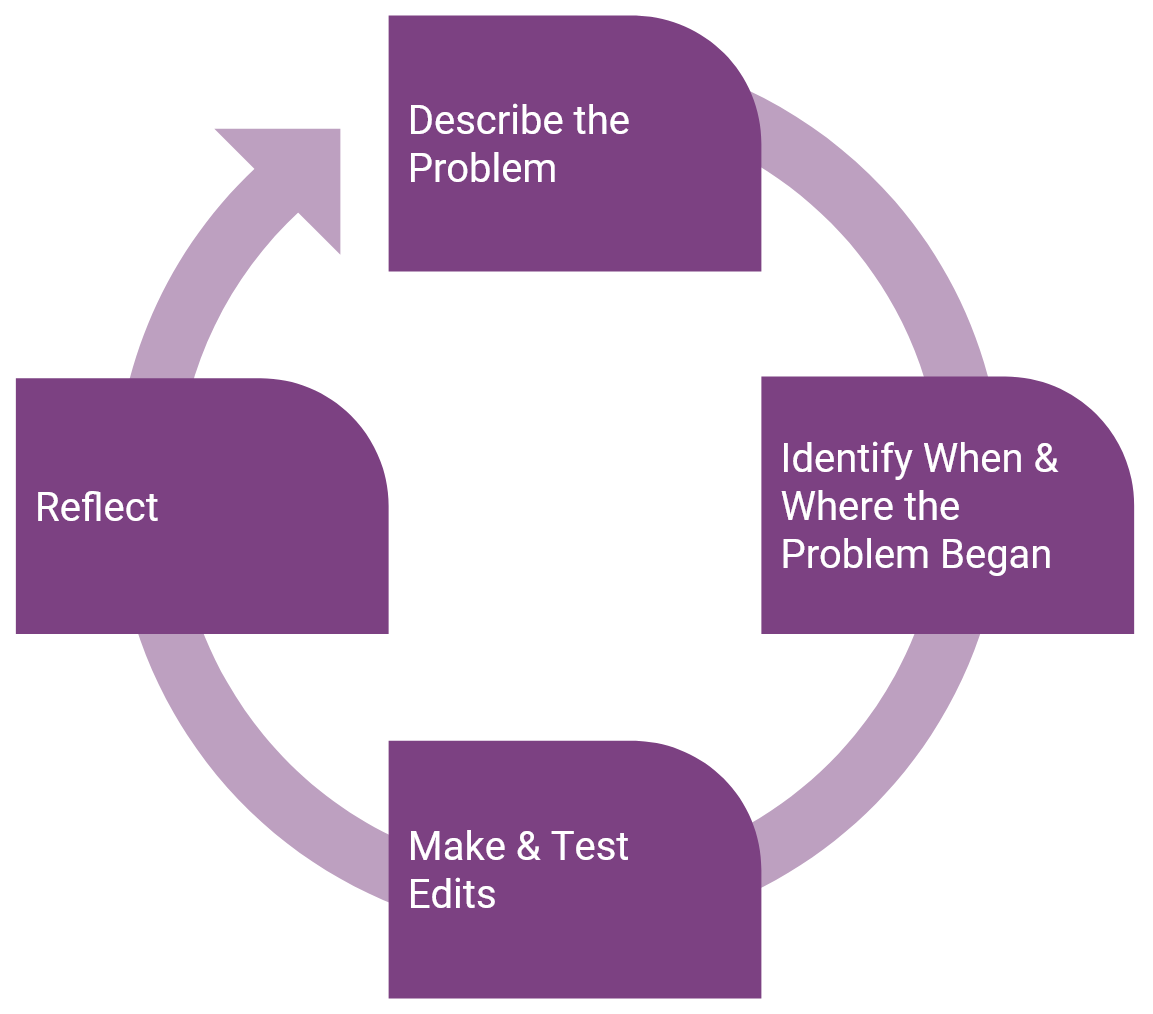
- Décris le problème
- Demandez à l'élève d'expliquer ce qui ne va pas. Les élèves devraient être capables de relier l'erreur à l'objectif commun ou au défi à relever.
- Comment évolue la base de code dans leur projet ? Comment le robot devrait-il se déplacer ?
- Demandez à l'élève d'expliquer ce qui ne va pas. Les élèves devraient être capables de relier l'erreur à l'objectif commun ou au défi à relever.
- Identifiez quand et où le problème a commencé
- Demandez à l’élève quand il a remarqué le problème pour la première fois.
- Quelle partie du projet était en cours d’exécution ?
- Si les élèves ont des difficultés à déterminer où se trouve l'erreur dans le projet, encouragez-les à utiliser la fonction Project Stepping dans VEXcode GO. Les repères visuels fournis avec la fonction Project Stepping peuvent être utilisés pour aider les étudiants à résoudre les problèmes de leur projet en ayant la possibilité de voir les blocs exécutés un par un. Cela leur donnera meilleure idée des blocs susceptibles d'être à l'origine de l'erreur, afin que le débogage puisse devenir un processus plus ciblé et plus efficace. Pour plus d'informations sur l'utilisation de la fonctionnalité Project Stepping, consultez l'article Stepping Through a Project in VEXcode GO VEX Library.
- Demandez à l’élève quand il a remarqué le problème pour la première fois.
- Effectuer & modification de test
- Lorsque les élèves trouvent une erreur, ils doivent pas apporter de modifications à leur projet. Les étudiants peuvent tester le projet à chaque modification effectuée. Si le projet réussit, ils peuvent alors passer à l’étape suivante du cycle de résolution de problèmes. Si le projet échoue, ils peuvent revenir au début du processus et réessayer.
- Refléter
- Demandez aux élèves de réfléchir à l’erreur qu’ils ont commise et surmontée au cours du processus.
- Quelle était l'erreur ? Qu'avez-vous appris de cette erreur ? Comment cela peut-il vous aider lors du prochain codage du Code Base ?
- Encouragez les élèves à reconnaître leurs erreurs et ce qu’ils ont appris du processus pour contribuer à encourager un état d’esprit de croissance. Mettre fortement l’accent sur un état d’esprit de croissance peut aider les élèves à apprendre quand et comment persévérer et aussi quand demander de l’aide.2 Si les élèves peuvent considérer leur processus comme un précurseur d'un nouvel apprentissage, ils peuvent alors utiliser les étapes ici pour approfondir leur propre apprentissage ainsi que celui de leurs camarades de classe. À mesure que les élèves rencontrent ces problèmes et réfléchissent à leurs erreurs, encouragez-les à partager leurs erreurs et leur processus avec leurs camarades. De cette manière, les étudiants peuvent devenir des « ressources d’apprentissage les uns pour les autres ».3
- Demandez aux élèves de réfléchir à l’erreur qu’ils ont commise et surmontée au cours du processus.
Clear the Landing Area (Lab 2) est conçu pour être une exploration ouverte qui demandera à vos élèves de persévérer pour résoudre un défi. Dans cet atelier, nous introduisons les boucles avec le bloc [Forever] et demandons aux étudiants d'expérimenter l'utilisation de boucles dans leur projet pour que la base de code se dirige vers et détecte tous les obstacles sur la zone d'atterrissage (GO Field). Si l’utilisation de boucles dans un projet est nouvelle pour vos élèves, plusieurs itérations de leurs projets peuvent être nécessaires pour utiliser efficacement les boucles. Utilisez les suggestions décrites dans cette section pour préparer les élèves au processus d'essais et d'erreurs et pour les aider à résoudre leurs projets afin d'atteindre l'objectif du défi. La section Facilitation des parties de jeu 1 et 2 contient supports pédagogiques supplémentaires pour guider les étudiants à travers le défi Lab 2. Avoir un plan sur la manière dont vous fournirez un soutien pour la résolution de problèmes et les essais et erreurs requis dans ce laboratoire peut vous aider à répondre aux besoins individuels de vos élèves.
Consultez l'article de la bibliothèque VEX Building Resilience in STEM Labs pour plus d'informations sur la manière dont un feedback efficace peut aider les étudiants à développer leur résilience et un état d'esprit de croissance tout en travaillant dans STEM Labs.
1 Hattie, John et Shirley Clarke. Apprentissage visible : commentaires. Routledge, Groupe Taylor & Francis, 2019.
2 Idem.
3 Idem, p. 121