
Đính hôn
Ra mắt Phần Tương tác
ACTS là những gì giáo viên sẽ làm và ASKS là cách giáo viên sẽ tạo điều kiện.
| CÁC HÀNH VI | HỎI |
|---|---|
|
|
Chuẩn bị cho học sinh xây dựng
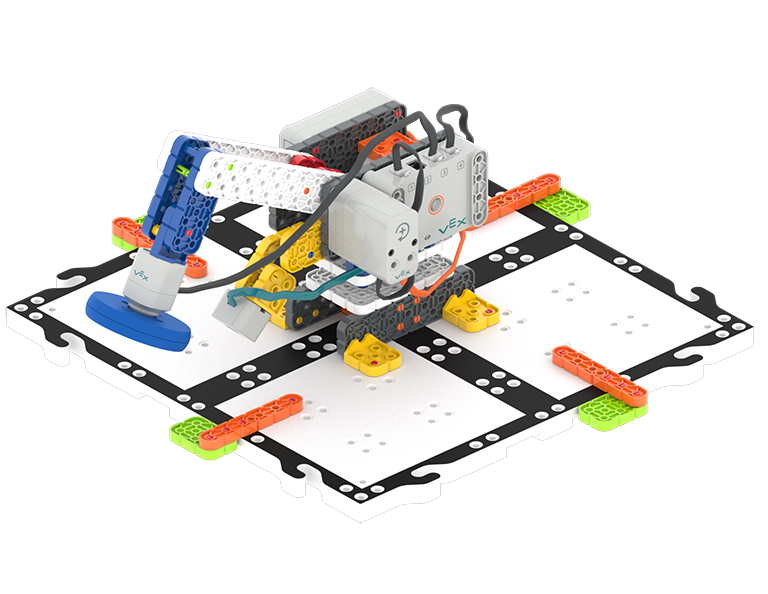
Bạn nghĩ chúng ta có thể sử dụng Cảm biến mắt trên Cánh tay Robot như thế nào để khiến nó thông minh hơn? Hãy cùng chế tạo Cánh tay Robot (2 trục) để giúp chúng ta tìm hiểu nhé!
Tạo điều kiện cho việc xây dựng
-
Hướng dẫnHướng dẫn
học sinh rằng hôm nay các em sẽ chế tạo Cánh tay Robot (2 trục) và sử dụng nó để khám phá cách Cảm biến mắt có thể được sử dụng để giúp Cánh tay Robot phát hiện và di chuyển các vật thể.
Xây dựng cánh tay robot mã (2 trục) Học sinh nên tham gia nhóm của mình từ Phòng thí nghiệm trước và hoàn thành phiếu Vai trò & của Robotics. Sử dụng trang Trách nhiệm vai trò được đề xuất trong Trình chiếu hình ảnh phòng thí nghiệm làm hướng dẫn để sinh viên hoàn thành bảng này.
- Khuyến khích sinh viên luân phiên giữa các loại vai trò Xây dựng/Nhà báo mà họ đã phát triển.
-
Phân phối Hướng Dẫn Xây Dựng Cánh Tay Robot
Mã Phân Phối (2 Trục) cho mỗi nhóm. Các nhà báo nên thu thập các tài liệu trong danh sách kiểm tra.
-
Tạo điều kiệnthuận lợi Tạo điều kiện thuận lợi cho quá trình
xây dựng và thảo luận trong khi học sinh làm việc.
Các nhà xây dựng có thể bắt đầu xây dựng. Các nhà báo nên hỗ trợ hướng dẫn xây dựng khi cần thiết. Để nhắc học viên suy nghĩ về cách Cảm biến Mắt hoạt động trên Cánh tay, hãy đặt các câu hỏi như:
- Một vật thể sẽ cần phải ở đâu để Cảm biến Mắt phát hiện ra nó?
- Bạn nghĩ tại sao chúng tôi đặt Cảm biến Mắt ở đây trên bản dựng?
- Đưa ra các đề xuất vềĐề xuất và lưu ý các chiến lược xây dựng nhóm và giải quyết vấn đề tích cực khi các nhóm cùng nhau xây dựng.

Xử lý sự cố cho giáo viên
- Kiểm tra Dây và Cổng - Để các dự án VEXcode GO hoạt động như dự định với Cánh tay Robot, các dây từ mỗi cảm biến và động cơ phải được cấu hình chính xác. Nếu học sinh gặp khó khăn, hãy yêu cầu các em kiểm tra lại các dây và đảm bảo rằng chúng khớp với danh sách cổng khi hình Cánh tay Robot trong VEXcode GO. Xem bài viết Sử dụng cảm biến VEX GO Thư viện VEX để biết thông tin về kết nối cảm biến.
- Sửa chữa cảm biến mắt - Đôi khi cảm biến mắt sẽ phát hiện nam châm điện thay vì đĩa. Trong tình huống này, dự án có thể không phân biệt được đĩa xanh dương và xanh lục. Hãy thử thêm khối [Wait] sau khi Cảm biến mắt lần đầu tiên phát hiện Đĩa để giải quyết vấn đề này.
- Cánh tay robot không thể quay chính xác 100% -Đôi khi cánh tay sẽ đặt đĩa vào sai vị trí. Đế sẽ không quay chính xác 90 hoặc 180 độ. Cũng giống như con người không chính xác 100% thời gian, các bản dựng sẽ không chính xác 100% thời gian. Đây có thể là một khoảnh khắc có thể dạy được. Một cuộc điều tra hoặc thảo luận về cách học viên có thể cải thiện Cánh tay Robot có thể là một hoạt động mở rộng tuyệt vời!
Chiến lược tạo thuận lợi
- Giải cấu trúc các bản dựng trước đó và làm việc trong các nhóm nhỏ hơn - Nếu bạn muốn quay lại các nhóm nhỏ hơn cho Phòng thí nghiệm 4 và 5, bạn có thể. Giải mã tất cả các cánh tay Robot mã (1 trục) được xây dựng từ Lab 3 và yêu cầu mỗi nhóm nhỏ hơn xây dựng Cánh tay Robot mã (2 trục) từ đầu cho Lab này. Bản dựng này sẽ được sử dụng lại trong Lab 5, vì vậy nhóm nhỏ hơn có thể giữ nguyên.
- Hãy nghĩ về một Tình Trạng như một Câu Hỏi Đúng/Sai - Nếu học viên đang gặp khó khăn để hiểu khái niệm về một tình trạng, hãy giúp các em đóng khung nó như một câu hỏi Đúng hoặc Sai. Ví dụ, "Màu sắc yêu thích của bạn là gì?" sẽ không phải là một điều kiện, bởi vì nó không thể là một câu trả lời Đúng/Sai. "Màu yêu thích của bạn là xanh dương?" tuy nhiên, có thể là Đúng hoặc Sai, vì vậy nó có thể là một điều kiện. Yêu cầu học sinh suy nghĩ một danh sách các câu hỏi theo kiểu tình trạng về những điều các em nhìn thấy để giúp kết nối khái niệm tình trạng với Cảm biến Mắt trong Phòng thí nghiệm.
- Lưu ý:Cánh tay robot di chuyển nhanh và một đĩa có thể bị rơi ra khỏi Nam châm điện khi nó di chuyển xung quanh đế. Điều này có thể gây ngạc nhiên (và thú vị) cho học viên.